裸机LCD驱动配置
本节来学习裸机下的LCD 驱动,本节学完后,再来学习Linux下如何使用LCD驱动
Linux中的LCD驱动,链接如下:
(Linux-LCD层次分析链接:http://www.cnblogs.com/lifexy/p/7603327.html)
(Linux-LCD驱动分析链接:http://www.cnblogs.com/lifexy/p/7604011.html)
横屏4.3寸LCD为480*272(行:480个像素点 列:272个行)
1.LCD原理图 :

Pin1- Pin6:Von/ Voff 电源正/负(由GPG4控制,高电平有效)
Pin2:VM/VDEN 数据使能信号 (0:表示正在跳行,1:表示可以传输像素数据)
Pin8:VLINE/HSYNC 水平同步信号(每扫完一行,即发一次水平同步信号)
Pin28:VFRAME/VSNC 垂直同步信号(每扫完一屏,即发一次垂直同步信号)
Pin30:VLCK 时钟信号
Pin42,Pin45 LED+,LED- 背光显示开关 (由0:off 1:no)
VD23~VD19:R信号
VD15~VD10:G信号
VD7~VD3 :B信号
数据是采用16Bpp像素,RGB565格式(因为LCD控制器不支持18Bpp格式)
例如:粉色RGB值分别为209,92,174(11010001,01011100,10101110)
数据从高位往下取,R和B取5位,G取6位,那么值为0XD2F5。
565RGB引脚连接图如下:

1.2配置引脚
GPCUP = 0xffffffff; // 禁止内部上拉
GPCCON = 0xaaaaaaaa; // GPIO管脚用于VD[7:0],LCDVF[2:0],VM,VFRAME,VLINE,VCLK,LEND
GPDUP = 0xffffffff; // 禁止内部上拉
GPDCON = 0xaaaaaaaa; // GPIO管脚用于VD[23:8]
GPBCON &= ~(GPB0_MSK); // Power enable pin
GPBCON |= GPB0_out;
GPBDAT &= ~(<<); // Power off
2.设置LCDCON1~5控制寄存器
2.1BSWP和HWSWP介绍
更改存储格式,对于16bppRGB565(高数据在后)来说,BSWP=0, HWSWP=1

2.2查看2440中LCD控制器初始状态时序图:
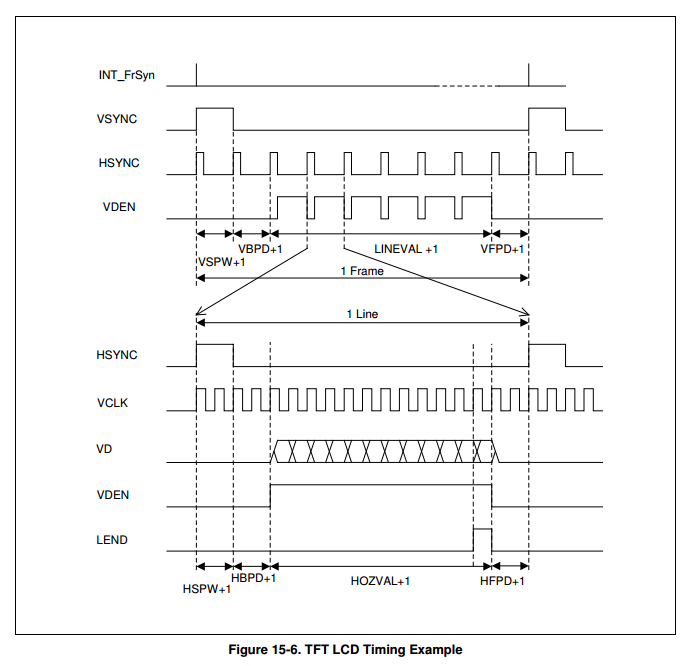
VSPW: 垂直同步脉冲宽度 pulse widch
VBPD: 垂直脉冲后沿延迟(用来等待LCD模块响应的时间) back delay
VFPD: 垂直脉冲前沿延迟(用来等待LCD模块响应的时间) Front delay
HSPW: 行同步脉冲宽度 pulse widch
HBPD: 行脉冲后沿延迟(用来等待LCD模块响应的时间) back delay
HFPD: 行脉冲前沿延迟(用来等待LCD模块响应的时间) Front delay
LINEVAL:行数,用来决定垂直尺寸,对于4.3寸时,LINEVAL=272-1
HOZVAL:行数,用来决定水平像素点个数,对于4.3寸时,HOZVAL=480-1
2.3 查看 LCD芯片手册时序图,计算周期时间:

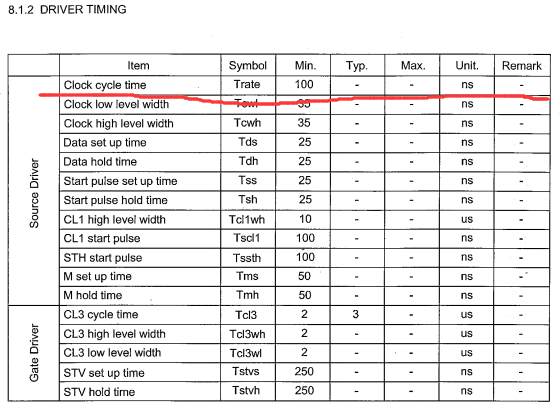
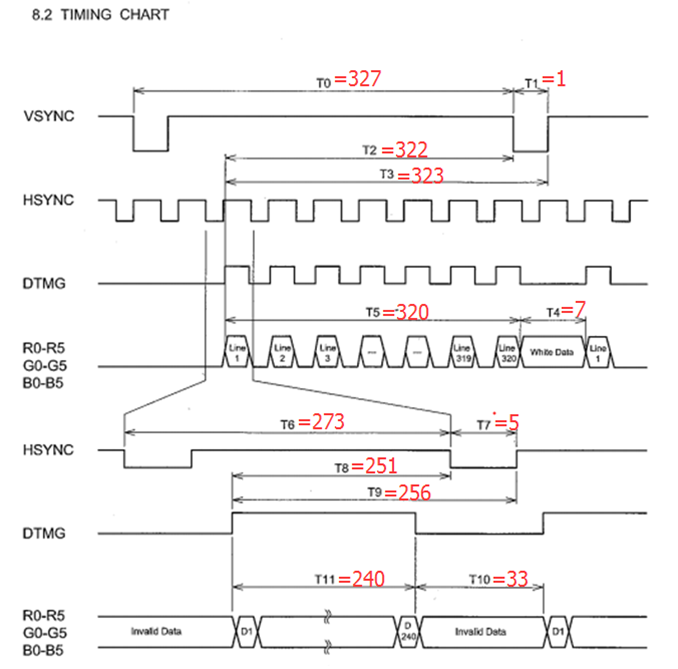
从上图2中得到时钟周期为10Mhz(100ns)
通过图1和图3计算出:
HSPW+1=T7=5 clock
HFPD+1=T8-T11=11 clock
HBPD+1=T6-T7-T8=17 clock
VSPW+1=T1=1 Line
VFPD+1=T2-T5=2 Line
VBPD+1=T0-T2-T1=4 Line
2.4 配置LCDCON1~5
根据上面就先来定义全局变量:
#define HSPW_16bpp 5-1
#define HFPD _16bpp 11-1
#define HBPD _16bpp 17-1
#define VSPW _16bpp 1-1
#define VFPD _16bpp 2-1
#define VBPD _16bpp 4-1
设置LCDCON1寄存器:
CLKVAL[17:8]:
设置VCLK时钟, CLKVAL =HCLK/(LCD时钟*2)-1
本裸板的HCLK=100Mhz,LCD时钟=10MHZ,所以CLKVAL =4
PNRMODE [6:5]:
设置为TFT模式,PNRMODE =0x3
BPPMODE[4:1]:
设置为16BPP, BPPMODE=0x0C
ENVID [0]:
控制PWREN信号(GPG4)输出,先配置好再输出PWREN, ENVID =0
(开启之前应该设置LCDCON5位[3]允许PWREN信号才有效)
设置LCDCON2寄存器:
VBPD [31:24]:垂直脉冲后沿延时, VBPD=VBPD_16bpp;
LINEVAL[23:14]:垂直行数,决定垂直大小, LINEVAL=272-1;
VFPD[13:6]:垂直脉冲前沿延时, VFPD= VFPD_16bpp;
VSPW[5:0]:垂直同步脉冲宽度, VSPW= VSPW_16bpp;
设置LCDCON3寄存器:
HBPD[25:19]:水平脉冲后沿延时, HBPD= HBPD_16bpp;
HOZVAL[18:8]:水平像素点个数, HBPD= 479;
HFPD[7:0]:水平脉冲前沿延时, HFPD= HFPD_16bpp;
设置LCDCON4寄存器:
HSPW[7:0]:水平同步脉冲宽度, HSPW = HSPW_16bpp;
设置LCDCON5寄存器:
FRM565[11]:设置16bpp输出格式, FRM565=1(RGB565);
INVVCLK[10]:设置VCLK记性,LCD手册如下,所以等于0,不设置(下降沿读取数据)
INVVLINE [9]:HSYNC水平同步信号反转, 因为LCD手册和2440手册不一样,所以INVVLINE=1;
INVVFRAME[8]:VSYNC垂直同步信号反转, 因为LCD手册和2440手册不一样,所以INVVFRAME =1;
INVVFRAME[3]:PWREN信号(GPG4)允许位,=0,不设置,等设置了缓存寄存器后才设置
HWSWP [0]:更改存储格式,这里HWSWP=1,BSWP[1]默认等于0,使我们的LCD像素显示从低到高排列
代码如下:
LCDCON1 = (4<<8) | (0X3<<5) | (0x0C <<1) | (0<<0);
LCDCON2 = ((VBPD_16bpp)<<24) | (271<<14) | ((VFPD_16bpp)<<6) |((VSPW_16bpp)<<0);
LCDCON3 = ((HBPD_16bpp)<<19) | (479<<8) | ((HFPD_16bpp));
LCDCON4 = (HSPW_16bpp);
LCDCON5 = (1<<11) | (1<<9) | (1<<8) | (1<<0);
LCDCON1 &=~(1<<0); // 关闭PWREN信号输出
LCDCON5 &=~(1<<3); //禁止PWREN信号
3.设置LCDSADDR1~3缓冲地址寄存器
设置LCDSADDR1寄存器:
LCDBANK[29:21]:
保存缓冲起始地址A[30:22]
LCDBASEU[20:0]:
保存缓冲起始地址A[21:1]
设置LCDSADDR2寄存器:
LCDBASEL[20:0]:
保存存缓冲结束地址A[21:1],这里我们 采用4.3寸LCD,所以等于((0x30400000+(480)*(272)*2)>>1)&0x1fffff; 这里*2是代表一个像素占了2字节,若是8bpp模式,则就不需要乘以2
设置LCDSADDR3寄存器:
OFFSIZE[21:11]:
保存LCD上一行结尾和下一行开头的地址之间的差(半字数为单位),我们使用的是连续地址,所以不设置,默认为0
PAGEWIDTH [10:0]:
保存LCD一行占的宽度(半字数为单位),我们每个像素点是半字数,所以等于480
代码如下:
LCDSADDR1 = ((0x30400000>>)<<) | ((0x30400000>>)& 0x1fffff);
LCDSADDR2 = ((0x30400000+()*()*)>>)& 0x1fffff;
LCDSADDR3 = (<<) | (*/);
4.允许并输出PWREN信号
GPGCON = (GPGCON & (~(<<))) | (<<); // GPG4用作LCD_PWREN
GPGUP = (GPGUP & (~(<<))) | (<<); // 禁止内部上拉 LCDCON5 = (LCDCON5 & (~(<<))) | (<<); // 设置LCD_PWREN的极性: 正常
LCDCON5 = (LCDCON5 & (~(<<))) | (<<); // 允许LCD_PWREN信号输出 LCDCON1 |= ; //输出LCD_PWREN信号
5.驱动LCD显示白色
fb_base_addr=0x30400000; //缓存起始地址
LCDCON1 |= 1; // 使能LCD驱动
GPBDAT |= (1<<0); // 开背光
color=0xffffff; //显示白色颜色
for (y = 0; y < 272; y++) //向缓存地址里存数据
for (x = 0; x < 480; x++)
{
UINT16 *addr = (UINT16 *)fb_base_addr + (y * 480 + x); //定义指针变量等于缓存地址
red = (color >> 19) & 0x1f;
green = (color >> 10) & 0x3f;
blue = (color >> 3) & 0x1f;
color = (red << 11) | (green << 5) | blue; // 格式5:6:5
*addr = (UINT16) color; //addr表示缓存地址,*addr表示缓存地址里的变量,
}
LCDCON1 &= 0x3fffe; // 失能LCD驱动
GPBDAT &= ~(1<<0); // 关背光
6.TPAL临时调色板寄存器介绍
当清屏时,可以使用TPAL寄存器,快速清屏
位[24] TPAL使能位
位[23:0] RGB数据位
例如: TPAL=0x1ffffff (使能TPAL寄存器,并设为白色屏)
裸机LCD驱动配置的更多相关文章
- Smart210学习-----lcd驱动
帧缓冲设备 1.1帧缓冲设备:帧缓冲(framebuffer)是 Linux 系统为显示设备提供的一个接口,它将显示缓冲区抽象,屏蔽图像硬件的底层差异,允许上层应用程序在图形模式下直接对显示缓冲区进行 ...
- lcd驱动框架
目录 lcd驱动框架 框图 程序分析 入口 打开open 读read 初始化registered_fb 注册 小结 程序设计 测试 方式一操作fb0 方式二操作tty 方式三操作终端 完整程序 tit ...
- Linux驱动之LCD驱动编写
在Linux驱动之内核自带的S3C2440的LCD驱动分析这篇博客中已经分析了编写LCD驱动的步骤,接下来就按照这个步骤来字尝试字节编写LCD驱动.用的LCD屏幕为tft屏,每个像素点为16bit.对 ...
- 嵌入式Linux驱动学习之路(十八)LCD驱动
驱动代码: /************************************************************************* > File Name: lcd ...
- S3C2440 LCD驱动(FrameBuffer)实例开发<一>(转)
1. 背景知识 在多媒体的推动下,彩色LCD越来越多地应用到嵌入式系统中,PDA和手机等大多都采用LCD作为显示器材,因此学习LCD的应用很有实际意义! LCD工作的硬件需求:要使一块LCD正常的显示 ...
- 单片机模拟 1/2 Bias、1/4 Duty的 LCD 驱动使用方法
工作原理 方式一 根据 LCD 的驱动原理可知,LCD 像素点上只能加上 AC 电压,LCD 显示器的对比度由 COM脚上的电压值减去 SEG 脚上的电压值决定,当这个电压差大于 LCD 的饱 ...
- sc7731 Android 5.1 LCD驱动简明笔记之一
基于展讯sc7731 - Android 5.1 代码分析浏览.将屏蔽细节,把握整体,并且不涉及其他设备和LCD的交互. 以下对sc7731 lcd大体流程进行简要说明. 第一,lcd 的两个阶段 1 ...
- android系统平台显示驱动开发简要:LCD驱动调试篇『四』
平台信息: 内核:linux3.4.39系统:android4.4 平台:S5P4418(cortex a9) 作者:瘋耔(欢迎转载,请注明作者) 欢迎指正错误,共同学习.共同进步!! 关注博主新浪博 ...
- LCD驱动(FrameBuffer)实例开发讲解
一.开发环境 主 机:VMWare--Fedora 9 开发板:Mini2440--64MB Nand, Kernel:2.6.30.4 编译器:arm-linux-gcc-4.3.2 二.背景知识 ...
随机推荐
- 暑假OI规划
为了准备11月的NOIP(最好能到550+)暑假要认真的刷题: 1.NOIP的原题 2.USACO历年的GOLD 3.CF的比赛 4.刷几本书 5.带着做bzoj(lydsy) 6.少玩游戏
- 正则表达式大全 --【Python举例】
包含 : 纯文字.正负数,小数.正数.正整数.月份.天数.用户名.密码.车牌.传真.手机.邮件.ipv4私有地址.ipv4地址.ipv6地址.json_header.request_header 有 ...
- Java 垃圾回收算法
在之前Java 运行期数据区一文中,介绍了运行时内存的各个部分.其中程序计数器.虚拟机栈.本地方法栈都随线程消亡,所以,这几个区域的内存分配和回收都具备确定性.而 Java 堆和方法区不同,我们只有在 ...
- 如何调节Eclipse下console输出字体的大小??
打开window - preferences-- general - appearance - colors and fonts --debug - console font 就可以调节了.
- Selenium对于对话框alert,confirm,prompt的处理
html 源码: <html> <head> <title>Alert</titl ...
- Alpha版与Beta版
简单说说这两个词的意思,以后会稍加更多的补充. Alpha版意在对少数主要客户和市场进行数量有限的分发,用于演示目的的早期构造.其无意在实际环境中使用.使用Alpha版的所有人员必须了解确切内容和质量 ...
- 关于mac下配置mysql心得
PS:配置一个mysql烦了一天,不过还是有所收获. 首先,下载安装我就不多啰嗦了.关键是在我们安装的最后会有一个临时密码,例如我的PBxsy=ES71(u: 这是非常重要的信息,如果没有得到的话,建 ...
- 社群系统 ThinkSNS+ 中如何利用 Laravel 表单验证来验证用户名的?(我朝独有需求,两个字母占一个汉字。。。)
ThinkSNS+后端框架使用laravel,每周和 laravel master 保持同步,而后台和 html 5 则采用 vue 开发.语言特性方面,采用 php 7 的严格模式. 言归正传,之所 ...
- freemarker 集成 sitemesh 装饰html页面 shiro 标签
guest标签:验证当前用户是否为"访客",即未认证(包含未记住)的用户: shiro标签:<shiro:guest></shiro:guest> : ...
- Eclipse快捷键:同时显示两个一模一样的代码窗口
如图: 同样的一个HTML文件,在代码编辑窗口,显示两个. 快捷键: Ctrl + Shift + -(减号) 既可以展示两个,也可以只显示一个 附加一个快捷键: Ctrl + Shift + ...