Kossel的一种滑块位置计算方法
做了一个小激光雕刻机之后,研究了一下这款3D打印机的结构和工作原理,一下就对这个运动过程很感兴趣,这三个杆是怎么联动使得喷头保持在一个平面上运动呢?打算先做一个架构,然后把激光器放在上面不是可以方便雕刻不同厚度的东西了么,好吧,我承认也想做一下这个3D打印机。不过,入坑的时候,一点一点的下而已。
写这个算法,需要首先简化一下模型,做一些转化和定义:
1、并联臂两根,简化成1根,假定为1根(对算法结果没影响,我猜两根就是为了更好的在重力不平衡的情况下保持平面的稳定性。有不对的地方还请大手子指教)。
2、假定的这根连杆,其与效应器的接点就在并联的两根鱼眼的中心连线的中点处,并且这个点称为效应器三角形的一个顶点。
3、同样的,假定的连杆另一端在滑块连接处两个鱼眼中心连线的中点处,设为A点。
4、从A点向下做垂直于效应器平面的直线,这条直线上的某一点就是我们要求的某一轴的目标位置。
观察一下下面的图(借用一下网上的图,绘图技术太烂,如果作者不允许请马上联系我更换):
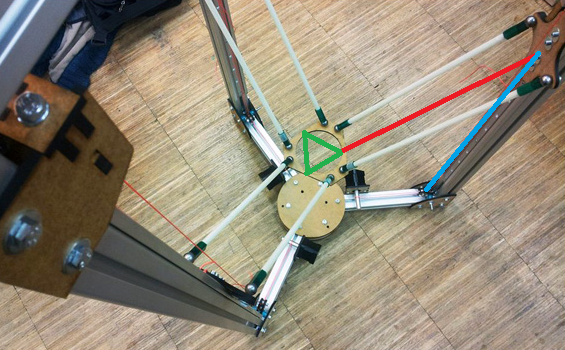
图中绿色三角就是效应器三角形,蓝色直线就是虚拟的平行于z轴的直线,红色直线就是虚拟的连杆。那么,现在我们进行分析,在当前位置下红蓝直线的交点怎么求:
运动过程中,红色直线是定长的,其下端点可以根据挤出头求出——已知;其上端一定落在蓝色直线上——所求。现在,这个模型就很好转换了:已知红绿交点处坐标为一个半径为红色直线长度的球,求该球与蓝色直线的交点?这个交点可能没有——远离球,可能一个——相切,可能两个——穿过,可以猜测一下是一个一元二次方程。
OK,现在我们就来解一下这个问题(使用向量好吧,先不要来XYZ)。设:三条虚拟直线垂直于底床平面,三个交点组成的等边三角形中心为世界坐标系原点,X=0,Y=0,Z=0:
1、直线方程:
P(t)=O+tD
若我们规范D(直线方向)向量,则t就是所求坐标。
2、球方程:
(P-C)(P-C)=R^2
R为假象连杆长度,可测,C为球心——上述已经可求,P为球上任意一点。
3、联立两个方程:
(D*D)t^2+2*D(O-c)t+(O-C)(O-C)-R^2=0
解这个关于t的一元二次方程就可以得到两个解(除非你真的让某一个连杆水平起来了),我们取其中较高位置的一个(这个我没有去验证到底是近的一个还是高的一个,但是可以考虑一种情况:当效应器较低时,另一个交点低于效应器三角形的平面)。所以,我们的计算用到很多量,也体现出增加精度的方向:
1、仔细测量连杆两端鱼眼的中心的距离并且保证六根尽可能完全一样长。
2、安装挤出头时,让它的尖端的竖直投影与我们效应器的虚拟三角形(等边三角形)中心重合——效应器本身的对称程度、安装位置等因素。
3、工作台与效应器平面平行,至少在用微动开关或者压敏管矫正的时候要细心一些,安装光电计数器时也要仔细一点。我想我会自己写一个程序来校准它。
好了,啰嗦了不少,现在来写这个直线与球交点的解法:
Function LineCrossSphere(Origin As Vector3D, Direction As Vector3D, Center As Vector3D, Radius As Double) As Vector3D
Direction.Normalize()
Dim VecCO = Origin - Center
Dim a As Double = Vector3D.DotProduct(Direction, Direction)
Dim b As Double = * Vector3D.DotProduct(Direction, VecCO)
Dim c As Double = Vector3D.DotProduct(VecCO, VecCO) - Radius ^
Dim delta As Double = b ^ - * a * c
If delta >= Then '不相交
Dim sqrtdelta As Double = Math.Sqrt(delta)
Dim t1 As Double = (-b + sqrtdelta) / (2.0 * a)
Dim t2 As Double = (-b - sqrtdelta) / (2.0 * a)
Dim t As Double = Math.Max(t1, t2)
Dim p = Origin + Vector3D.Multiply(t, Direction) '取更高的一个解
Return p
Else
Return Vector3DEmpty
End If
End Function
O是蓝色直线与三角形平面的交点,D是(0,0,1),C是绿色三角形和红线的交点,R是连杆长度。其实,这个函数还可以进行简化,但是我没有去做,它运行于上位机并且是预计算的,而且优化也没有太大提升。现在,我们只需要根据我们所需的挤出头位置A+挤出头到效应器平面的距离为绿色三角形中心,然后根据绿色三角形的大小计算出3个Origin参数。当然,这里有一个小技巧,我们设效应器三角形某一个顶点A在Y轴上则三角形中心到顶点的向量OA经过旋转正负120度就得到了另外两个顶点。
函数整合和使用哪种3D组件进行计算就是你的问题了。我使用了System.Windows.Media.Media3D名空间中的函数进行计算,因为它的V3D中X,Y,Z都是双精度浮点并且前段时间稍微用过一下。当你取得下列数据时,就可以进行计算了:
效应器平面到笔尖的竖直距离(激光头焦点、挤出头尖端)
效应器XY平面上的Y点坐标(中心为笔尖到效应器平面的垂直投影)
并联臂长度
世界坐标系下XY平面上Y滑块与并联臂相连点投影的坐标
最后,简单提一下自动矫正的问题,选择传感器种类时最关键是传感器的精度,当然微动开关并不是不行,但是你要知道它的行程。在自动矫正过程中,可以得到一系列数据,我们可以网格化探测,而后当打印时喷头运行到某一个格子里的时候,把四个角的值和当前值位置进行比较进行一些处理得到合理的矫正值就可以了。原理就是这样,所以底床最好还是平一些,麻子太多再自动校准没白费,除非每个点都探测一下,那可能要形成海量数据,就没法愉快的玩耍了。
Kossel的一种滑块位置计算方法的更多相关文章
- 爬虫笔记之w3cschool注册页面滑块验证码破解(巨简单滑块位置识别,非鼠标模拟轨迹)
一.背景介绍 最开始接触验证码破解的时候就是破解的w3cschool的使用手机号找回密码页面的验证码,详见:验证码识别之w3cschool字符图片验证码(easy级别),这次破解一下他们注册页面的滑块 ...
- 【计算机视觉】极限优化:Haar特征的另一种的快速计算方法—boxfilter
这种以Boxfilter替代integral image 的方法很难使用到haar.LBP等特征检测中,因为像下面说的,它不支持多尺度,也就是说所提取的特征必须是同一个大小,最起码同一个宽高比的,这一 ...
- Mahout的taste里的几种相似度计算方法
欧几里德相似度(Euclidean Distance) 最初用于计算欧几里德空间中两个点的距离,以两个用户x和y为例子,看成是n维空间的两个向量x和y, xi表示用户x对itemi的喜好值,yi表示 ...
- java数据的5种存储位置(转)
任何语言所编写的程序,其中的各类型的数据都需要一个存储位置,java中书的存储位置分为以下5种: 1.寄存器 最快的存储区,位于处理器内部,但是数量及其有限.所以寄存器根据需求自动分配,无序人为控制. ...
- 【Python学习】函数参数传递方法四种(位置,关键字,默认值,包裹位置,包裹关键字传递)
1. 位置传递: #--coding:utf-8-- def send(name,address): return 'package is sent to %s, located in %s' %(n ...
- Java中配置文件的三种配置位置及读取方式
XML 和properties properties: 1.存放于src根目录下 //获取到同包下的资源文件,将其转换成流对象 //InputStream is= PropertiesDemo.cla ...
- 使用Python + Selenium破解滑块验证码
在前面一篇博客<使用 Python + Selenium 打造浏览器爬虫>中,我介绍了 Selenium 的基本用法和爬虫开发过程中经常使用的一些小技巧,利用这些写出一个浏览器爬虫已经完全 ...
- OpenCV图像载入、显示和输出到文件以及滑块的使用
图像载入 imread()函数 Mat imread(const string& filename, int flags = 1); 第一个参数为文件名 第二个参数为载入标识 flags &g ...
- 解密jQuery内核 Sizzle引擎筛选器 - 位置伪类(一)
本章开始分析过滤器,根据API的顺序来 主要涉及的知识点 jQuery的组成 pushStack方法的作用 sizzle伪类选择器 首页我们知道jQuery对象是一个数组对象 内部结构 jQuery的 ...
随机推荐
- MyCat的分片规则
1. 枚举法: 通过在配置文件中配置可能的枚举id,自己配置分片,使用规则: <tableRule name="sharding-by-intfile"> <ru ...
- cf 290F. Treeland Tour 最长上升子序列 + 树的回溯 难度:1
F. Treeland Tour time limit per test 5 seconds memory limit per test 256 megabytes input standard in ...
- zoj3656
题解: 按照位展开,然后一位一位判断 注意判断给出数据是否有问题 代码: #include<cstdio> #include<cmath> #include<algori ...
- hdu 6040 Hints of sd0061(stl: nth_element(arr,arr+k,arr+n))
Hints of sd0061 Time Limit: 5000/2500 MS (Java/Others) Memory Limit: 131072/131072 K (Java/Others ...
- Linux下的ASLR(PIE)内存保护机制
1.1 Linux下的ASLR内存保护机制 1.1.1 Linux下的ASLR工作原理 工作原理与window下的aslr类似 1.1.2 Linux下利用内存地址泄露绕过ASLR ⑴. ...
- 策略模式-Java实现
策略模式—Java实现 1. 现实需求 本人现在负责开发和维护考核督办系统,其中一个模块叫编写工作计划.是工作计划就要有时间,我们的各种提醒都做了,但是还是有人把x月的工作计划内容写到y月,真心无语了 ...
- React状态管理之redux
其实和vue对应的vuex都是差不多的东西,这里稍微提一下(安装Redux略过): import { createStore, combineReducers, applyMiddleware } f ...
- Java并发编程之CountDownLatch,CyclicBarrier实现一组线程相互等待、唤醒
java多线程应用场景不少,有时自己编写代码又不太容易实现,好在concurrent包提供了不少实现类,还有google的guava包更是提供了一些最佳实践,这让我们在面对一些多线程的场景时,有了不少 ...
- ECMAScript 6 基础入门
0. ECMAScript 与 JavaScript ECMAScript (ECMA 262)是 JavaScript 语言标准的名字,ECMAScript 是标准,JavaScript 是各厂商的 ...
- 初用vue遇到的一些问题
1.过滤器: filters: { search(list) { es5 var _self = this; //return list.filter(menu => menu.childs.n ...