IGH_Master主站配置驱动伺服电机和变频器总结
IGH_Master主站配置驱动伺服电机和变频器总结
Ethercat是倍福公司提出的一种工业现场总线协议,具有很好的实时性,IGH是一种开源的Ethercat主站实现协议,本文总结了一下使用IGH_Master驱动伺服电机和变频器的经验
1、Ethercat_Tools的使用
安装好IGH_Master后,在/ethercat/igh/out/bin文件夹下,使用./ethercat --help命令可以查看Ethercat的工具,这些工具可以查看连接至主站的从站的各种信息,极大方便主站驱动程序的编写,下面具体的介绍了一下各参数及命令的使用,其中[ ]中为必选参数,< >为可选参数。
设置别名地址
命令:ethercat alias [ OPTIONS ] < ALIAS >
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --force -f:匹配所有从站;
例子:
sudo ethercat alias --position 0 0x2000
解析:将在bus总线上对应的从站0的别名(默认为0)为0x2000;
注意:必须有从站连接才能使用此命令。
显示总线配置
命令:ethercat config [ OPTIONS ]
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --verbose -v:显示详细信息;
例子:
sudo ethercat config -v
解析:显示所有从站的详细配置信息。
注意:必须启动应用程序才能使用此命令查看。
以C语言的形式输出PDO信息
说明:生成的PDO信息可以直接被应用层的ecrt_slave_config_pdos()函数调用。
命令:ethercat cstruct [ OPTIONS ]
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
例子:
sudo ethercat cstruct -a 100
解析:输出别名为100的从站的PDO信息。
注意:必须有从站连接才能使用此命令。
显示过程数据
说明:输出二进制的过程数据。
命令:ethercat data [ OPTIONS ]
参数:
* --domain -d <index> <index>:域的索引值,假如不填写参数则显示所有过程数据。
例子:
sudo ethercat data
解析:显示所有PDO过程数据。
注意:必须启动应用程序才能使用此命令查看。
设置主站调试级别
说明:设置主站的调试级别,调试信息将输出在/var/log/syslog文件中。
命令:ethercat debug <LEVEL>
其中可有以下情况:
* 0 : 无任何调试信息输出
* 1 : 输出部分调试信息
* 2 : 输出所有的帧的内容(由于输出信息较多,请谨慎使用)
例子:
sudo ethercat debug 1
解析:打开部分调试信息输出
配置域
说明:显示域的信息。
命令:ethercat domains [ OPTIONS ]
参数:
* --domain -d <index> <index>:根据索引号,匹配域;
* --verbose -v:显示域的详细信息(FMMU和过程数据的信息);
例子:
① sudo ethercat domains执行后显示
Domain0:LogBaseAddr 0x00000000, Size 12, WorkingCounter 0/3
以上各字段的含义:
* LogBaseAddr:逻辑寻址的逻辑基地址;
* Size:域交换数据的字节数;
* WorkingCounter:第一个数字是WKC的当前值,第二个数字是WKC的期望值;
解析:显示域的基本信息。
② sudo ethercat domains -v执行后显示
Domain0:LogBaseAddr 0x00000000, Size 12, WorkingCounter 3/3
SlaveConfig 0:0, SM2 (Output), LogAddr 0x00000000, Size 6 06 00 9d aa 00 00
SlaveConfig 0:0, SM3 (Input), LogAddr 0x00000000, Size 6 31 0a 9d aa 00 00
以上各字段的含义:
* SlaveConfig:从机配置信息,主要包含别名和地址(绝对地址或相对地址);
* SM2:同步管理器2;
* LogAddr:FMMU映射的地址;
* Size:映射地址的大小;
* 数据位:十六进制显示的过程数据;
解析:显示域的详细信息(FMMU和过程数据的信息)。
注意:必须启动应用程序才能使用此命令查看。
写入SDO
说明:向从站写一条PDO条目。
命令:ethercat download [ OPTIONS ] <INDEX> <SUBINDEX> <VALUE>
参数:
⑴ 可选参数:
* INDEX:16位无符整型的SDO索引;
* SUBINDEX:8位无符整型的SDO子索引;
* VALUE:需写入的SDO的值
⑵ [ OPTIONS ]参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --type -t <type>:SDO条目的数据类型;
type可使用的类型有:
bool、int8、int16、int32、int64、uint8、uint16、uint32、uint64、float、double、string、octet_string、unicode_string
对于sign-and-magnitude coding有:
sm8、sm16、sm32、sm64
例子:
sudo ethercat download -t int16 -p 0 0x6060 00 08
解析:向从站0的索引号为0x6060(16位),子索引号为00(8位)的地址写入PDO条目值”0x08“;
读取SDO
说明:向从站读取一个SDO条目。
命令:ethercat upload [ OPTIONS ] <INDEX> <SUBINDEX>
参数:
⑴ 可选参数:
* INDEX:16位无符整型的SDO索引;
* SUBINDEX:8位无符整型的SDO子索引;
⑵ [ OPTIONS ]参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --type -t <type>:SDO条目的数据类型;
type可使用的类型有:
bool、int8、int16、int32、int64、uint8、uint16、uint32、uint64、float、double、string、octet_string、unicode_string
对于sign-and-magnitude coding有:
sm8、sm16、sm32、sm64
例子:
sudo ethercat upload -t int16 -p 0 0x6060 00
解析:读取从站0中索引号为0x6060(16位),子索引号为00(8位)的SDO条目。
注意:必须有从站连接才能使用此命令。
创建一个拓扑图形
说明:输出总线拓扑图。
命令:ethercat graph [ OPTIONS ]
例子:
sudo ethercat graph | dot -Tsvg > ~/Desktop/bus.svg
解析:将总线拓扑图输出到桌面。
主站和以太网设备
说明:显示主站和以太网设备信息。
命令:ethercat master [ OPTIONS ]
参数:
* --master -m <indices>:indices为主站的索引。默认显示所有的设备信息;
例子:
sudo ethercat master
解析:显示所有主机的设备信息(发送帧、接收帧、参考时钟、应用时间)。
注意:欲想显示应用时间需启动应用程序。
同步管理,PDOs,PDO条目
说明:显示出同步管理器的参数和PDO任务和映射信息。
命令:ethercat pdos [OPTIONS]
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --skin -s <skin>:”skin”可选择”default“和”etherlab“;
例子:
sudo ethercat pdos -p 0 -s default执行后显示:
SM2:PhysAddr 0x1400, DefaultSize 64, ControlRegister 0x34, Enable 1
RxPDO 0x1600 "Receive PDO1 Mapping"
PDO entry 0x6040:00, 16 bit, " "
PDO entry 0x607a:00, 32 bit, " "
以上各字段的含义:
⑴ 同步管理器信息
* SM2:同步管理器2;
* PhysAddr:物理地址开始地址;
* DefaultSize:默认数据大小;
* ControlRegister:控制寄存器;
* Enable:使能字
⑵ 显示PDO方向,索引值,PDO名字
* RxPDO:代表从站发送数据的方向(从站接收数据);
* 0x1600:PDO的索引值;
* “Receive PDO1 Mapping”:PDO的名字;
⑶ 显示PDO条目的索引和子索引(都是以16进制的形式现实的),显示位宽和描述
* 0x6040:00 : 表示索引和子索引;
* 16bit:表示该条目的位宽;
* ” “:表示该位的描述;
寄存器访问
获取对应从站寄存器的内容
命令:ethercat reg_read [ OPTIONS ] <ADDRESS> [ SIZE ]
参数:
① 可选参数
* ADDRESS:16位无符号的寄存器地址;
* SIZE:要读取的对应寄存器字节数(16位无符号值);[ SIZE ] + ADDRESS不能超过64K,假如type参数隐含要读取的字节数,则可以忽略掉[ SIZE ]参数;
② [ OPTIONS ]参数
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --type -t <type>:匹配数据类型;
type可使用的类型有:
bool、int8、int16、int32、int64、uint8、uint16、uint32、uint64、float、double、string、octet_string、unicode_string
对于sign-and-magnitude coding有:
sm8、sm16、sm32、sm64
例子:
sudo ethercat reg_read -p 6 -t sm32 0x092c
解析:获取从站6的0x092C寄存器所存储的值。
将内容写入指定从站寄存器
命令:ethercat reg_write [ OPTIONS ] <ADDRESS> <DATA>
参数:
① 可选参数
* ADDRESS:16位无符号的寄存器地址;
* DATA:要写入寄存器的数据;假如制定了”type”数据类型,那么”DATA”根据指定的数据类型对数据进行解析;假如未指定”type”数据类型,则”DATA”可以为指定的文件或将”DATA”设置为” - “,表示从标准输入中获得数据;
② [ OPTIONS ]参数
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对地址;
* --type -t <type>:匹配数据类型;
* --emergency -e:以紧急的方式请求写入文件;
例子:
sudo ethercat reg_write -p 5 -t sm32 0x092c 200
解析:向从站5的寄存器0x092c写入数据200。
SDO字典
说明:列出SDO字典(SDO信息和SDO条目信息)。
命令:ethercat sdos [ OPTIONS ]
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对位置;
* --quiet -q:只输出PDOs,不输出PDO条目信息;
例子:
sudo ethercat sdos执行后显示
SDO 0x1000,"Device type"
0x1000:0, r-r-r-, uint32, 32 bit, "Device type"
SDOs:SDO 0x1000,”Device type”
* 0x1000:SDO索引值;
* “Device type”:SDO名字;
SDO条目:0x1000:0, r-r-r-, uint32, 32 bit, “Device type”
* 0x1000:0:索引值及子索引值;
* r-r-r-:表示访问权限;
* uint32:表示该条目的数据类型;
* 32bit:表示该条目的位宽;
* “Device type”:对该条目的描述;
显示从站的信息
说明:显示总线上的从站的信息。
命令:ethercat slaves [ OPTIONS ]
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对地址;
* --verbose -v:显示从站的详细信息;
例子:
sudo ethercat slaves -v
解析:显示所有从站的详细信息。
生成从站配置描述
说明:生成从站信息描述文件。
命令:ethercat xml [ OPTIONS ]
参数:
* --alias -a <alias>:匹配从站的别名;
* --position -p <pos>:匹配从站的绝对地址;
例子:
sudo ethercat xml -p 0
解析:生成从站0的从站信息描述文件并显示出来。
这一节的内容我参考了识荒者的Ethercat解析(十二)之命令行工具的使用这篇文章,这里只列出了配置伺服和变频需要用到的工具,更多工具请移步该作者原文,感谢识荒者的分享
2、主站配置要点
应用程序是用户针对自身控制系统的控制要求编写的控制程序模块,运行于内核层。包括对主站和从站的配置以及周期性实时运行的任务。在实时任务程序中实现主从站间通讯以及各种数控算法。主要包括两块:
- 主站和从站的配置;
- 周期任务的实现 cyclic operation;
先上图:

主站、从站以及数据域的配置过程如下
请求用于实时操作的 EtherCAT 主站,调用 ecrt_request_master(),获取主站的指针 ec_master_t *;
master = ecrt_request_master(0)
创建新的过程数据域,调用 ecrt_master_create_domain(),获取主站的一个数据域指针 ec_domain_t *;
domain1 = ecrt_master_create_domain(master)
获取从站配置,调用 ecrt_master_slave_config(),通过输入主站指针,从站化名,从站位置,从站厂商 ID 和从站产品号从而产生从站配置信息 sc_ana_in,并获得从站配置指针 ec_slave_config_t *;
sc_ana_in = ecrt_master_slave_config('主站指针', '配置信息','从站信息')
调用 ecrt_slave_config_pdos(),通过输入从站配置信息、从站同步管理信息,定义一个完整 PDO 配置;
ecrt_slave_config_pdos('从站配置指针', EC_END, '从站同步管理信息')
*调用 ecrt_slave_config_create_sdo_request(),通过输入从站配置信息、SDO 索引号、子索引号和数据长度,获得 SDO 请求指针,从而创造一个完整 SDO 请求用于实时操作的交换 SDO 数据;
sdo = ecrt_slave_config_create_sdo_request(sc_ana_in, 0x3102, 2, 2)
*调用 ecrt_sdo_request_timeout(),设置 SDO 请求最大超时时间
ecrt_sdo_request_timeout(sdo, 500); // ms
调用 ecrt_domain_reg_pdo_entry_list(),通过输入数据域指针和从站 PDO 入口注册信息,为数据域注册一系列 PDO 入口
ecrt_domain_reg_pdo_entry_list(domain1, domain1_regs)
调用 ecrt_master_activate(),完成本次配置阶段,准备进入实时周期任务循环:
ecrt_master_activate(master)
调用 ecrt_domain_data(),返回数据域的过程数据指针,为数据域指针分配地址,准备实时访问数据域
domain1_pd = ecrt_domain_data(domain1)
结束配置,创建一个实时的 timer,执行周期性任务函数 cyclic_task
周期性任务函数 cyclic_task
主站从设备获取数据帧并且处理报文
// receive process data
ecrt_master_receive(master);
判断数据域报文的状态
ecrt_domain_process(domain1);
判断数据域、主站、从站状态是否发生变化,有变化就提示信息
// check process data state (optional)
check_domain1_state(); // check for master state (optional)
check_master_state();
// check for islave configuration state(s) (optional)
check_slave_config_states();
读写过程数据相关函数
EC_READ_U16("数据域指针 + 地址偏移量")
EC_WRITE_U16("数据域指针 + 地址偏移量")
将数据域的所有报文插入到主站的报文序列
// send process data
ecrt_domain_queue(domain1);
将主站所有报文发送到传输序列
ecrt_master_send(master)
本小节主要参考了《IGH软件代码说明》,未找到出处,在此致谢!
3、伺服电机配置要点
本次我们使用的是台达的伺服电机,型号为ASDA-A2-E,使用 CANopen 基于 DS402 协议控制伺服电机,具体过程如下:
1.使用ethercat slaves [ OPTIONS ]命令读取从站的列表,确保从站已经正常连接至主站
0 15:0 PREOP + Delta ASDA-A2-E EtherCAT(CoE) Drive Rev4
1 1:0 PREOP + EK1100 EtherCAT Coupler (2A E-Bus)
2 2:0 PREOP + EL1809 16K. Dig. Eingang 24V, 3ms
解析:
第一列为从站相对于主站的绝对位置,可以用这个绝对位置来读取从站配置,在一些命令的选项后可加上' -p 1'这样的选项来读取1号从站的信息,当然也可以使用
ethercat alias [ OPTIONS ] < ALIAS >
给从站设置别名,然后使用' -a <别名>'这样的方式来访问指定的从站;
后面会有从站设备的型号,帮助确定是不是我们期望的主站连接成功;
2.使用sudo ethercat slaves -v -p 0可以输出 0 号从站目前的所有信息
=== Master 0, Slave 0 === //主站和从站编号
Alias: 15 //别名
Device: Main
State: PREOP //状态
Flag: +
Identity:
Vendor Id: 0x000001dd
Product code: 0x10305070 //产品ID和编号
Revision number: 0x02040608
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 32 bit
DC system time transmission delay: 0 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 MII up open yes - 488154000 0 0
1 MII up open yes 1 488158324 4324 641
2 N/A down closed no - - - -
3 N/A down closed no - - - -
Mailboxes:
Bootstrap RX: 0x0000/0, TX: 0x0000/0
Standard RX: 0x1000/128, TX: 0x10c0/128
Supported protocols: CoE
General:
Group: ServoDrive
Image name:
Order number:
Device name: Delta ASDA-A2-E EtherCAT(CoE) Drive Rev4 //设备型号
CoE details: //设置信息
Enable SDO: yes
Enable SDO Info: yes
Enable PDO Assign: yes
Enable PDO Configuration: yes
Enable Upload at startup: no
Enable SDO complete access: no
Flags: //状态信息
Enable SafeOp: no
Enable notLRW: no
Current consumption: 0 mA
通过这些信息我们就可以判断从站目前的状态,可操作性等;
Vendor Id: 0x000001dd
Product code: 0x10305070
这是从站的信息,可以用它确定目标从站,所以可以先建立一个设备:
#define asda_Pos0 0, 0
#define asda 0x000001dd, 0x10305070
3.现在我们需要在程序里建立从站配置指针:
static ec_slave_config_t *sc_asda;
static ec_slave_config_state_t sc_asda_state;
并且,使用ethercat xml -p 0命令,我们可以查看设备的描述文件:
<?xml version="1.0" ?>
<EtherCATInfo>
<!-- Slave 0 --> //从站0
<Vendor>
<Id>477</Id>
</Vendor>
<Descriptions>
<Devices>
<Device>
<Type ProductCode="#x10305070" RevisionNo="#x02040608"></Type>
<Name><![CDATA[Delta ASDA-A2-E EtherCAT(CoE) Drive Rev4]]></Name>
<Sm Enable="1" StartAddress="#x1000" ControlByte="#x36" DefaultSize="128" />
<Sm Enable="1" StartAddress="#x10c0" ControlByte="#x32" DefaultSize="128" />
<Sm Enable="1" StartAddress="#x1180" ControlByte="#x24" DefaultSize="6" />
<Sm Enable="1" StartAddress="#x1480" ControlByte="#x0" DefaultSize="6" />
/*
该设备拥有四个同步管理通道:
·前两个为邮箱 MBox 传输方式,用于 COE 协议的通讯,负责对 SDO 的传输;
·后两个为过程数据传输方式,负责对 PDO 的传输;
其中:
StartAddress 参数为物理起始地址,即该同步管理通道在双口 RAM 上的起始地址;
ControlByte 参数为控制字,包含了该通道的传输方式、传输方向等信息;
MinSize、MaxSize 和 DefaultSize 三个参数规定了该通道的大小。
*/
<RxPdo Sm="2" Fixed="1" Mandatory="1">
<Index>#x1600</Index> //RXPDO地址
<Name>RxPDO</Name> //接收(从主站)PDO
<Entry>
<Index>#x6040</Index>
<SubIndex>0</SubIndex> //索引号为0
<BitLen>16</BitLen> //字节大小,决定了你要用EC_WRITE_U16写入
<Name></Name>
<DataType>UINT16</DataType>
</Entry>
<Entry>
<Index>#x607a</Index>
<SubIndex>0</SubIndex>
<BitLen>32</BitLen>
<Name></Name>
<DataType>UINT32</DataType>
</Entry>
<Entry>
<Index>#x6060</Index>
<SubIndex>0</SubIndex>
<BitLen>8</BitLen>
<Name></Name>
<DataType>UINT8</DataType>
</Entry>
</RxPdo>
<TxPdo Sm="3" Fixed="1" Mandatory="1">
<Index>#x1a00</Index> //TXPDO地址
<Name>TxPDO</Name> //发送(向主站)PDO
<Entry>
<Index>#x6041</Index>
<SubIndex>0</SubIndex>
<BitLen>16</BitLen> //字节大小,决定了你要用EC_READ_U16读取
<Name></Name>
<DataType>UINT16</DataType>
</Entry>
<Entry>
<Index>#x6064</Index>
<SubIndex>0</SubIndex>
<BitLen>32</BitLen>
<Name></Name>
<DataType>UINT32</DataType>
</Entry>
<Entry>
<Index>#x6061</Index>
<SubIndex>0</SubIndex>
<BitLen>8</BitLen>
<Name></Name>
<DataType>UINT8</DataType>
</Entry>
<Entry>
<Index>#x603f</Index>
<SubIndex>0</SubIndex>
<BitLen>16</BitLen>
<Name></Name>
<DataType>UINT16</DataType>
</Entry>
</TxPdo>
</Device>
</Devices>
</Descriptions>
</EtherCATInfo>
4.使用ethercat cstruct -p 0命令得到Ethercat主站自动生成的C语言PDO信息,这个信息可以直接粘贴到程序里;
/* Master 0, Slave 0
* Vendor ID: 0x000001dd
* Product code: 0x10305070
* Revision number: 0x02040608
*/
ec_pdo_entry_info_t slave_0_pdo_entries[] = {
{0x6040, 0x00, 16}, //DS402操作字
{0x607a, 0x00, 32},
{0x6060, 0x00, 8},
{0x6041, 0x00, 16}, //DS402状态字
{0x6064, 0x00, 32},
{0x6061, 0x00, 8},
{0x603f, 0x00, 16},
};
ec_pdo_info_t slave_0_pdos[] = {
{0x1600, 3, slave_0_pdo_entries + 0}, /* RxPDO */
{0x1a00, 4, slave_0_pdo_entries + 3}, /* TxPDO */
};
ec_sync_info_t slave_0_syncs[] = {
{0, EC_DIR_OUTPUT, 0, NULL, EC_WD_DISABLE},
{1, EC_DIR_INPUT, 0, NULL, EC_WD_DISABLE},
{2, EC_DIR_OUTPUT, 1, slave_0_pdos + 0, EC_WD_DISABLE},
{3, EC_DIR_INPUT, 1, slave_0_pdos + 1, EC_WD_DISABLE},
{0xff}
};
仔细观察生成的PDO信息我发现:
第一步:slave_0_pdo_entries[]建立了一个操作数组;
第二步:在slave_0_pdos[]中,根据前面得到的XML信息,将slave_0_pdo_entries[]中从0号位置(slave_0_pdo_entries + 0)开始的3个地址对应到伺服驱动器RxPDO地址->0x1600;
slave_0_pdo_entries[]中从3号位置(slave_0_pdo_entries + 3)开始的4个地址对应到伺服驱动器TxPDO地址->0x1a00;
第三步:将PDO信息 slave_0_pdos[] 对应到同步信息 slave_0_syncs[] 中:
slave_0_pdos + 0 是 {0x1600, 3, slave_0_pdo_entries + 0}, /* RxPDO */,方向为OUTPUT
slave_0_pdos + 1 是 {0x1a00, 4, slave_0_pdo_entries + 3}, /* TxPDO */,方向为INPUT
应用程序将以上同步管理信息写入数据结构 ec_sync_info_t 中,作为
ecrt_slave_config_pdos()的参数,通过调用该函数最终完成完整的 PDO 配置。
这是我的个人理解,有问题欢迎指出;
5.获取从站配置,调用 ecrt_master_slave_config(),通过输入主站指针, 从站化名 / 从站位置 / 从站厂商 ID 和从站产品号从而产生从站配置信息 sc_ana_in,并获得从站配置指针ec_slave_config_t *;
ecrt_master_slave_config(master, asda_Pos0, asda);
6.调用 ecrt_slave_config_pdos(),通过输入从站配置指针、从站同步管理信息,定义一个完整 PDO 配置;
ecrt_slave_config_pdos(sc_asda, EC_END, asda_syncs);
参数:
1->从站指针;
2->EC_END(查看库文件发现 -> #define EC_END ~0U,注释里面说:/**End of list marker(列表结束标记),是一个固定格式,应该还有其他参数,不过没有用到,目前就没有深究);
3->同步信息
7.调用 ecrt_domain_reg_pdo_entry_list(),通过输入数据域指针和从站 PDO 入口注册信息,为数据域注册一系列 PDO 入口
domainServoOutput = ecrt_master_create_domain(master);
domainServoInput = ecrt_master_create_domain(master);
//通过ecrt_master_create_domain("主站指针”)创建新的数据域
static unsigned int cntlwd; //控制字
static unsigned int ipData; //目标位置
static unsigned int status|; //状态字
static unsigned int actpos|; //当前回授位置
static unsigned int modes_of_operation|; //6060
static unsigned int modes_of_operation_display|; //6061
static unsigned int errcode; //错误代码
//定义从站信息接收变量
ec_pdo_entry_reg_t domainServoOutput_regs[] = {
{asda_Pos0, asda, 0x6040, 0x00, &cntlwd, NULL},
{asda_Pos0, asda, 0x607a, 0x00, &ipData, NULL},
{asda_Pos0, asda, 0x6060, 0x00, &modes_of_operation[0], NULL},
{}};
//写操作状态字注册,以第一条为例,每一条都需要提供的参数有:
asda_Pos0 主从站编号
asda 从站信息
0x6040 PDO 地址
0x00 偏移地址
&cntlwd 从站信息变量
NULL
ec_pdo_entry_reg_t domainServoInput_regs[] = {
{asda_Pos0, asda, 0x6064, 0x00, &actpos, NULL},
{asda_Pos0, asda, 0x6041, 0x00, &status, NULL},
{asda_Pos0, asda, 0x6061, 0x00, &modes_of_operation_display[0], NULL},
{asda_Pos0, asda, 0x603f, 0x00, &errcode, NULL},
{}};
//读操作状态字注册
ecrt_domain_reg_pdo_entry_list(domainServoOutput, domainServoOutput_regs)
ecrt_domain_reg_pdo_entry_list(domainServoInput, domainServoInput_regs)
//参数为:数据域指针,PDO入口注册信息列表
//这里将 OUTPUT PDO 和 INPUT PDO 分开成了两个域,分别注册成domainServoOutput和domainServoInput两个域,方便读写操作;
static uint8_t *domainOutput_pd = NULL;
static uint8_t *domainInput_pd = NULL; //定义数据域指针
domainOutput_pd = ecrt_domain_data(domainServoOutput)
domainInput_pd = ecrt_domain_data(domainServoInput)
//调用 ecrt_domain_data(),得到数据域的过程数据指针,为数据域指针分配地址,准备实时访问数据域
//数据域是 EtherCAT 过程数据(PDO)向程序中的数据结构的映射,它提供了用户程序对总线上各个从站进行数据访问的入口。当从站 PDO 入口注册成功后,不同从站都将获得一个属于自己的地址偏移量,用户可通过“数据域过程数据指针 + 地址偏移量”的方法对所需 PDO 进行读写操作。
//在读取写入的时候使用各自的数据域过程数据指针+偏移地址(例如cntlwd,errcode)对PDO进行操作
例:
EC_READ_U16(domainInput_pd + status);
8.到这里,PDO的配置就完成了,接下来是根据伺服电机的说明手册对PDO映射表中对应的字节进行读写
对PDO中的地址进行读写操作使用的函数为:
EC_READ_U16("数据域指针 + 地址偏移量")
EC_WRITE_U16("数据域指针 + 地址偏移量")
U32,U16,U8为要读取的字节宽度,EC_READ_U8()则是读取8 bite宽度的数据
例:
EC_READ_U16(domainInput_pd + Status)
domainInput_pd为数据域过程数据指针,Status为地址偏移量
查阅手册得知驱动器必须按照标准 DS402 协议规定的流程引导伺服驱动器,伺服驱动器才可运行于指定的状态,具体流程如下:
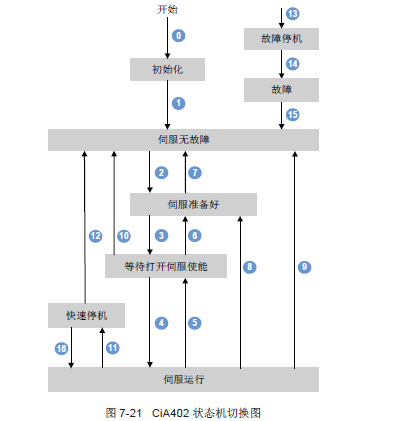
各个状态的说明:
| 初始化 | 驱动器初始化、内部自检已经完成。驱动器的参数不能设置,也不能执行驱动功能。 |
|---|---|
| 伺服无故障 | 伺服驱动器无故障或错误已排除。驱动器参数可以设置 |
| 伺服准备好 | 伺服驱动器已准备好。驱动器参数可以设置。 |
| 等待打开伺服使能 | 伺服驱动器等待打开伺服使能。驱动器参数可以设置。 |
| 伺服运行 | 驱动器正常运行,已使能某一伺服运行模式,电机已通电,指令不为0 时,电机旋转。驱动器参数属性为“运行更改”的可以设置,其他不可。 |
| 快速停机 | 快速停机功能被激活,驱动器正在执行快速停机功能。驱动器参数属性为“运行更改”的可以设置,其他不可。 |
| 故障停机 | 驱动器发生故障,正在执行故障停机过程中。驱动器参数属性为“运行更改”的可以设置,其他不可。 |
| 故障 | 故障停机完成,所有驱动功能均被禁止,同时允许更改驱动器参数以便排除故障。 |
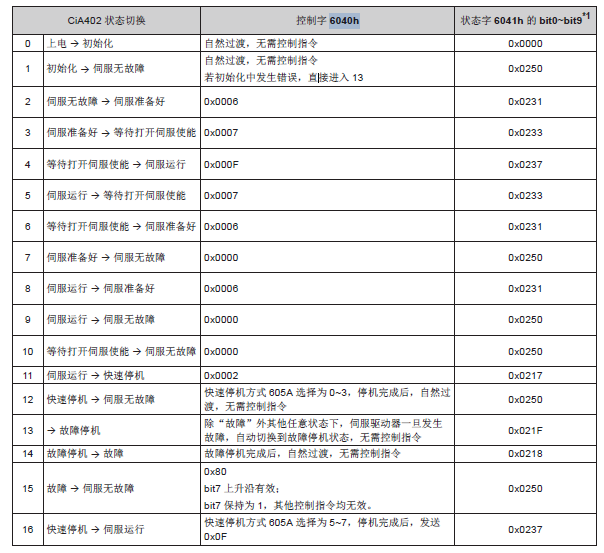
启动的流程为:向6040PDO中依次写入6-7-15(要根据6041状态字反馈信号依次写入,经过实践表明不建议直接按字节校验状态,简易按位校验状态,因为可能其他位出现正常变化会导致字节不同,建议直接判断位的状态)
(EC_READ_U16(domainInput_pd + status[i]) & 0x031) == 49
| 序号 | 描述 | 6040控制字 | 6041位状态 |
|---|---|---|---|
| 2 | 伺服无故障 伺服准备好 | 0x0006 | 0010 0011 0001(b) |
| 3 | 伺服准备好 等待打开伺服使能 | 0x0007 | 0010 0011 0011(b) |
| 4 | 等待打开伺服使能 伺服运行 | 0x000F | 0100 0011 0011(b) |
示例程序如下:
if ((cur_status[i] & 0x0250) == 592)
{
printf("*********************Servo Power on*********************\n");
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x06);
}
if ((cur_status[i] & 0x031) == 49)
{
if ((cur_status[i] & 0x033) == 51)
{
if ((cur_status[i] & 0x0433) == 1075)
{
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x1f);
}
else
{
printf("*********************Servo Waitting*********************\n");
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x0f);
}
}
else
{
printf("*********************Servo Enable*********************\n");
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x07);
}
}
}
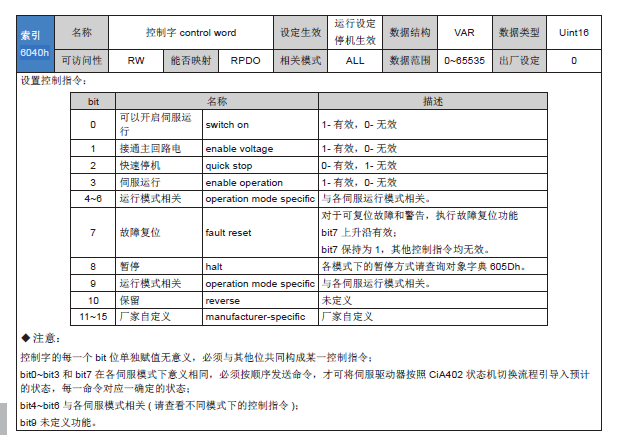
6040控制字寄存器各个位描述
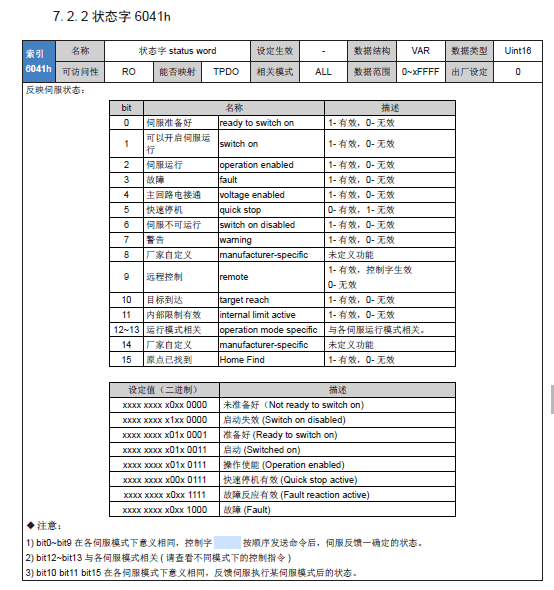
6041状态字寄存器各个位描述
这一小节的内容引用了燕骏博客的汇川IS620N伺服CIA402状态机切换步骤-6040控制字及6041状态字描述这篇文章,在此致谢!
9.到这里对于伺服电机的配置就基本完成了,但是在实际测试的时候我们发现:
当程序没有正常结束(手动Ctrl+c关闭),或者程序结束后没有使电机进入等待状态,后面再进行操作的时候电机就会没有反应(除非断电对伺服电机重新上电),这种情况是因为电机产生了fault,也就是6041h状态字的3号位会为1,这种情况下电机是不会工作的,这时我们就需要清除故障,也就是对6040h的7号位置1,然后重新使能,这样电机就会进入正常的工作;
cur_status = EC_READ_U16(domainInput_pd + status);
if (EC_READ_U16(domainInput_pd + errcode) != 0 || (cur_status & 0x0008))
{
printf("Error Capture:servo %d error\n", i); for (int i = 0; i < drive_count; i++)
{
if (EC_READ_U16(domainInput_pd + errcode[i]) != 0 || (cur_status[i] & 0x0008))
{
EC_WRITE_U16(domainOutput_pd + cntlwd[i], (EC_READ_U16(domainOutput_pd + cntlwd[i]) | 0x0080));
}
else
{
EC_WRITE_U16(domainOutput_pd + cntlwd[i], (EC_READ_U16(domainOutput_pd + cntlwd[i]) & 0xff7f));
}
} if ((cur_status[i] & 0x031) == 49)
{
if ((cur_status[i] & 0x033) == 51)
{
if ((cur_status[i] & 0x0433) == 1075)
{
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x1f); }
else
{
printf("33\n");
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x0f);
}
}
else
{
printf("31\n");
EC_WRITE_U16(domainOutput_pd + cntlwd[i], 0x07);
}
}
printf("Error Solved!!!!\n");
}
4、变频器驱动配置要点
这次我们使用的是欧姆龙的3G3MX2型变频器搭配ECT型Ethercat选配件作为从站
.jpg)
1.硬件上的设置:在硬件上需要对A001和A002进行设置,以保证正常通信,具体内容如下:
A001 = 04 频率给定选择,04 = 选配件
A002 = 04 运行指令选择,04 = 选配件
A003 = 50 基准频率 = 50Hz,电机额定频率
A004 = 60Hz 最大频率 = 60Hz
A044 = 00 控制方式,00 = 恒转矩
A061 = 60Hz 频率上限
A062 = 0Hz 频率下限
F002 = 2 加速时间,2s
F003 = 2 减速时间,2s
F004 = 00 运转方向,00 = 正向,01 = 反向
H003 = 0.55 电机容量 = 0.55kW
2.PDO配置:
Command(5000h) 控制启停及正反转
Frequency Reference(5010h) 运行频率给定
Status(5100h) 变频器运行状态
Output frequency monitor(5110h) 变频器频率输出监控
3.操作字及状态字位含义
5000h:电机启动、正反转、复位
.jpg)
5010h: 频率给定,直接给一个hex值
5100h:变频器状态反馈
.jpg)
5110h:变频器频率反馈->hex值
4.注意!!
- 变频器操作顺序:5000h = 0x0 -> 5010h = '频率16进制' -> 5000h = 0x1
就是说,必须先给命令字置0,然后给频率,最后命令字置1启动
EC_WRITE_U16(domainOutput_pd + ECT_Command, 0);
EC_WRITE_U16(domainOutput_pd + ECT_Frequency, ECTFrequency);
EC_WRITE_U16(domainOutput_pd + ECT_Command, 0x1);
变频器和伺服器一样,在程序没有正常运行完就关闭,会产生fault,5100h的第三位会为 1,这时候同样需要清除错误,相比来说变频器清楚错误就简单一些,只需要将变频器的第 7 位置 1 就可以,然后再操作便可以正常;
if (EC_READ_U16(domainInput_pd + ECT_Status) & 0x8)
{
EC_WRITE_U16(domainOutput_pd + ECT_Command, 0x80);
}
以上就是IGH_Master应用程序驱动伺服和变频器的操作步骤和可能遇到的问题,在进行工业领域的设计操作时,设备的手册一定是重中之重,还是要多看手册。
本文参考了很多网上资料,对主要参考资料都进行了标注,还有一些可能未进行标注,在此一并感谢!
IGH_Master主站配置驱动伺服电机和变频器总结的更多相关文章
- visual studio 2010配置驱动开发环境
visual studio 2010 配置驱动开发环境 ** 工具/材料 VS2010.WDK开发包 ** 配置过程 以下将讲述VS2010驱动开发环境的配置过程,至于必要软件的安装过程这里不再赘述 ...
- nxlog4go 的配置驱动
刚开始接触log4go项目时,没有注意到配置的重要性. 阅读了log4j.log4net.log4cpp.log4cplus的部分代码,发现它们都是以xml配置来驱动日志系统运行的. 多个源文件共享一 ...
- [内核编程] visual studio 2010配置驱动开发环境
visual studio 2010 配置驱动开发环境 ** 工具/材料 VS2010.WDK开发包 ** 配置过程 以下将讲述VS2010驱动开发环境的配置过程,至于必要软件的安装过程这里不再赘述 ...
- Ubuntu server16.04安装配置驱动418.87、cuda10.1、cudnn7.6.4.38、anaconda、pytorch超详细解决
目录 安装GCC 安装NVIDIA驱动 1. 卸载原有驱动(没装跳过) 2. 禁用nouveau 3. 安装NVIDIA显卡驱动 安装CUDA10.1 安装cudnn 安装anaconda 安装ten ...
- WINDOWS7(vs2012+wdk7.6) 配置驱动开发环境
合肥程序员群:49313181. 合肥实名程序员群:128131462 (不愿透露姓名和信息者勿加入) Q Q:408365330 E-Mail:egojit@qq.com 1.新建C ...
- Vs2010 配置驱动的开发环境
我已被用来VS2010开发环境,之前曾经与vs2010驱动的开发环境.重装系统,一次又一次的配置,找了好几篇文章,配置没有成功,在配置阶段突然成功了,直接把原来的驱动程序的配置文件将能够接管使用. 当 ...
- VS2005、vs2008+WinXPDDK+DDKWizard配置驱动开发环境
所需软件下载地址如下(均为有效资源链接,速度都比较可以): vs2005: http://221.224.22.210/downloadsawyer/VS.Net2005简体中文版.rar wi ...
- win7+vs2010配置驱动开发环境(问题种种版...)
本来按照这个来做,能跑通helloworld,可是复杂的驱动就会出错....不知道什么原因,后来就直接用命令行来编译的. -------------------------------------- ...
- 灵动微电子ARM Cortex M0 MM32F0010 GPIO 的配置驱动LED灯
灵动微电子ARM Cortex M0 MM32F0010 GPIO的配置 目录: 1.前言 2.学习方法简要说明 3.要点提示 4.注意事项 5.MM32F0010系统时钟的配置 6.MM32F001 ...
随机推荐
- Windows快捷键与Dos命令学习
部分Windows常用快捷键 复制:Ctrl + C 粘贴:Ctrl + V 全选:Ctrl + A 剪切:Ctrl + X 撤销:Ctrl + Z 保存:Ctrl + S 关闭窗口:Alt + F4 ...
- MySQL数据库基础-3
SQL语言 结构化的查询云烟 有国际标准. 非常容易学习的,关注数据本身,类似于shell SQL解释器 命令行效率比较高 应用编程接口 ODBC:Open Database Connectivity ...
- Codeforces Round 662 赛后解题报告(A-E2)
Codeforces Round 662 赛后解题报告 梦幻开局到1400+的悲惨故事 A. Rainbow Dash, Fluttershy and Chess Coloring 这个题很简单,我们 ...
- python坐标获取经纬度或经纬度获取坐标免费模块--geopy
一.官方文档 https://github.com/geopy/geopy 二.模块安装 pip3 install geopy 三.简单实用 from geopy.geocoders import N ...
- ret2libc--ROP(pwn)漏洞入门分析
背景知识 fflush 函数,清理缓冲区. fflush(stdout) 一次性输出以上缓冲区所有数据 read(0,&buf,0xAu) 0代表标准输入,标准输出1,标准错误2,&b ...
- h5 语义话标签的意义
使用语义话标签的意义 语义类标签对开发者更为友好,使用语义类标签增强了可读性,即便是在没有 CSS 的时 候,开发者也能够清晰地看出网页的结构,也更为便于团队的开发和维护. 除了对人类友好之外,语义类 ...
- AngularJS——ui-router
深究AngularJS--ui-router详解 原创 2016年07月26日 13:45:14 标签: angularjs / ui-router / ui-view 25043 1.配置使用ui- ...
- Codeforces Round #679 (Div. 2, based on Technocup 2021 Elimination Round 1)
考场上只做出来四道,第二天一早就写出来了E,蛮绝望的. A Finding Sasuke 水构造 #include <cstdio> #include <algorithm> ...
- java安全编码指南之:序列化Serialization
目录 简介 序列化简介 注意serialVersionUID writeObject和readObject readResolve和writeReplace 不要序列化内部类 如果类中有自定义变量,那 ...
- pip intsall 遇到的各种问题
一.pip install 安装指定版本的包 要用pip 安装指定版本的python的包,只需要通过 == 操作符指定. pip install robotframework == 2.8.7 将安装 ...