Canny边缘检测算法原理及其VC实现详解(一)
转自:http://blog.csdn.net/likezhaobin/article/details/6892176
图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。
本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。
1、边缘检测原理及步骤
在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。
在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。这就使得在边缘检测中首先要进行的工作是滤波。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。
2、Canny边缘检测算法原理
JohnCanny于1986年提出Canny算子,它与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法。本节对根据上述的边缘检测过程对Canny检测算法的原理进行介绍。
2.1 对原始图像进行灰度化
Canny算法通常处理的图像为灰度图,因此如果摄像机获取的是彩色图像,那首先就得进行灰度化。对一幅彩色图进行灰度化,就是根据图像各个通道的采样值进行加权平均。以RGB格式的彩图为例,通常灰度化采用的方法主要有:
方法1:Gray=(R+G+B)/3;
方法2:Gray=0.299R+0.587G+0.114B;(这种参数考虑到了人眼的生理特点)
注意1:至于其他格式的彩色图像,可以根据相应的转换关系转为RGB然后再进行灰度化;
注意2:在编程时要注意图像格式中RGB的顺序通常为BGR。
2.2 对图像进行高斯滤波
图像高斯滤波的实现可以用两个一维高斯核分别两次加权实现,也可以通过一个二维高斯核一次卷积实现。
1)高斯核实现
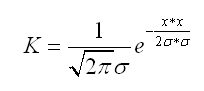
上式为离散化的一维高斯函数,确定参数就可以得到一维核向量。
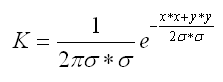
上式为离散化的二维高斯函数,确定参数就可以得到二维核向量。
注意1:关于参数Sigma的取值详见上篇博文。
注意2:在求的高斯核后,要对整个核进行归一化处理。
2)图像高斯滤波
对图像进行高斯滤波,听起来很玄乎,其实就是根据待滤波的像素点及其邻域点的灰度值按照一定的参数规则进行加权平均。这样可以有效滤去理想图像中叠加的高频噪声。
通常滤波和边缘检测是矛盾的概念,抑制了噪声会使得图像边缘模糊,这回增加边缘定位的不确定性;而如果要提高边缘检测的灵敏度,同时对噪声也提高了灵敏度。实际工程经验表明,高斯函数确定的核可以在抗噪声干扰和边缘检测精确定位之间提供较好的折衷方案。这就是所谓的高斯图像滤波,具体实现代码见下文。
2.3 用一阶偏导的有限差分来计算梯度的幅值和方向
关于图像灰度值得梯度可使用一阶有限差分来进行近似,这样就可以得图像在x和y方向上偏导数的两个矩阵。常用的梯度算子有如下几种:
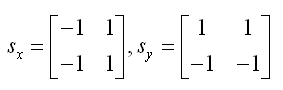
1)Roberts算子
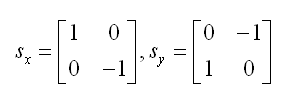
上式为其x和y方向偏导数计算模板,可用数学公式表达其每个点的梯度幅值为:

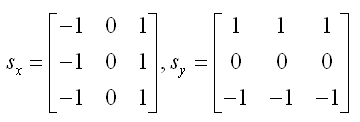
2)Sobel算子
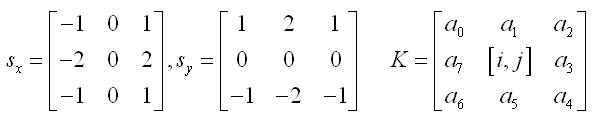
上式三个矩阵分别为该算子的x向卷积模板、y向卷积模板以及待处理点的邻域点标记矩阵,据此可用数学公式表达其每个点的梯度幅值为:
3)Prewitt算子
和Sobel算子原理一样,在此仅给出其卷积模板。
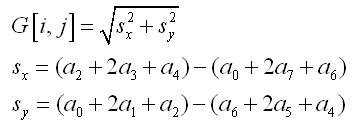
4)Canny算法所采用的方法
在本文实现的Canny算法中所采用的卷积算子比较简单,表达如下:
其x向、y向的一阶偏导数矩阵,梯度幅值以及梯度方向的数学表达式为:
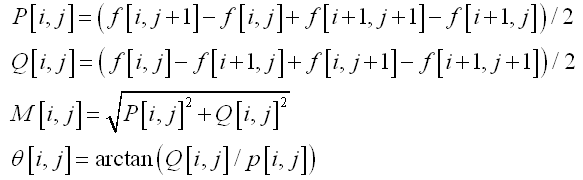
求出这几个矩阵后,就可以进行下一步的检测过程。
2.4 对梯度幅值进行非极大值抑制
图像梯度幅值矩阵中的元素值越大,说明图像中该点的梯度值越大,但这不不能说明该点就是边缘(这仅仅是属于图像增强的过程)。在Canny算法中,非极大值抑制是进行边缘检测的重要步骤,通俗意义上是指寻找像素点局部最大值,将非极大值点所对应的灰度值置为0,这样可以剔除掉一大部分非边缘的点(这是本人的理解)。
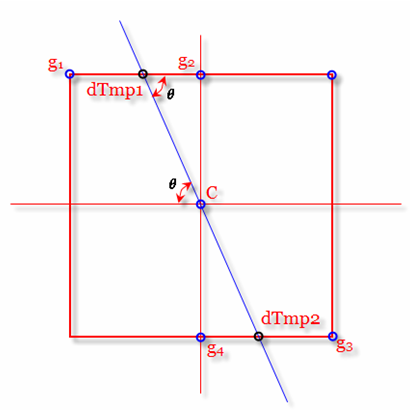
图1 非极大值抑制原理
根据图1 可知,要进行非极大值抑制,就首先要确定像素点C的灰度值在其8值邻域内是否为最大。图1中蓝色的线条方向为C点的梯度方向,这样就可以确定其局部的最大值肯定分布在这条线上,也即出了C点外,梯度方向的交点dTmp1和dTmp2这两个点的值也可能会是局部最大值。因此,判断C点灰度与这两个点灰度大小即可判断C点是否为其邻域内的局部最大灰度点。如果经过判断,C点灰度值小于这两个点中的任一个,那就说明C点不是局部极大值,那么则可以排除C点为边缘。这就是非极大值抑制的工作原理。
作者认为,在理解的过程中需要注意以下两点:
1)中非最大抑制是回答这样一个问题:“当前的梯度值在梯度方向上是一个局部最大值吗?” 所以,要把当前位置的梯度值与梯度方向上两侧的梯度值进行比较;
2)梯度方向垂直于边缘方向。
但实际上,我们只能得到C点邻域的8个点的值,而dTmp1和dTmp2并不在其中,要得到这两个值就需要对该两个点两端的已知灰度进行线性插值,也即根据图1中的g1和g2对dTmp1进行插值,根据g3和g4对dTmp2进行插值,这要用到其梯度方向,这是上文Canny算法中要求解梯度方向矩阵Thita的原因。
完成非极大值抑制后,会得到一个二值图像,非边缘的点灰度值均为0,可能为边缘的局部灰度极大值点可设置其灰度为128。根据下文的具体测试图像可以看出,这样一个检测结果还是包含了很多由噪声及其他原因造成的假边缘。因此还需要进一步的处理。
2.5 用双阈值算法检测和连接边缘
Canny算法中减少假边缘数量的方法是采用双阈值法。选择两个阈值(关于阈值的选取方法在扩展中进行讨论),根据高阈值得到一个边缘图像,这样一个图像含有很少的假边缘,但是由于阈值较高,产生的图像边缘可能不闭合,未解决这样一个问题采用了另外一个低阈值。
在高阈值图像中把边缘链接成轮廓,当到达轮廓的端点时,该算法会在断点的8邻域点中寻找满足低阈值的点,再根据此点收集新的边缘,直到整个图像边缘闭合。
以上即为整个Canny边缘检测算法的原理分析,接下来我们进行VC下的算法实现和效果分析。
Canny边缘检测算法原理及其VC实现详解(一)的更多相关文章
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- Canny边缘检测算法原理及其VC实现详解(二)
转自:http://blog.csdn.net/likezhaobin/article/details/6892629 3. Canny算法的实现流程 由于本文主要目的在于学习和实现算法,而对于图像 ...
- Canny边缘检测算法原理及C语言实现详解
Canny算子是John Canny在1986年提出的,那年老大爷才28岁,该文章发表在PAMI顶级期刊上的(1986. A computational approach to edge detect ...
- 十五 Canny边缘检测算法
一.Canny算法介绍 Canny 的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是: 好的检测- 算法能够尽可能多地标识出图像中的实际边缘. 好的定位- 标识出的边缘要尽可能与实际图像中的实 ...
- 【算法随记】Canny边缘检测算法实现和优化分析。
以前的博文大部分都写的非常详细,有很多分析过程,不过写起来确实很累人,一般一篇好的文章要整理个三四天,但是,时间越来越紧张,后续的一些算法可能就以随记的方式,把实现过程的一些比较容易出错和有价值的细节 ...
- 一些关于Canny边缘检测算法的改进
传统的Canny边缘检测算法是一种有效而又相对简单的算法,可以得到很好的结果(可以参考上一篇Canny边缘检测算法的实现).但是Canny算法本身也有一些缺陷,可以有改进的地方. 1. Canny边缘 ...
- Canny边缘检测算法的一些改进
传统的Canny边缘检测算法是一种有效而又相对简单的算法,可以得到很好的结果(可以参考上一篇Canny边缘检测算法的实现).但是Canny算法本身也有一些缺陷,可以有改进的地方. 1. Canny边缘 ...
- 【数字图像分析】基于Python实现 Canny Edge Detection(Canny 边缘检测算法)
Canny 边缘检测算法 Steps: 高斯滤波平滑 计算梯度大小和方向 非极大值抑制 双阈值检测和连接 代码结构: Canny Edge Detection | Gaussian_Smoothing ...
- Canny边缘检测算法(基于OpenCV的Java实现)
目录 Canny边缘检测算法(基于OpenCV的Java实现) 绪论 Canny边缘检测算法的发展历史 Canny边缘检测算法的处理流程 用高斯滤波器平滑图像 彩色RGB图像转换为灰度图像 一维,二维 ...
随机推荐
- Siki_Unity_3-8_Lua编程(未完)
Unity 3-8 Lua编程 任务1&2&3:前言 课程内容: Lua从入门到掌握 为之后的xLua和其他热更新方案打下基础 任务4:Lua简介 Lua是轻量小巧的脚本语言--无需编 ...
- Python最简编码规范
前言 本文是阅读<Python Coding Rule>之后总结的最为精华及简单的编码规范,根据每个人不同喜好有些地方会有不同的选择,我只是做了对自己来说最简单易行的选择,仅供大家参考. ...
- scrum立会报告+燃尽图(第二周第五次)
此作业要求参见:https://edu.cnblogs.com/campus/nenu/2018fall/homework/2250 一.小组介绍 组名:杨老师粉丝群 组长:乔静玉 组员:吴奕瑶.公冶 ...
- 学霸系统UI部分功能规格说明书
发布人员:软件工程实践小队 发布内容:学霸系统UI部分功能规格说明书 版本:学霸V1.1版本 ◆Part 1:引言 1.1目的 本功能规格说明书的目的在于明确 ...
- HTTP vs HTTPS
参考博文:HTTP与HTTPS的区别 HTTP与HTTPS的区别 一.HTTP和HTTPS的基本概念和区别 HTTP: 是互联网上应用最为广泛的一种网络协议,是一个客户端和服务器端请求和应答的标准(T ...
- lintcode-129-重哈希
129-重哈希 哈希表容量的大小在一开始是不确定的.如果哈希表存储的元素太多(如超过容量的十分之一),我们应该将哈希表容量扩大一倍,并将所有的哈希值重新安排.假设你有如下一哈希表: size=3, c ...
- 设计模式--Restful笔记(一)
一.REST基础概念 首先REST是 Representational State Transfer 的缩写,如果一个架构符合REST原则,它就是RESTful架构. 在REST中的一切都被认为是一种 ...
- QHash和QMultiHash使用
版权声明:若无来源注明,Techie亮博客文章均为原创. 转载请以链接形式标明本文标题和地址: 本文标题:QHash和QMultiHash使用 本文地址:http://techieliang. ...
- c语言----程序记录
1.结构体写入文件,读取 #include <stdio.h> #include <string.h> #include <stdlib.h> #define ma ...
- Android Studio- 把项目提交到SVN中操作方法
第一步 下载SVN,下载完成之后,需要吧command line client tools点击修改安装 然后Crash Reporter点击选择取消安装 如果不进行该操作,则可能在C:\Program ...