第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
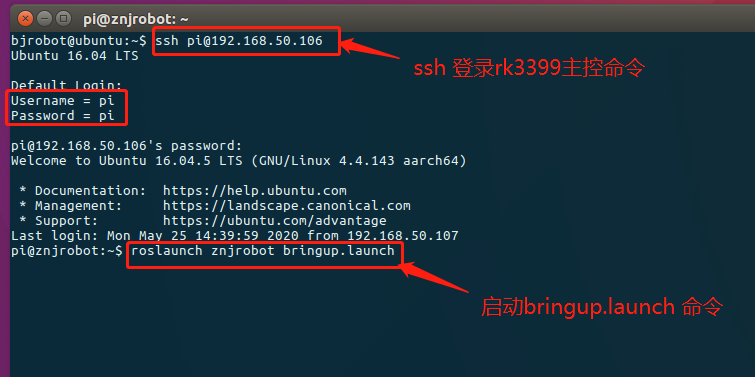
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch
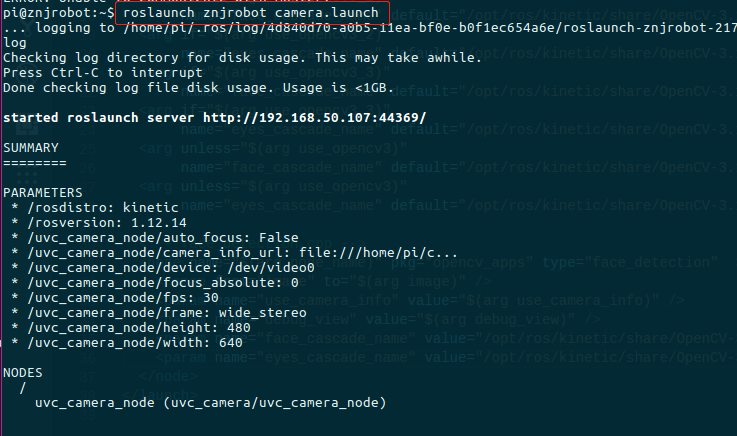
2.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot camera.launch
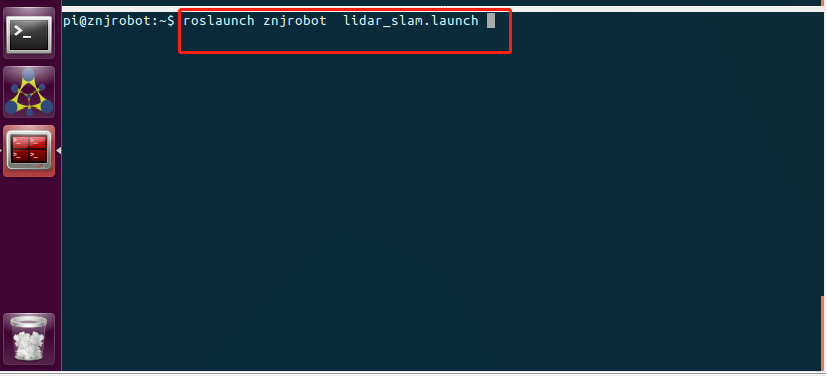
3.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot lidar_slam.launch
4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
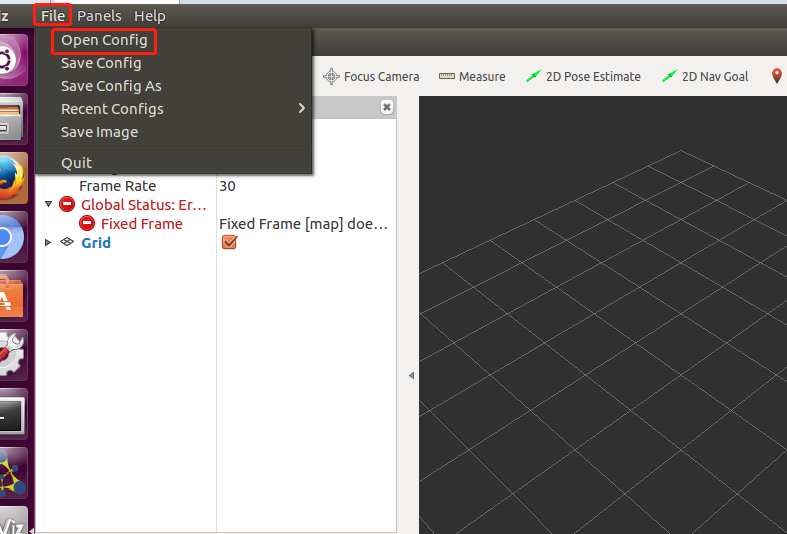
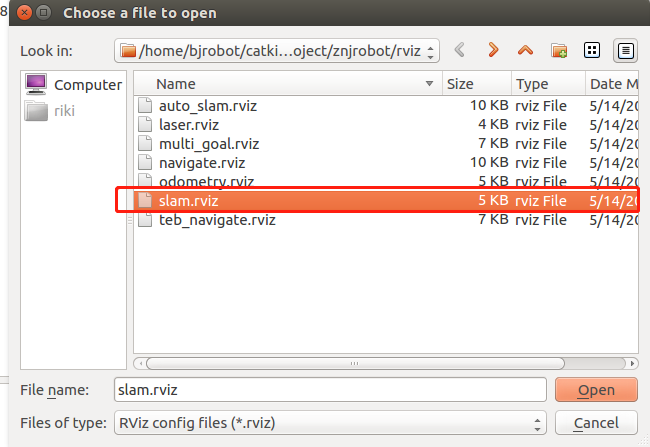
5.全屏化后点击 File,点击 Open Config,

6.找到~/catkin_ws/src/znjrobot_project/znjrobot/rviz/路径下,的 slam.rviz 文件。点击 Open
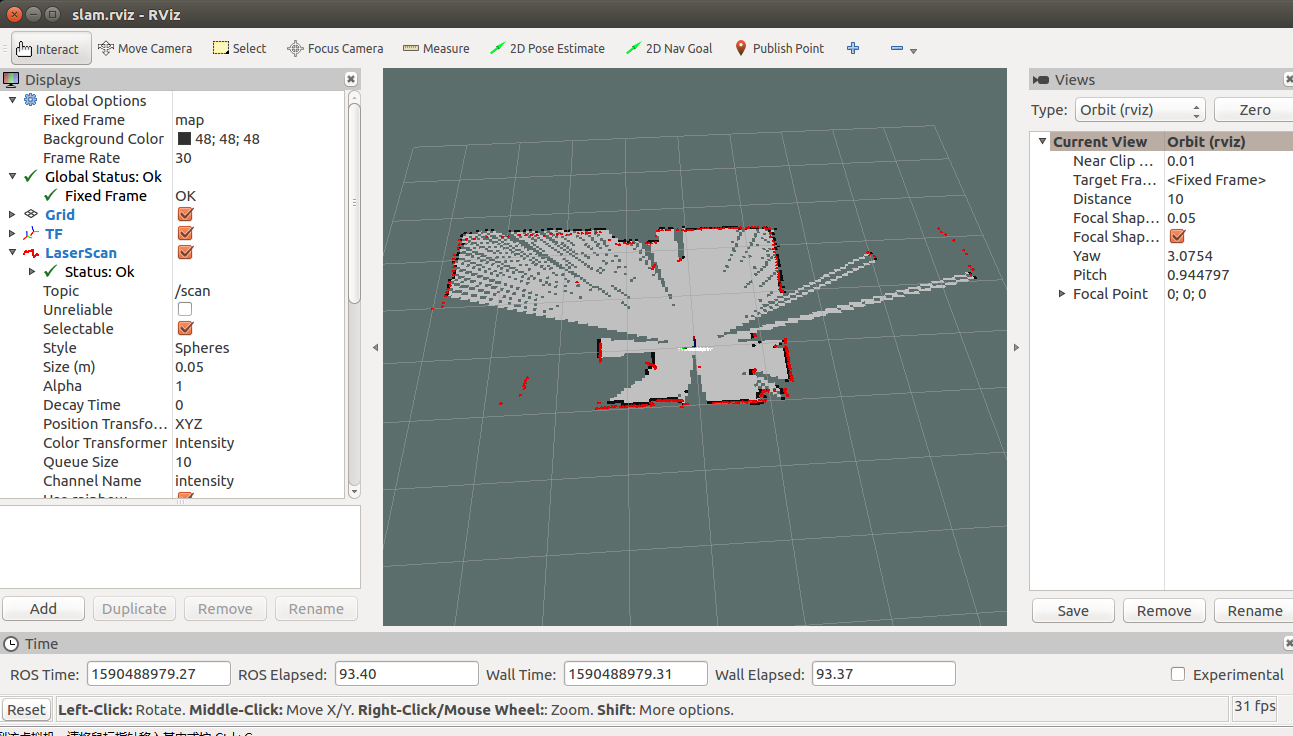
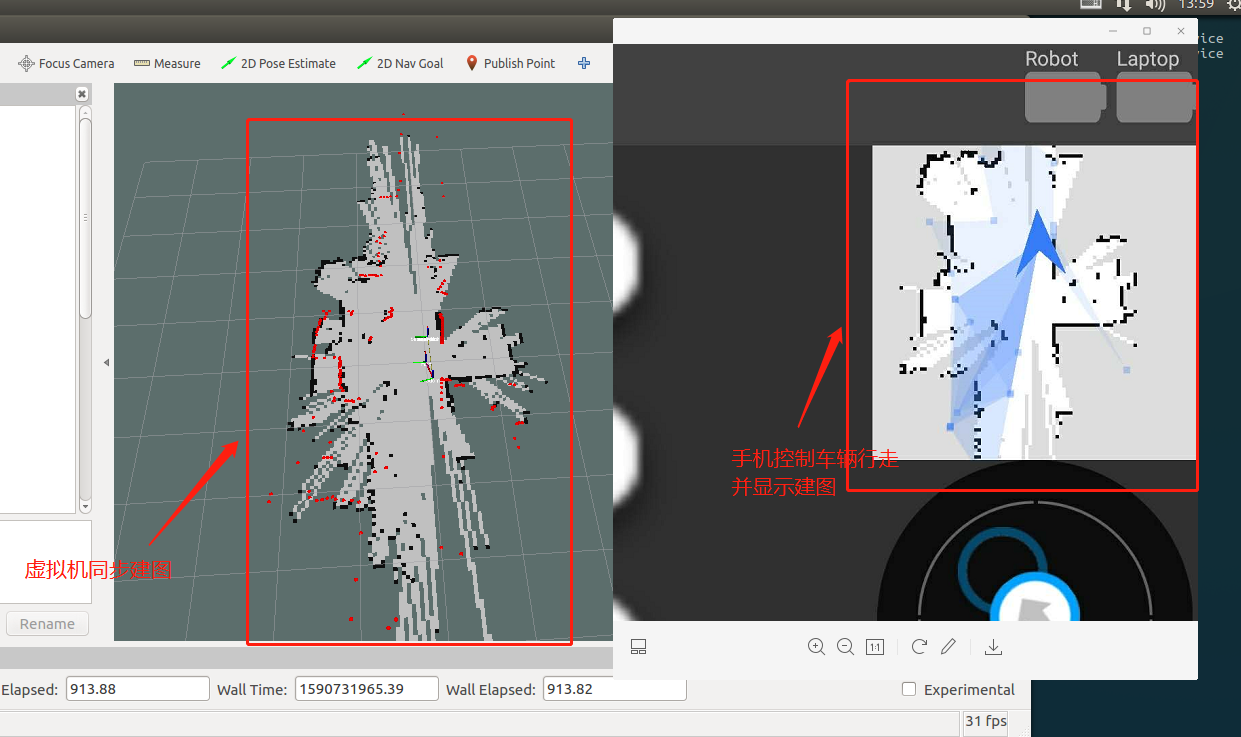
7.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
8.安卓手机下载网盘资料的 Make Map.apk 并安装。
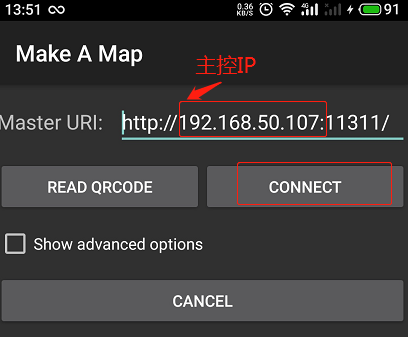
9.安卓手机和小车主控要连接在同一个路由器的 WIFI,打开 Make Map app,如下图所示, Master URI 要指向主控端的 IP,如以下 ip:192.168.50.107 要改成你们小车连接 wifi 后实际的 IP 然后点击CONNECT。
10.通过手机 app 轮盘控制小车移动,完成地图构建。
11.当该区域内的地图扫描完毕后,在虚拟机端,再打开一个终端,ssh 过去主控端, 进入到~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本, 执行保存地图脚本前后可以通过 ll ,查看地图的大小时间等来初步判断地图有无保存成功。
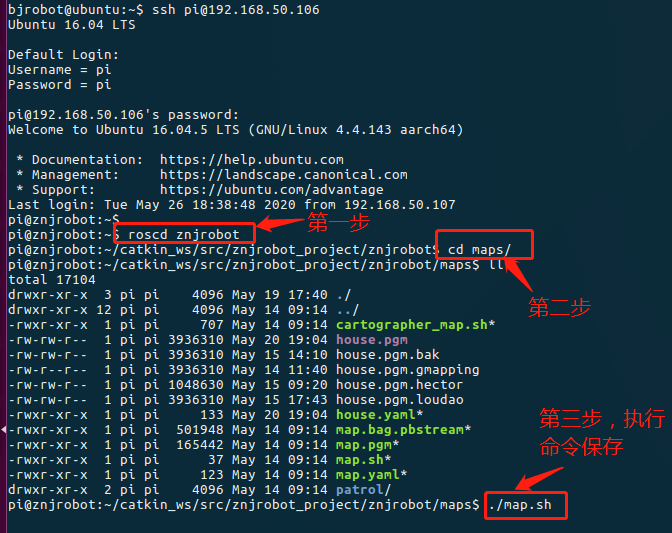
执行完成后,即可查看到在目录下重新生成的house.pgm文件。
第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
随机推荐
- Vue3教程:Vue 3.x 快在哪里?
人云亦云,并不会让你变得有多优秀,而会让你越来越随大流. 当你和别的开发在聊到 Vue 3.0 版本发布,有哪些亮点时,你的答案之一肯定有"它变得更快了,性能上快了 1.2 - 2倍&quo ...
- 手写koa-static源码,深入理解静态服务器原理
这篇文章继续前面的Koa源码系列,这个系列已经有两篇文章了: 第一篇讲解了Koa的核心架构和源码:手写Koa.js源码 第二篇讲解了@koa/router的架构和源码:手写@koa/router源码 ...
- Mac上使用Docker Desktop安装Kubernetes
下载镜像需要特殊手段,你懂的,如果没有特殊手段,建议放弃这种方式. 1 启用Kubernetes 启用过程,会联网下载kubenetes相关的核心组件镜像,如下是我下载好的: 下载好了,kubenet ...
- WinForm 加载大数据时不闪烁的ListView
自己之前做小工具的时候,遇到这个问题,记录一下... namespace 相册处理 { //将ListView重载为此新类,解决加载过程中闪烁的问题 //在designer.cs中改写: //priv ...
- .Net Core ABP应用如何在阿里云Linux Docker中开启Https
.Net Core应用开启Https本身就有很多种方式:1.代码配置2.环境变量3.反向代理 这里主要记录下阿里云的ECS,加阿里云免费的SSL证书,通过程序代码,如何进行配置. 首先从阿里云下载证书 ...
- 使用MySQL乐观锁解决超卖问题
在秒杀系统设计中,超卖是一个经典.常见的问题,任何商品都会有数量上限,如何避免成功下订单买到商品的人数不超过商品数量的上限,这是每个抢购活动都要面临的难点. 1 超卖问题描述 在多个用户同时发起对同一 ...
- String概述
String的基本特性 String是字符串,使用一对引号("")包装. String声明是final的,不可被继承. String实现了Serializable接口,表示字符串是 ...
- SpringBoot-2.3镜像方案为什么要做多个layer
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- mysql中FILE权限
FILE权限指的是对服务器主机上文件的访问,数据库用户拥有FILE权限才可以执行select into outfile,load data infile操作. 参考文章:http://blog.itp ...
- docker 安装es跟kibana
首先docker 查询es docker search elasticsearch 在docker pull elasticsearch:7.9.3 docker在查询 kibana docker ...