详细理解平衡二叉树AVL与Python实现
前言
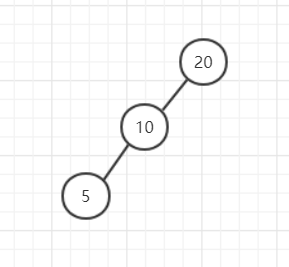
上一篇文章讨论的二叉搜索树,其时间复杂度最好的情况下是O(log(n)),但是最坏的情况是O(n),什么时候是O(n)呢?
像这样:
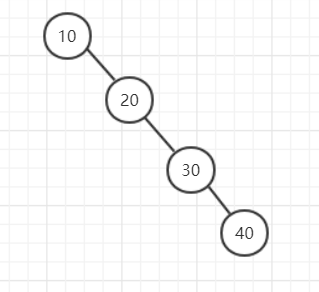
如果先插入10,再插入20,再插入30,再插入40就会成上边这个样子
这个就像是双向链表,我们期望它是下面这个样子:

所以我们希望有一种策略能够将第一个图变成第二个图,或者说使树的结构不会产生像第一种图的形式
实现这种策略的一种方式是AVL树
AVL树
AVL树的名称是以它的发明家的名字命名的:Adel’son-Vel’skii和Landis
满足高度平衡属性的二叉树就是AVL树
高度平衡属性是:对于树中的每一个位置p,p的孩子的高度最多相差1
很显然前言中的第一个图并不满足高度平衡属性,第二个是满足的。
同时高度平衡属性也意味着一颗AVL树的子树同样是AVL树
并且可以通过证明(这里就不再证了)得到AVL树的高度是O(log n)
所以得出结论,AVL树可以使时间复杂度保持O(log n)
接下来的问题就是怎样保持二叉树的高度平衡属性
保持二叉树的高度平衡属性
要保持高度平衡属性的原因是破坏了高度平衡属性
破坏的方式有两种:添加节点与删除节点
添加节点如图:
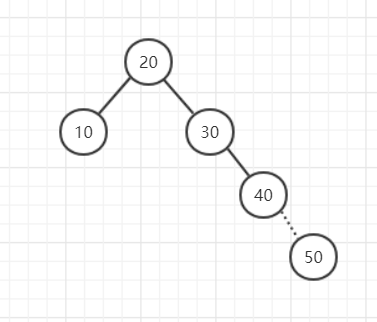
添加50的时候,就会破坏高度平衡属性
删除节点如图:
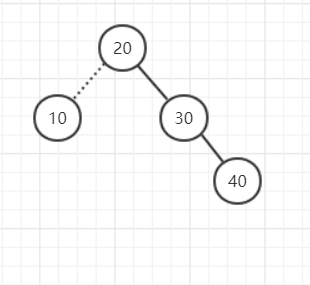
删除10的时候也会破坏高度平衡属性
最后,不论是添加节点还是删除节点,都会使树变成非高度平衡的状态,这种非高度平衡的状态有4种:
1.LL

LL是left-left,可以理解为:首先它不平衡,其次根节点的左子树比右子树高,并且根节点的左子树的左子树比根节点的左子树的右子树高。(从上到下都是左边高)
2.LR
LR是left-right,可以理解为:首先它不平衡,其次根节点的左子树比右子树高,并且根节点的左子树的右子树比根节点的左子树的左子树高。(从上到下先左高后右高)
3.RR

RR是right-right,可以理解为:首先它不平衡,其次根节点的右子树比左子树高,并且根节点的右子树的右子树比根节点的右子树的左子树高。(从上到下都是右边高)
4.RL

RL是right-left,可以理解为:首先它不平衡,其次根节点的右子树比左子树高,并且根节点的右子树的左子树比根节点的右子树的右子树高。(从上到下先右高后左高)
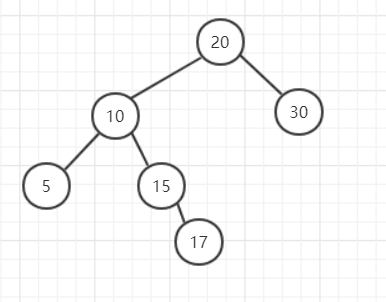
最后,判断是哪种形式的非平衡状态,一定要从不平衡的节点位置看,并不是看4层,比如:
这里只有3层节点,不平衡的节点是20,20的左子树比右子树高,10的左子树比右子树高,所以是LL。(这里的高定义为节点5的高度为1,空节点的高度为0)
接下来是保持高度平衡的调整策略:
同样对于4种不同的形式有4种解决方案:
1.LL

这个变换就像是以10为中心,向右旋转,使10变成根节点,10的左子树不变,右子树变成了20,多余出的15正好挂在由于变换失去了左子树的20的左边。变换后结点从左到右的顺序依然没有变,所以15是正好挂在20的左边的。
2.RR
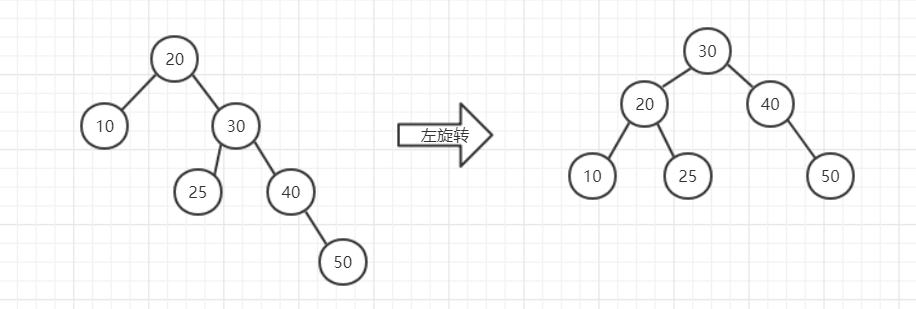
RR与LL形式差不多,只不顾是反着来的。相当于进行一次左旋转。
RR与LL都只进行一次旋转即可,而LR与RL需要进行两次旋转
3.LR
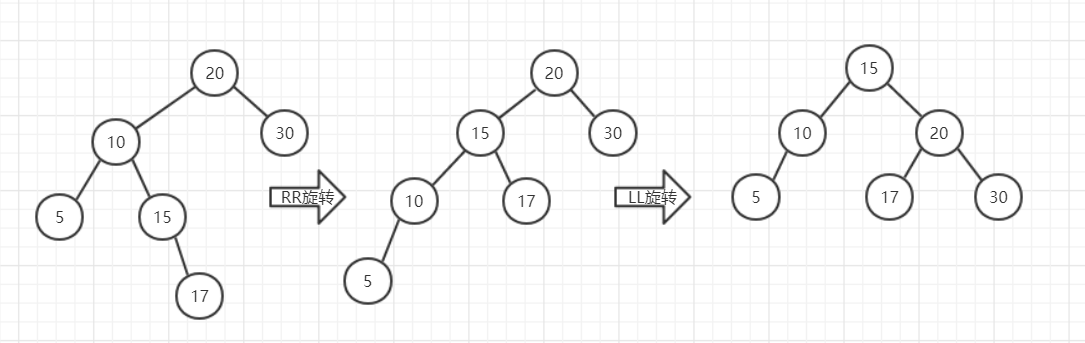
第一次相当于对5、10、15、17这棵子树进行了一次RR旋转,旋转方式与之前的RR方式相同,就像是以15为中心向左旋转,旋转的结果使得整棵树变成了LL的不平衡形态,然后再按照LL的旋转方式对整棵树处理。
4.RL
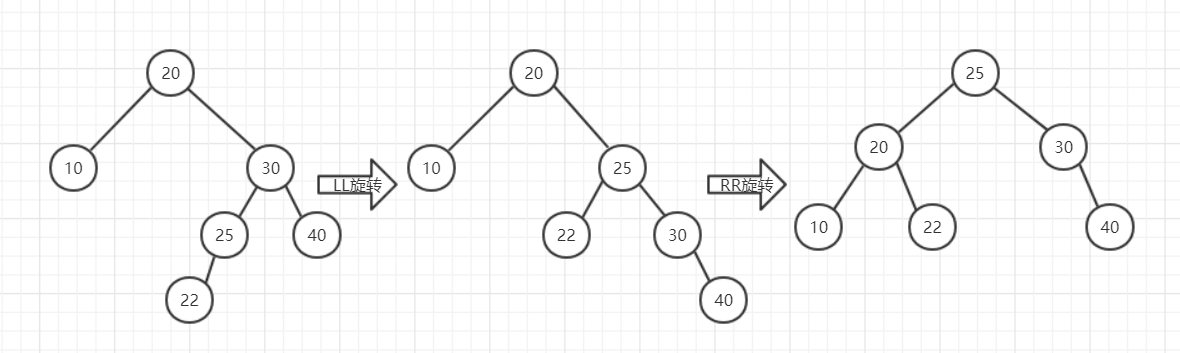
RL同样是LR的相反模式,先将22、25、30、40这棵子树进行LL旋转,再将整棵树进行RR旋转
理解了avl保持平衡从方式后,就可以用代码来实现了
Python实现
我们使用AVL对上一篇文章中的有序映射进行优化
因为AVL依赖于节点的高度,所以首先要重写一下Node类:
class AvlTree(OrderedMap):
class Node(OrderedMap.Node):
def __init__(self, element, parent=None, left=None, right=None):
super().__init__(element,parent,left,right)
self.height = 0
def left_height(self):
return self.left.height if self.left is not None else 0
def right_height(self):
return self.right.height if self.right is not None else 0
接下来定义4中调整的非公开方法
def _left_left(self,p):
this = p.node # 有变化的就4个节点
left = this.left
parent = this.parent
left_right = this.left.right
if parent is not None:
if this is parent.left:
parent.left = left
else:
parent.right = left
else:
self._root = left
this.parent = left
left.parent = parent
this.left = left_right
left.right = this
if left_right is not None:
left_right.parent = this
def _right_right(self,p):
this = p.node # 有变化的就4个节点
right = this.right
parent = this.parent
right_left = this.right.left
if parent is not None:
if this is parent.left:
parent.left = right
else:
parent.right = right
else:
self._root = right
this.parent = right
right.parent = parent
this.right = right_left
right.left = this
if right_left is not None:
right_left.parent = this
def _left_right(self,p):
self._right_right(self.left(p))
self._left_left(p)
def _right_left(self,p):
self._left_left(self.right(p))
self._right_right(p)
然后是用于平衡二叉树的方法,也就是根据情况调用上边那4种策略
def _isbalanced(self,p):
"""判断节点是否平衡"""
return abs(p.node.left_height() - p.node.right_height()) <= 1
def _recompute_height(self,p):
"""重新计算高度"""
p.node.height = 1 + max(p.node.left_height(),p.node.right_height())
def _rebalanced(self,p):
while p is not None:
if self._isbalanced(p):
self._recompute_height(p)
p = self.parent(p)
else:
if p.node.left_height()>p.node.right_height() and p.node.left.left_height()>p.node.left.right_height():
# LL的情况,只有自己和左孩子的高度可能变化
self._left_left(p)
elif p.node.right_height()>p.node.left_height() and p.node.right.right_height()>p.node.right.left_height():
# RR的情况,只有自己和右孩子的高度可能变化
self._right_right(p)
elif p.node.left_height()>p.node.right_height() and p.node.left.left_height()<p.node.left.right_height():
# LR的情况,只有自己和左孩子和左孩子的右孩子的高度可能变化
left = self.left(p)
self._left_right(p)
self._recompute_height(left)
else:
# RL的情况,只有自己和右孩子和右孩子的左孩子的高度可能变化
right = self.right(p)
self._right_left(p)
self._recompute_height(right)
while p is not None:
# 调整所有p的祖先的高度
self._recompute_height(p)
p = self.parent(p)
然后把方法封装成删除时和插入时的两个方法,虽然执行的内容是相同的
def _rebalanced_insert(self,p):
"""插入时的平衡调整"""
self._rebalanced(p)
def _rebalanced_delete(self, p):
"""删除时的平衡调整"""
self._rebalanced(p)
最后重写一下setitem方法与删除时调用的方法
def __setitem__(self, k, v):
"""优化setitem"""
if self.is_empty():
leaf = self.add_root(self._Item(k, v))
else:
p = self._subtree_search(self.root(), k)
if p.key() == k:
p.element().value = v
return
else:
item = self._Item(k, v)
if p.key() < k:
leaf = self.add_right(p, item)
else:
leaf = self.add_left(p, item)
self._rebalanced_insert(leaf)
def mapdelete(self, p):
if self.left(p) and self.right(p): # 两个孩子都有的时候
replacement = self._subtree_last_position(
self.left(p)) # 用左子树最右位置代替
self.replace(p, replacement.element())
p = replacement
parent = self.parent(p)
self.delete(p)
self._rebalanced_delete(parent)
在实现4种平衡策略时,一定要记着将整棵树的根节点更新,不然遍历的时候,根节点指的就不是真正的根节点了。
详细理解平衡二叉树AVL与Python实现的更多相关文章
- 数据结构与算法--从平衡二叉树(AVL)到红黑树
数据结构与算法--从平衡二叉树(AVL)到红黑树 上节学习了二叉查找树.算法的性能取决于树的形状,而树的形状取决于插入键的顺序.在最好的情况下,n个结点的树是完全平衡的,如下图"最好情况&q ...
- 平衡二叉树AVL - 插入节点后旋转方法分析
平衡二叉树 AVL( 发明者为Adel'son-Vel'skii 和 Landis)是一种二叉排序树,其中每一个节点的左子树和右子树的高度差至多等于1. 首先我们知道,当插入一个节点,从此插入点到树根 ...
- iOS - 详细理解KVC与KVO
详细理解KVC与KVO 在面试的时候,KVC与KVO有些时候还是会问到的,并且他们都是Objective C的关键概念,在这里我们先做一个简单地介绍: (一)KVC: KVC即指:NSKeyValue ...
- 二叉查找树(BST)、平衡二叉树(AVL树)(只有插入说明)
二叉查找树(BST).平衡二叉树(AVL树)(只有插入说明) 二叉查找树(BST) 特殊的二叉树,又称为排序二叉树.二叉搜索树.二叉排序树. 二叉查找树实际上是数据域有序的二叉树,即对树上的每个结点, ...
- AVL树Python实现
# coding=utf-8 # AVL树Python实现 def get_height(node): return node.height if node else -1 def tree_mini ...
- 史上最详细的C语言和Python的插入排序算法
史上最详细的C语言和Python的插入排序算法插入排序原理:所谓插入排序,就像我们在打牌(斗地主)时,整理我们自己手中自己的牌一样,就像是2,1,3,9,J,K,5,4,这四张牌.我们要把它其中的几张 ...
- [转帖]linux中systemctl详细理解及常用命令
linux中systemctl详细理解及常用命令 2019年06月28日 16:16:52 思维的深度 阅读数 30 https://blog.csdn.net/skh2015java/article ...
- 二叉查找树、平衡二叉树(AVL)、B+树、联合索引
1. [定义] 二叉排序树(二拆查找树)中,左子树都比节点小,右子树都比节点大,递归定义. [性能] 二叉排序树的性能取决于二叉树的层数 最好的情况是 O(logn),存在于完全二叉排序树情况下,其访 ...
- linux中systemctl详细理解及常用命令
linux中systemctl详细理解及常用命令 https://blog.csdn.net/skh2015java/article/details/94012643 一.systemctl理解 Li ...
随机推荐
- Python:渗透测试开源项目【源码值得精读】
sql注入工具:sqlmap DNS安全监测:DNSRecon 暴力破解测试工具:patator XSS漏洞利用工具:XSSer Web服务器压力测试工具:HULK SSL安全扫描器:SSLyze 网 ...
- Hadoop社区版搭建
1.环境准备 1.1 硬件配置 设备名 参数 数量 6台 系统 centos6.5 内存 64G 硬盘 32T/台 CPU 16核/台 1.2 软件版本 Hadoop-2.x 下载地址 JDK1.7 ...
- 001. Asp.Net Routing与MVC 之(基础知识):URL
URL(Uniform Resoure Locator:统一资源定位器)是WWW页的绝对地址.URL地址格式排列为:scheme://host:port/path. 例如 http://www.zn. ...
- RocketMQ 集群监控以及Hello World
RocketMQ 目前有两个版本 alibaba版本和apache版本 一.alibaba版本 tomcat部署: apache-tomcat-7.0.90.tar.gz jdk7 虚拟机redha ...
- kafka server管理
kafka启动以来zookeeper kafka启动之前,首先要启动zookeeper 1.1.kafka启动单个节点 -daemon 表示程序以守护进程的方式后台云心 --override pro ...
- [深度学习]理解RNN, GRU, LSTM 网络
Recurrent Neural Networks(RNN) 人类并不是每时每刻都从一片空白的大脑开始他们的思考.在你阅读这篇文章时候,你都是基于自己已经拥有的对先前所见词的理解来推断当前词的真实含义 ...
- 十大经典排序算法的 JavaScript 实现
计算机领域的都多少掌握一点算法知识,其中排序算法是<数据结构与算法>中最基本的算法之一.排序算法可以分为内部排序和外部排序,内部排序是数据记录在内存中进行排序,而外部排序是因排序的数据很大 ...
- Java 8 新特性-菜鸟教程 (5) -Java 8 Stream
Java 8 Stream Java 8 API添加了一个新的抽象称为流Stream,可以让你以一种声明的方式处理数据. Stream 使用一种类似用 SQL 语句从数据库查询数据的直观方式来提供一种 ...
- kong+konga
kong+kongau 注意kong1.0与之前版本API发生了很大的改动,所以是不兼容的,kongav0.14.0是匹配kong1.0+的,不兼容1.0之前的.可以根据自己的需求进行选择. kong ...
- Struts2学习(六)———— 文件上传和下载
一.单文件上传 在没学struts2之前,我们要写文件上传,非常麻烦,需要手动一步步去获取表单中的各种属性,然后在进行相应的处理,而在struts2中就不需要了,因为有一个fileUpload拦截器帮 ...