Finding Lane Lines on the Road
Finding Lane Lines on the Road
The goals / steps of this project are the following:
- Make a pipeline that finds lane lines on the road
- Reflect on your work in a written report
Reflection
1. Describe your pipeline. As part of the description, explain how you modified the draw_lines() function.
My pipeline consisted of 5 steps. First, I got a image-copy and converted the images to grayscale:
Then I used gauss blur to reduce the noise point
At first ,the kernel size I’v been used was 5,but there was still have some noise point so I turned it to 7.
The next step is to get the region of interest I used function as blew

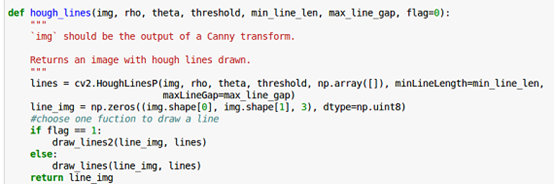
Then I use houg_lines function to find lines , and combine two image together.

In order to draw segmented or solid line I change the hough_lines function , adding a parameter flag like the code blew. When the flag eques 1 , the function use the draw_lines2() which is I modified the draw_lines().
In the draw_lines2() function ,I use slope to distinguish between left and right. If the slope was greater than 0.5 it might be the right line. And if it less than -0.5 I consider it belongs to left. The slope in the [-0.5,0.5] , for example slope == 0, are wrong numbers .
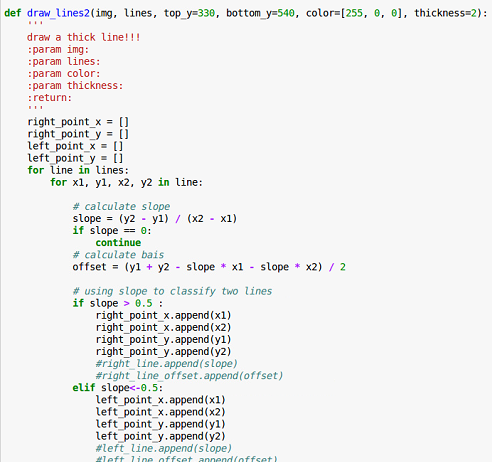
Knowing slope and bias can I calculate x for any y that I know, and with the two point which are at the beginning and the end of the line I can draw a single line segment. So , at first, the average of slope and bias was used . but in some frame it might not work well . The other problem is the line shook in the videos. Then I use the np.ployfit() to find the slope and bias in draw_lines2 function.

It works well in the single frame ,but it still shook as if they were been struck by an earthquake! I’m very upset…….T^T
But life goes on.
Finally I got two ideas. I write them in function find_top_and bottom_point()

In this function I use two ways to make the bias and slope robust. One way is using two global queues with max-length of 5 to save the past 4 frames' bias and slope and bias. The current slope is the average of the past 4 and 1 current frames. The current bias is the same
Other way is to use the old and new slopes combining to generate the slope. The Formula is globlas_slope * 0.4 + slope * 0.6 .The globlas_slope was the one in the previous fram.
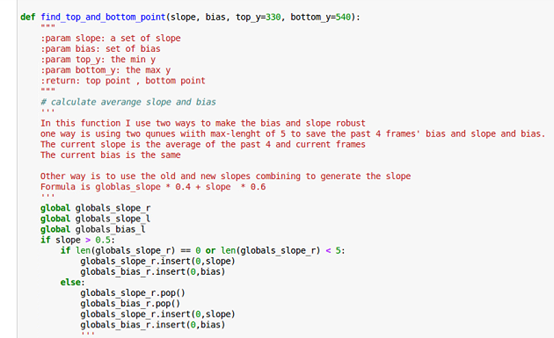

globals_slope_r and globlas_bias_r are lists used to record the slope and bias of adjacent 5 frames. globals_slope_l and globals_bias_l are float parameters to use the formula. Both of them work well.

The right was using formula and the left line using the queue. I think using queue is better than using formula . It was more robust.
2. Identify potential shortcomings with your current pipeline
I think there are many shortcomings in my curruet pipeline.
First of all, the worst one is that can not work well with the challenge! There are many noise point in the challenge. So when I use hough_lines() function to find the line it show many short line that are’t the lane line.The solution I will talk in next part.
Another potential shortcoming would be that many parameters were fixed. This will cause the program to fail in many case: the lane Line region changed, the illumination changed ,the road may white also ,there is a car in the font and so on……..
3. Suggest possible improvements to your pipeline
A possible improvement would be to use color_select. In challenge , only few objects were in the white or yellow. If I use it, I think it may reduce many noise points.
I think I can use contours to reduce some miss-finding. The line area size may in an interval of one scense.
Finding Lane Lines on the Road的更多相关文章
- Road Construction
King Mercer is the king of ACM kingdom. There are one capital and some cities in his kingdom. Amazin ...
- when|nobody|hazard|lane|circuit|
How can I help them they won't listen to me? 题目解析 考查从句.此句意为:如果他们要是不听我的话,我怎么帮助他们?此处,when引导的状语从句表示假设事 ...
- MDX函数(官方顺序,带示例)
MDX函数(官方顺序) 1. AddCalculatedMembers (MDX) 返回通过将计算成员添加到指定集而生成的集. 语法: AddCalculatedMembers(Set_Expres ...
- poj 1724:ROADS(DFS + 剪枝)
ROADS Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 10777 Accepted: 3961 Descriptio ...
- Codeforces Round #212 (Div. 2) D. Fools and Foolproof Roads 并查集+优先队列
D. Fools and Foolproof Roads You must have heard all about the Foolland on your Geography lessons. ...
- openjudge ROADS
726:ROADS 总时间限制: 1000ms 内存限制: 65536kB 描述 N cities named with numbers 1 ... N are connected with one- ...
- 深搜+剪枝 POJ 1724 ROADS
POJ 1724 ROADS Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 12766 Accepted: 4722 D ...
- 多次访问节点的DFS POJ 3411 Paid Roads
POJ 3411 Paid Roads Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6553 Accepted: 24 ...
- ROADS
ROADS Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 11977 Accepted: 4429 Description N ...
随机推荐
- jenkins持续集成(windows slave+svn+.net)
一.Windows slave配置 1.系统管理->节点管理->新建节点 2.节点列表中点击新增的节点名称按提示下载agent.jar, 在windows slave机器执行(copy页面 ...
- vue去掉链接中的#
在router.js中修改, const router = new VueRouter({ mode: 'history', routes: [...] })
- 创建安全的 Netty 程序
1.使用 SSL/TLS 创建安全的 Netty 程序 SSL 和 TLS 是众所周知的标准和分层的协议,它们可以确保数据时私有的 Netty提供了SSLHandler对网络数据进行加密 使用Http ...
- 2.4容错保护:Hystrix
在ribbon使用断路器 改造serice-ribbon 工程的代码,首先在pox.xml文件中加入spring-cloud-starter-hystrix的起步依赖: 引入 <dependen ...
- pycharm配置git版本管理
1.下载并安装git 首先你电脑必须安装git版本控制器(软件),在官网下载即可 2.安装git,正常安装即可 编缉器的选择,根据电脑实际情况选择合适的编缉器 安装参考:https://www.cnb ...
- 坦克大战--Java类型
写在前面 Java编译器下载教程(真的良心):https://blog.csdn.net/Haidaiya/article/details/81230636 本项目为本人独自制作,请各位尊 ...
- python 自动化测试
安装selenium 安装命令: pip install selenium 测试 打开一款Python编辑器,默认Python自带的IDLE也行.创建 baidu.py文件,输入以下内容: from ...
- vue页面顺序规范
// html模板<template> <div>因联vue页面规范</div></template><script> // 模块 ...
- springMVC接受json类型数据
springMVC接受json格式的数据很简单 使用@RequestBody 注解,标识从请求的body中取值 服务端示例代码 @RequestMapping(value = "/t4&qu ...
- 安卓开发之ArrayAdapter使用
package com.lidaochen.test; import android.support.v7.app.AppCompatActivity; import android.os.Bundl ...