【Semantic Segmentation】 Instance-sensitive Fully Convolutional Networks论文解析(转)
这篇文章比较简单,但还是不想写overview,转自: https://blog.csdn.net/zimenglan_sysu/article/details/52451098
另外,读这篇paper的时候,一直想不明白白一个问题,就是他分出了\(k^2\)个Instance-sensitive score maps,他是怎么训练的。。换句话说,ground truth是怎么弄的? 文章里只说了用logistics做损失函数,应该需要看代码,因为还没有搞分割的打算,先不详细了解代码。
Instance-sensitive Fully Convolutional Networks - eccv 2016
=====
论文地址:http://arxiv.org/abs/1603.08678
=====
一句话概括:
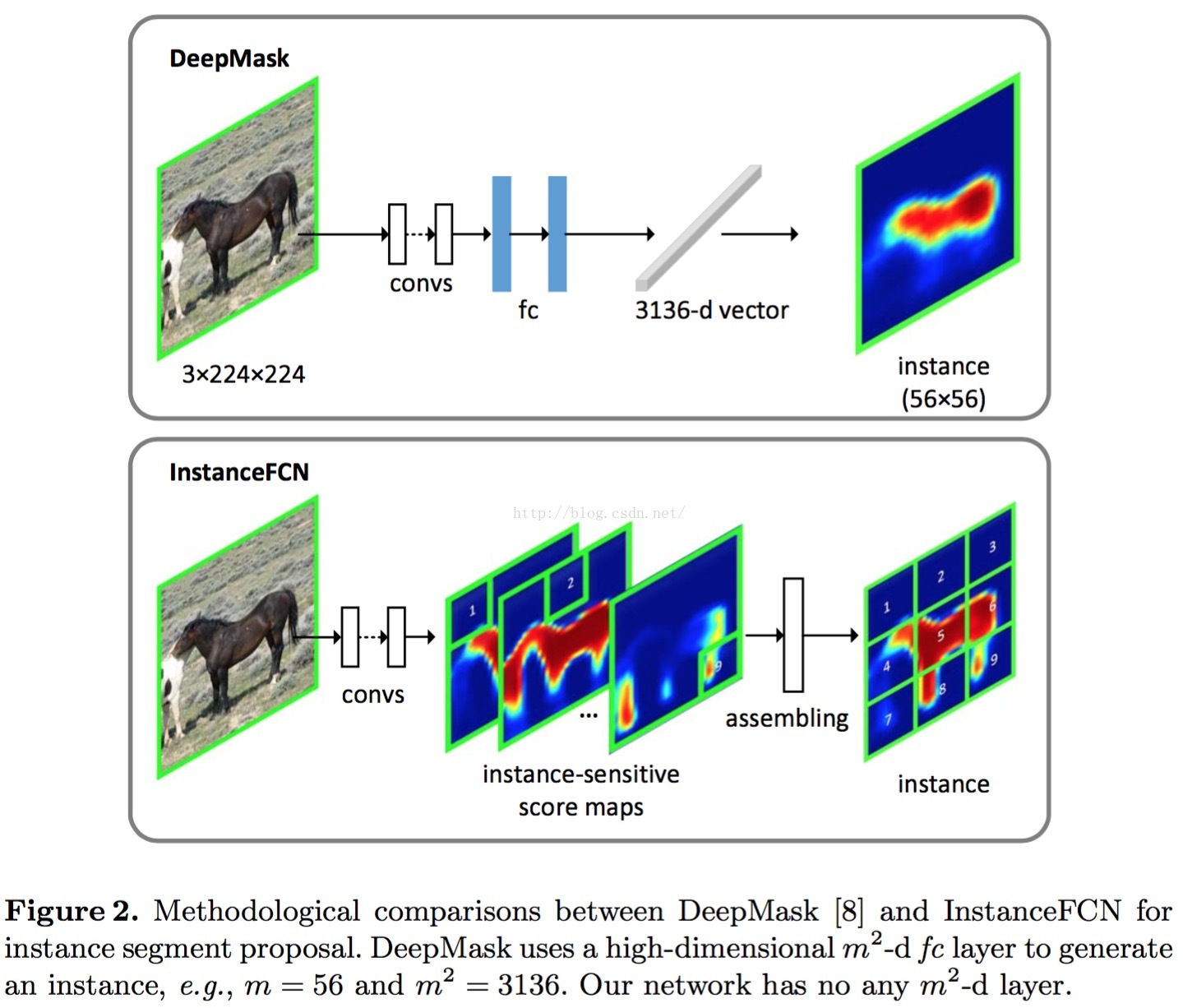
根据local coherence的特性,以sliding window的方式,利用FCN产生positive-sensitive的instance-level的segment proposal。
=====
framework
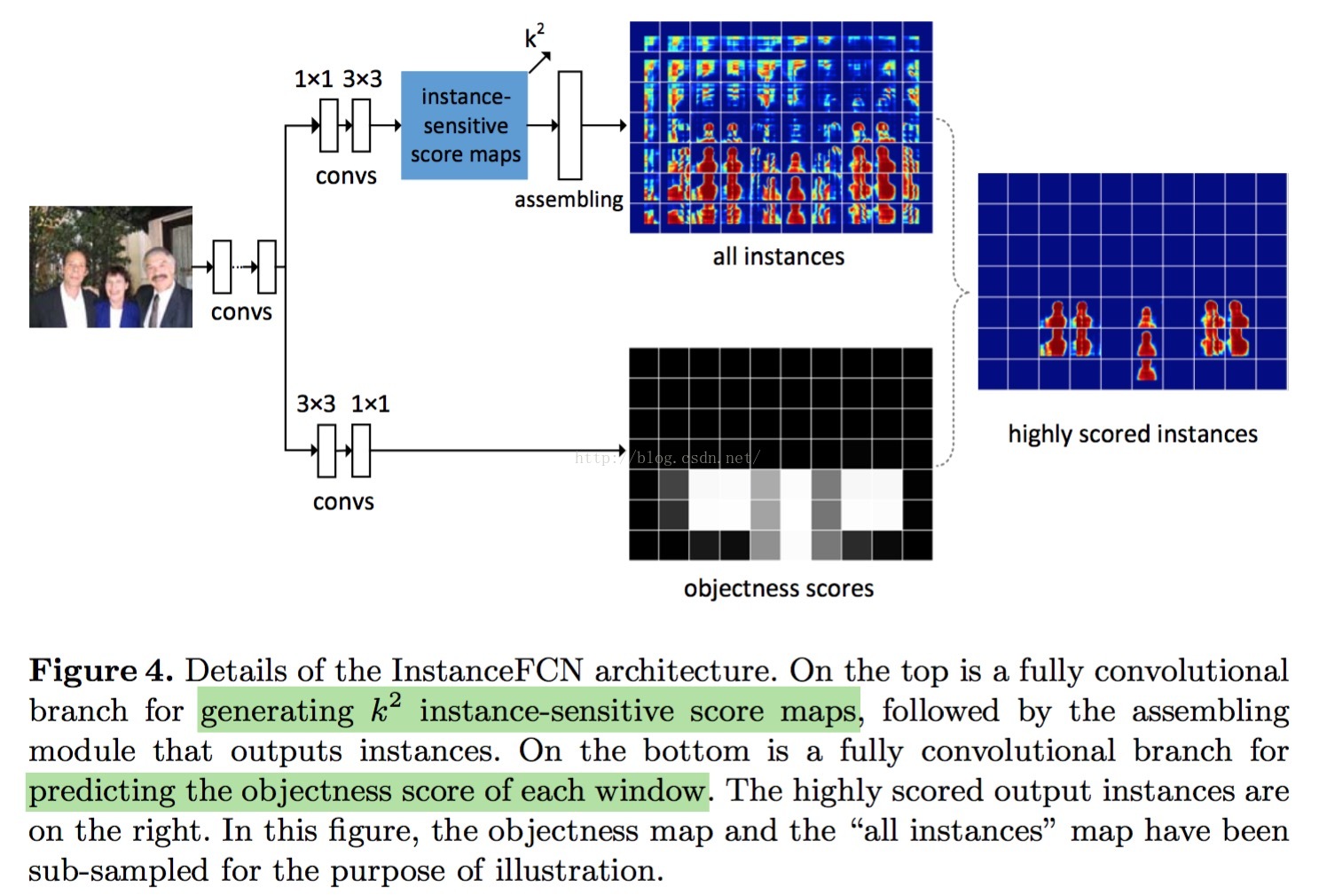
从上图可以看出,该network是一个full convolutional network(based on VGG16),除了feature extractor(VGG16的前13个conv layers)外,还有两个branches:
1 segment branch
该branch由1*1 conv,3*3 conv和一个assembling layer构成,后接segment的loss layer(采用logistic regression layer)
2 scoring branch
该branch由3*3 conv,1*1 conv构成,后接一个scoring的loss layer(采用logistic regression layer)
显然segment branch产生instance-level的segmentation mask,scoring branch对segment branch产生的instance mask进行打分。
(这里为objectness score,有点不明白为什么不是class-specific的)。
剩下的network architecture(VGG16-base)见下图:
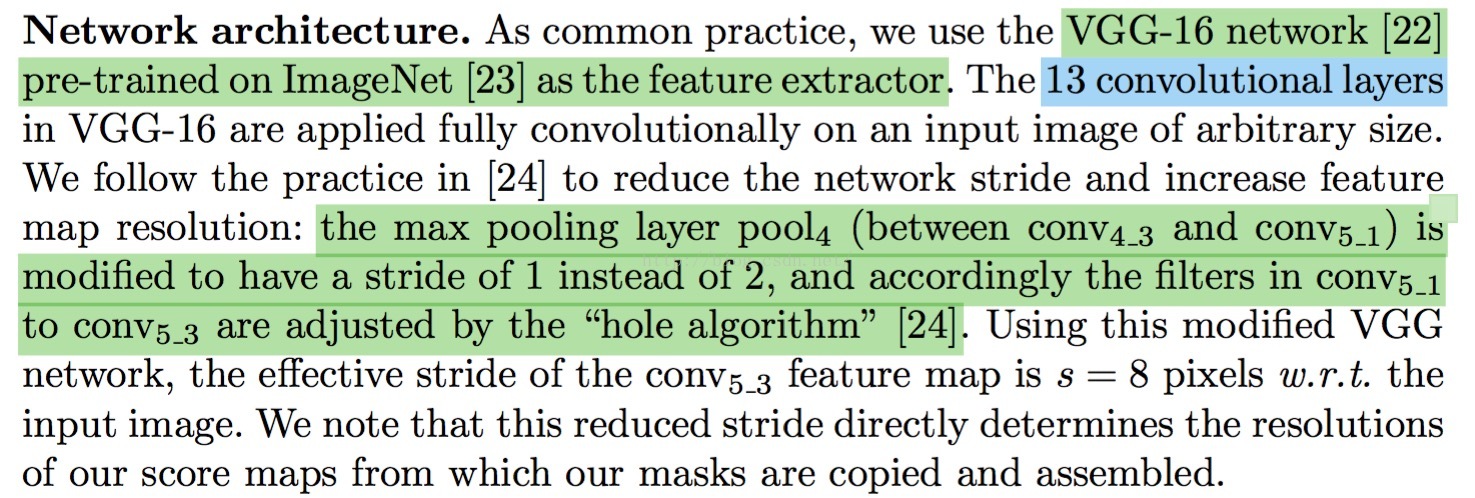
论文采用了hole algorithm来获取dense的feature map同时保持和原来VGG16的感受野大小。
=====
key module - assembling module
论文中的network(如上所述)是比较容易理解的,除了segment branch的assembling module。
先上图来个感性认识
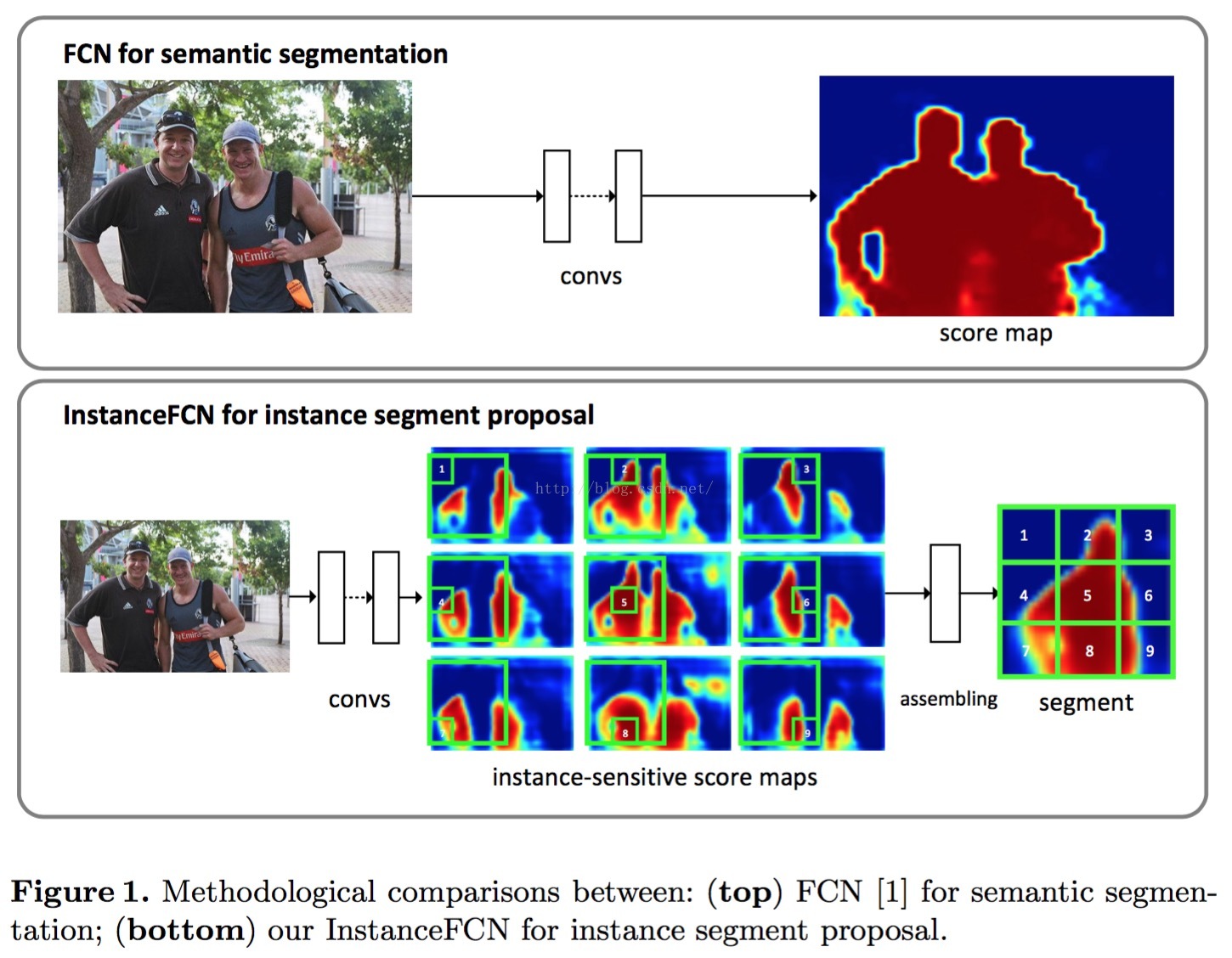
从上述三张图可以看出assembling module是如何工作的了,具体来说:
1 理解k^2 feature maps
由segment branch产生k^2个feature maps(或者理解为predicted masks),
这k^2 feature map编码了不同的位置信息,如top-left,top-center,……,bottom-right。
也就是每个feature map对应一个位置。
2 assembling -> producing instance-level mask
假如给定一个bounding box M(m*m大小),那么就可以将bounding box投影到k^2个feature map。
(类似RoIPooling)
将bounding box划分为k*k个bin,每个bin的大小为(m/k,m/k),
同理,bounding box投影到的feature map上的投影bounding boxes的
每个bounding box N_i (i=1,2, ...., k^2)也划分为k*k个bins。
这样M的每个bin K对应到第K个feature map上的N_k的bin K(刚好都是k^2)
那么对应的instance-level mask的输出为:同样为m*m大小,同样划分为k*k个bins
将第K个feature map上的N_k的bin K的feature values,拷贝到输出对应的bin K上。
(反向传播时,就是将对应的diff反过来拷贝过来就好)
说的有点绕口,但是它就是这么简单。
这里的输入bounding box并不是由proposal method产生的,而是论文作者以sliding window的方式
和指定bounding box的大小来产生的:
1 假设k^2的feature maps的大小为h和w,(同样对应的scoring branch的score map的大小也是h和w)
2 feature map上的每个pixel都产生一个bounding box,其大小为m*m,(论文里m=21)
3 每个pixel根据该bounding box
(已经是投影再feature map上的bounding box了,这个需要注意,而不是再从原图投影到feature map上),
输入其的instance-level的mask
4 这里的每个instance-level mask(一共w*h个)都由一个对应的objectness score,由scoring branch的score map给出
需要注意的是这里的w和h由个隐性的约束条件:h>=m, w>=m
=====
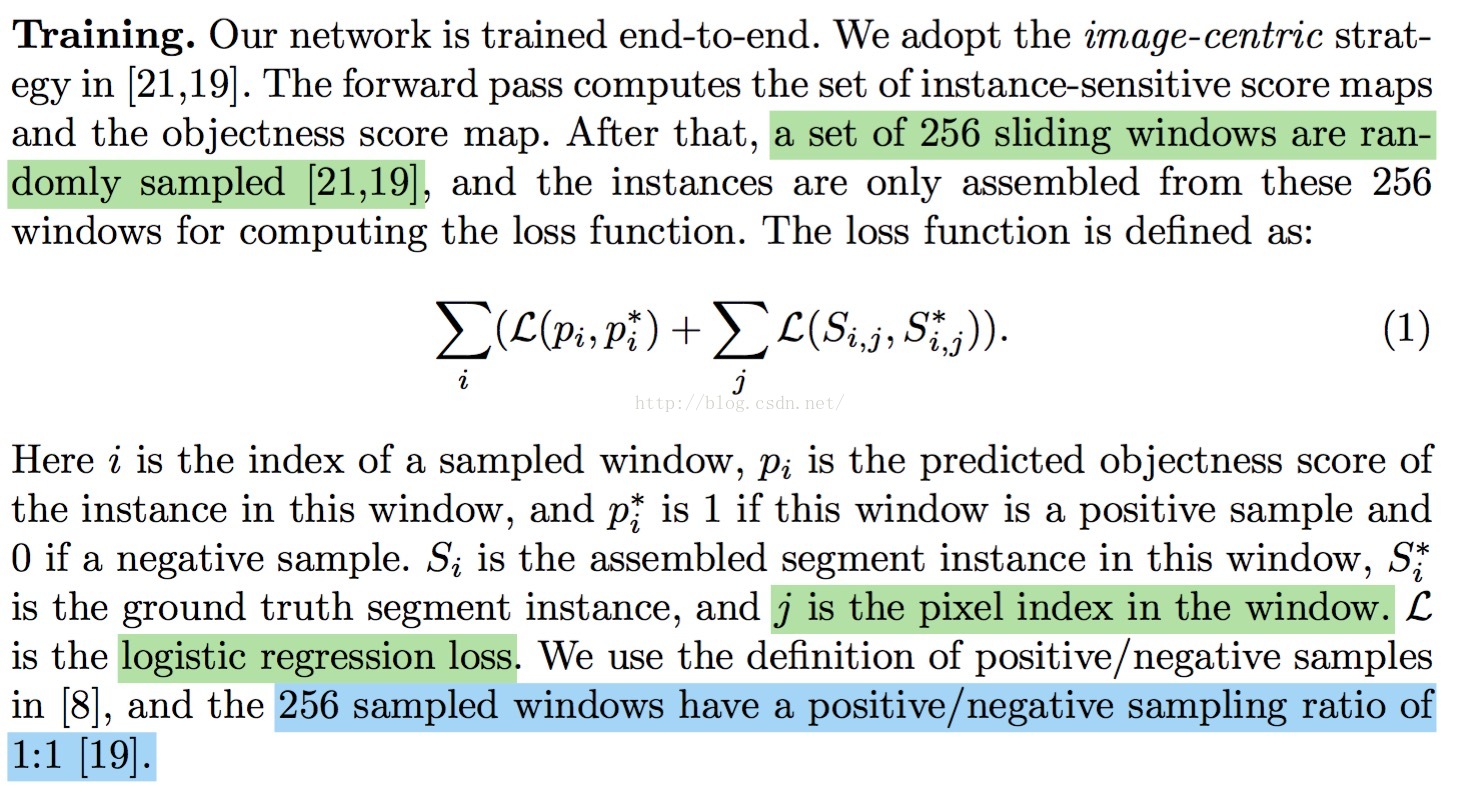
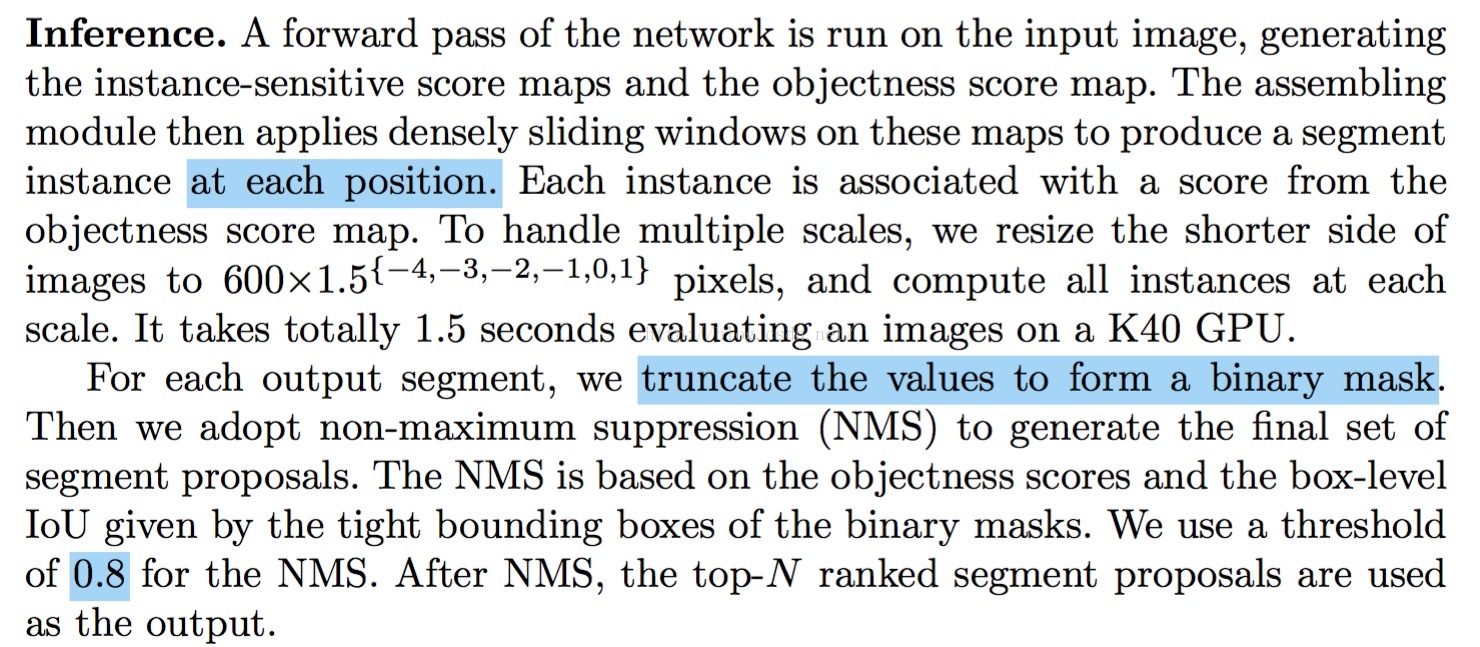
training & testing
那么论文是怎么training和testing的?还是直接看图(笔者直接截出来的)
=====
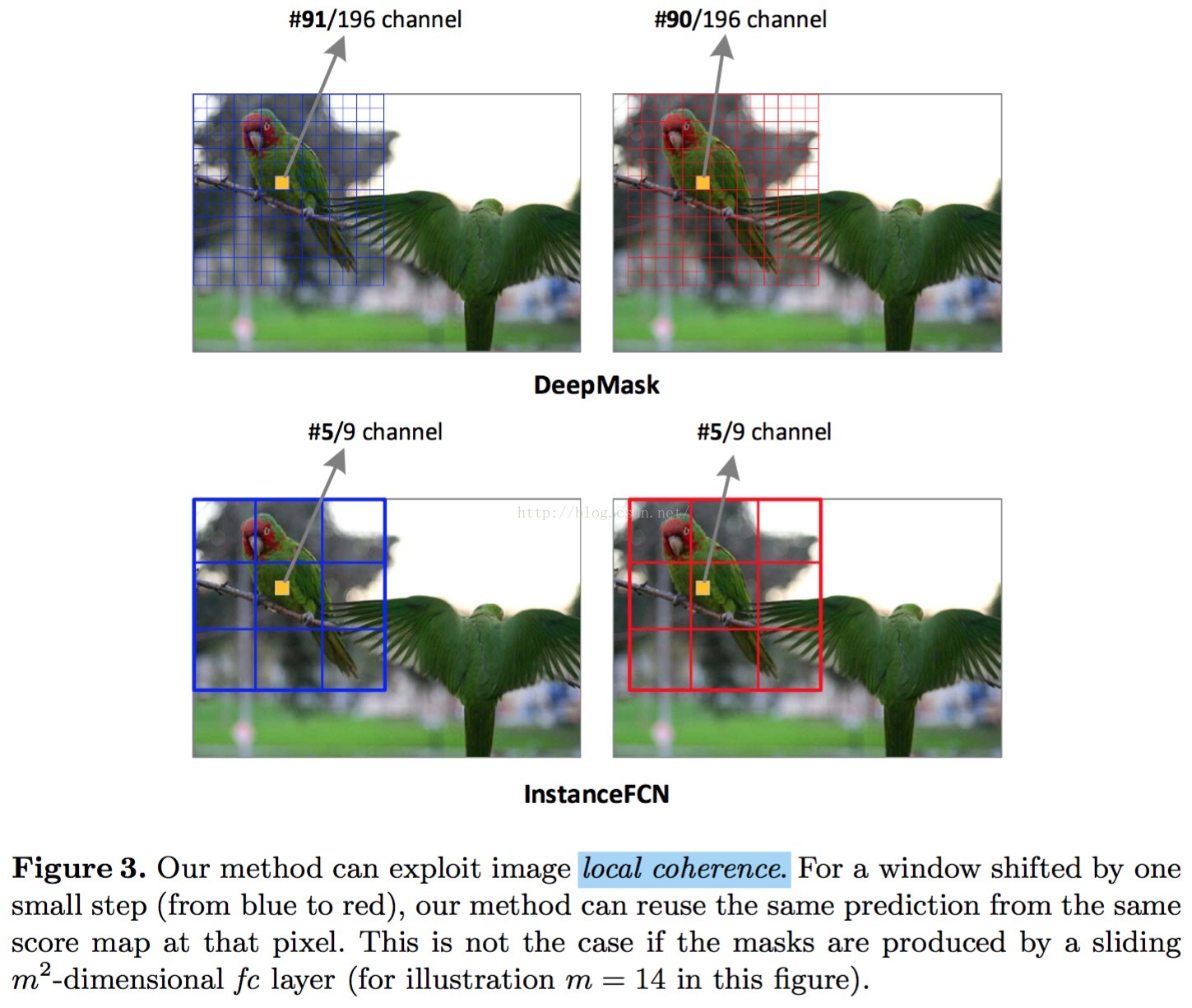
local coherence
嗯,直接看图,不说话

=====
与deepmask的对比
这个嘛,上面的local coherence已经说的很明白了,具体的请各位客官各自看论文和deepmask的论文
=====
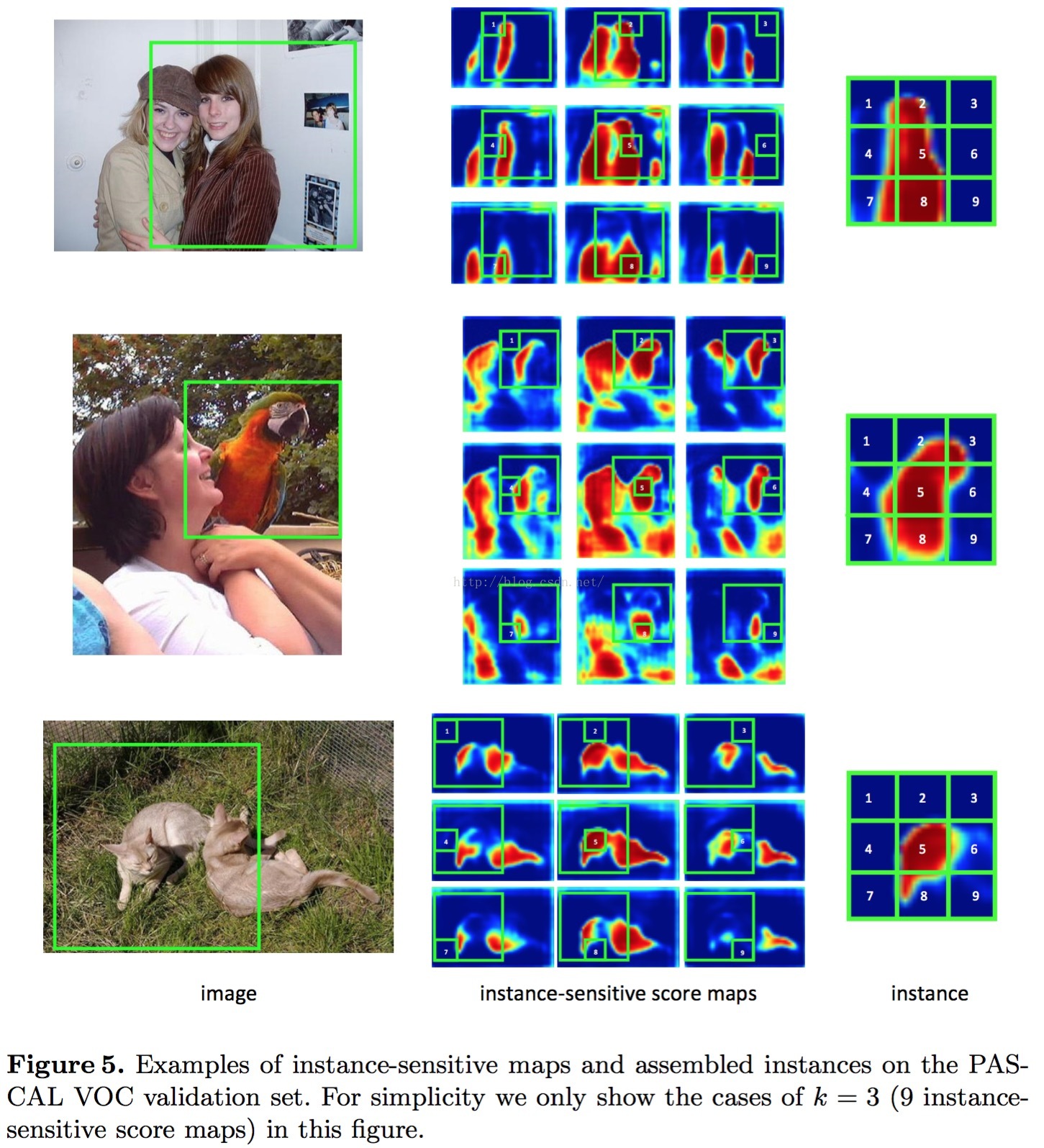
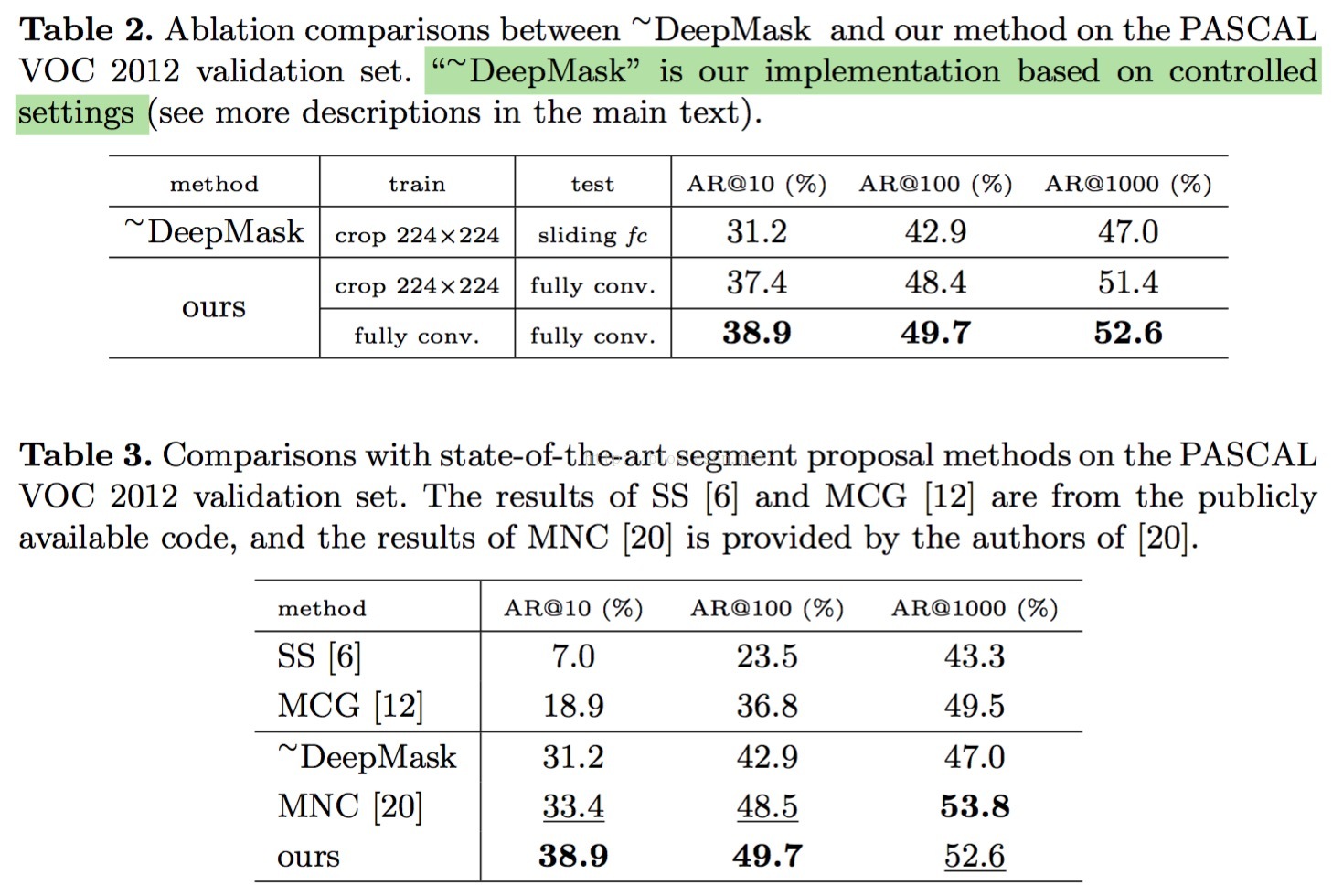
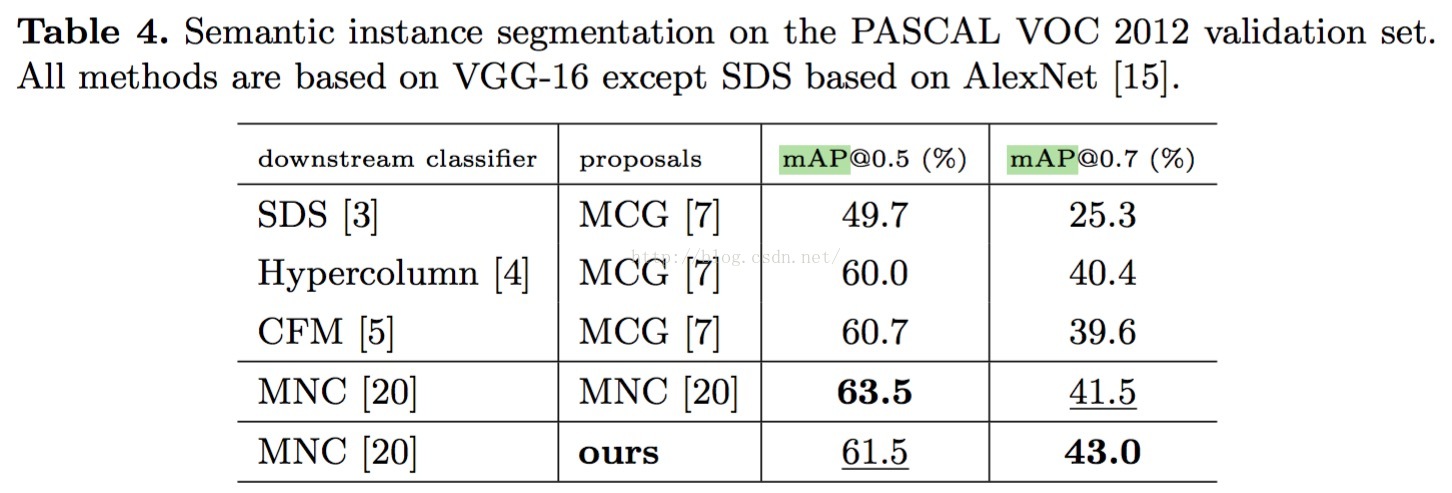
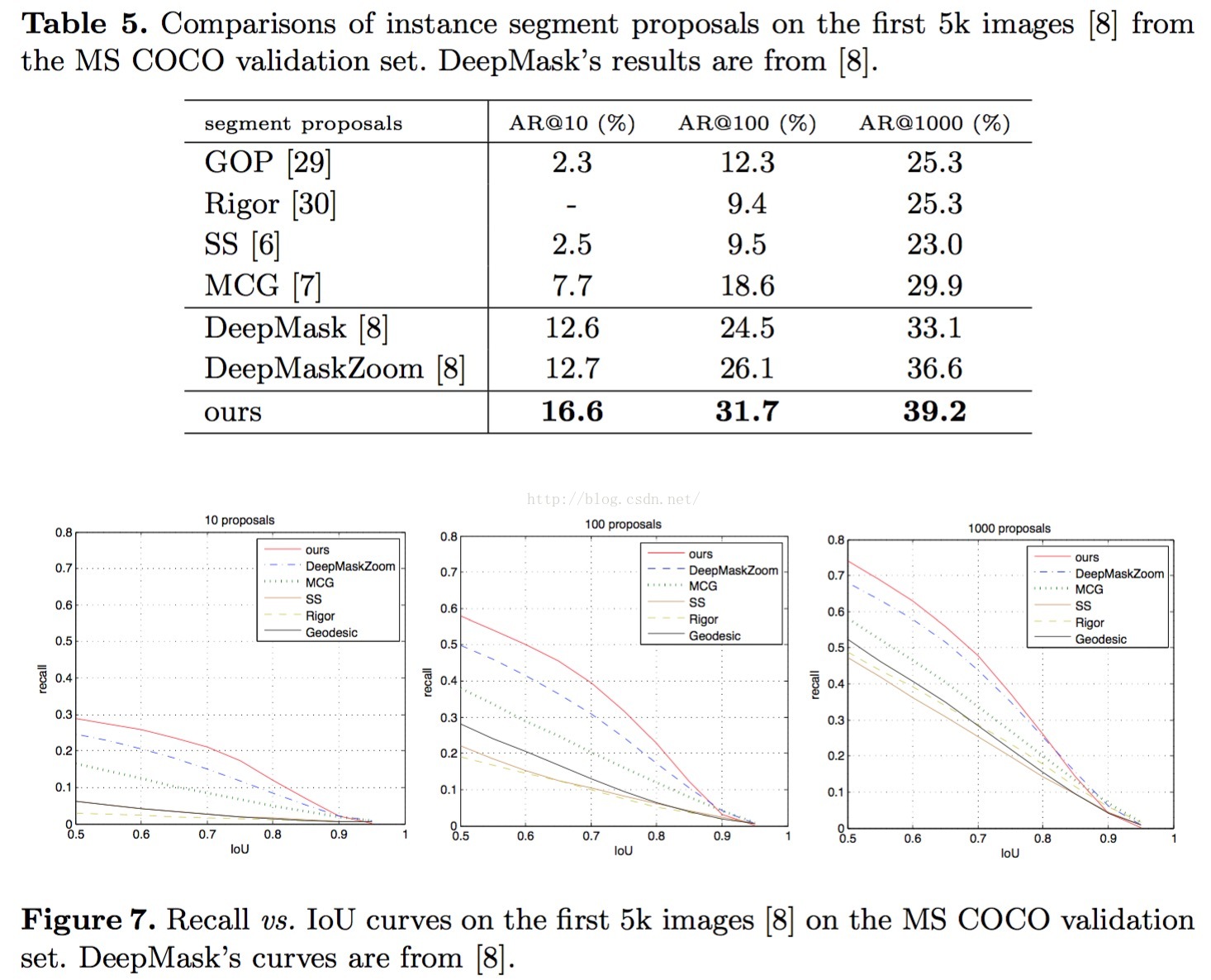
实验效果
嗯,直接看图,不说话
=====
总的来说,
整篇论文的思路很简单,但是效果就是好,复现也容易(但是,笔者还是坐等论文作者开源)
但是笔者有几处不是很明了,不知道哪位客官可以解答下:
1 branches的conv layer设计,为什么segment branch的为1*1,3*3,而scoring branch为3*3,1*1,为什么这样设计?
2 scoring branch的score为什么不是class-specific的而是objectness?
3 为什么不用proposal method的方式来产生bounding boxes?
4 训练segment branch时,是如何为每个predicted instance-level的mask分配对应的ground-truth?
5 为什么不用在论文作者的另外一篇论文上:Instance-aware Semantic Segmentation via Multi-task Network Cascades
笔者在此多谢喇!
欢迎前来探讨!

=====
如果这篇博文对你有帮助,可否赏笔者喝杯奶茶?

【Semantic Segmentation】 Instance-sensitive Fully Convolutional Networks论文解析(转)的更多相关文章
- 【Detection】R-FCN: Object Detection via Region-based Fully Convolutional Networks论文分析
目录 0. Paper link 1. Overview 2. position-sensitive score maps 2.1 Background 2.2 position-sensitive ...
- 【Network Architecture】Densely Connected Convolutional Networks 论文解析
目录 0. Paper link 1. Overview 2. DenseNet Architecture 2.1 Analogy to ResNet 2.2 Composite function 2 ...
- 论文学习:Fully Convolutional Networks for Semantic Segmentation
发表于2015年这篇<Fully Convolutional Networks for Semantic Segmentation>在图像语义分割领域举足轻重. 1 CNN 与 FCN 通 ...
- Fully Convolutional Networks for Semantic Segmentation 译文
Fully Convolutional Networks for Semantic Segmentation 译文 Abstract Convolutional networks are powe ...
- 论文笔记之:Visual Tracking with Fully Convolutional Networks
论文笔记之:Visual Tracking with Fully Convolutional Networks ICCV 2015 CUHK 本文利用 FCN 来做跟踪问题,但开篇就提到并非将其看做 ...
- 论文阅读(Xiang Bai——【CVPR2016】Multi-Oriented Text Detection with Fully Convolutional Networks)
Xiang Bai--[CVPR2016]Multi-Oriented Text Detection with Fully Convolutional Networks 目录 作者和相关链接 方法概括 ...
- 中文版 R-FCN: Object Detection via Region-based Fully Convolutional Networks
R-FCN: Object Detection via Region-based Fully Convolutional Networks 摘要 我们提出了基于区域的全卷积网络,以实现准确和高效的目标 ...
- 『计算机视觉』R-FCN:Object Detection via Region-based Fully Convolutional Networks
一.网络介绍 参考文章:R-FCN详解 论文地址:Object Detection via Region-based Fully Convolutional Networks R-FCN是Faster ...
- 全卷积网络Fully Convolutional Networks (FCN)实战
全卷积网络Fully Convolutional Networks (FCN)实战 使用图像中的每个像素进行类别预测的语义分割.全卷积网络(FCN)使用卷积神经网络将图像像素转换为像素类别.与之前介绍 ...
随机推荐
- Bootstrap插件架构 基于元素自定义属性的布局规则
w HTML布局规则 Javascript实现步骤 插件调用方法
- php+nginx上传文件配置
- PHP 创建中文目录的情况
因为一个作业需要创建一些中文的目录,其实主要还是考虑一下编码问题. 首先确认下系统环境是什么编码,如果是gbk或者GB2312那就需要转下码,还有些特殊字符,就需要有个特殊的写法. iconv('UT ...
- shell 从文件中读取批量文件名并做命令行操作
222文件内容: /home/zhangsuosheng/Desktop/9-30/9_30/1bak/1538291162.png /home/zhangsuosheng/Desktop/9-30/ ...
- opencv 角点检测+相机标定+去畸变+重投影误差计算
https://blog.csdn.net/u010128736/article/details/52875137 https://blog.csdn.net/h532600610/article/d ...
- sql server动态行列转换
原文链接:https://www.cnblogs.com/gaizai/p/3753296.html sql server动态行列转换 一.本文所涉及的内容(Contents) 本文所涉及的内容(Co ...
- c#中params关键字应用
c#params应用 params 是C#开发语言中关键字, params主要的用处是在给函数传参数的时候用,就是当函数的参数不固定的时候. 在方法声明中的 params 关键字之后不允许任何其他参数 ...
- 001-mac使用桌面、Dock、键盘、程序安装
一.桌面 Finder:dock第一个正方形蓝白笑脸,类似于Windows的资源管理器,是图形化界面基础,默认启动 菜单:最上侧一行左侧,当前程序的菜单 dock:应用程序快捷图标,启动的程序下面有个 ...
- mysql 下的命令
1.查看mysql日志vim /var/log/mysqld.log
- python 学习笔记(十四)有依赖关系的接口开发
接口开发中存在很多有依赖关系的接口,例如:BBS中发帖的时候就需要进行校验用户是否登录,那么此时发帖的接口就与用户登录接口有依赖关系.在发帖时就需要先获取用户的session,与当前登录用户进行校验对 ...