十天学会单片机Day1点亮数码管(数码管、外部中断、定时器中断)
1.引脚定义
| 标号 | 引脚 | 第二功能 | 说明 |
| P3.0 | 10 | RXD | 串行输入口 |
| P3.1 | 11 | TXD | 串行输出口 |
| P3.2 | 12 | INT0(上划线) | 外部中断0 |
| P3.3 | 13 | INT1(上划线) | 外部中断1 |
| P3.4 | 14 | T0 | 定时器/计数器0 外部输入端 |
| P3.5 | 15 | T1 | 定时器/计数器1 外部输入端 |
| P3.6 | 16 | WR(上划线) | 外部数据存储器写脉冲 |
| P3.7 | 17 | RD(上划线) | 外部数据存储器读脉冲 |
XTAL1(19脚) XTAL2(18脚):外接时钟引脚。XTAL1为片内震荡电路的输入端,XTAL2为片内震荡电路的输出端。
8051时钟两种方式:①片内时钟震荡,两引脚外接晶振和震荡电容。
②外部时钟方式,XTAL1接地,外部时钟信号从XTAL2脚输入。
RST(9脚):单片机复位引脚。当输入连续两个机器周期以上高电平时为有效。复位后程序计数器PC=0000H,读取第一条指令码。即从头开始执行程序。
ALE(30脚):在没有外部存储器期间,ALE以1/6振荡周期频率输出(6分频),当访问外部存储器时,以1/12振荡周期输出(12分频)。
EA(上划线)(31脚):接高电平时,单片机读取内部程序存储器。接低电平,单片机直接读取外部(ROM)。(板子上直接接高)
P0口(39~32脚):双向8位三态I/O口,早期51芯片内部无上拉电阻,为高阻态,需外部接上拉电阻。
P1口(1~8脚):准双向8位I/O口,之所以称它为"准双向",是因为改口作为输入使用前,要先向该口进行写1操作,有个"准"备过程,称为准双向口。
P2口(21~28脚):准双向8位I/O口。
P3口(10~17脚):准双向8位I/O口。
2.复位电路
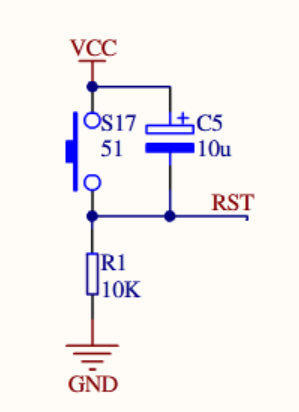
按键按下,RST=5V,按键时长大于两个时钟周期,则复位。
上电自动复位:上电瞬间,电容充电,之后电容放电,τ = √(RC) >两个时钟周期 ,自动复位。
3.晶振
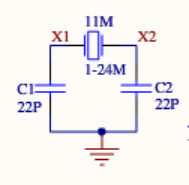
非极性电容,上电帮助晶振起振。12M左右 30pf,6M左右20pf。具体参考厂家提供的晶振要求负载电容选值。(Day0有详细介绍)
4.数码管
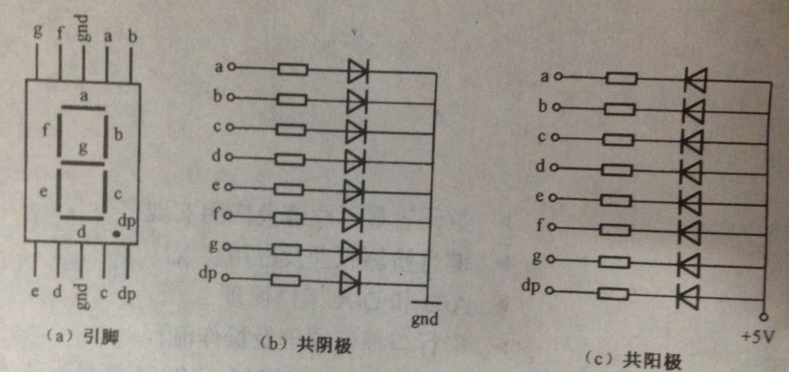
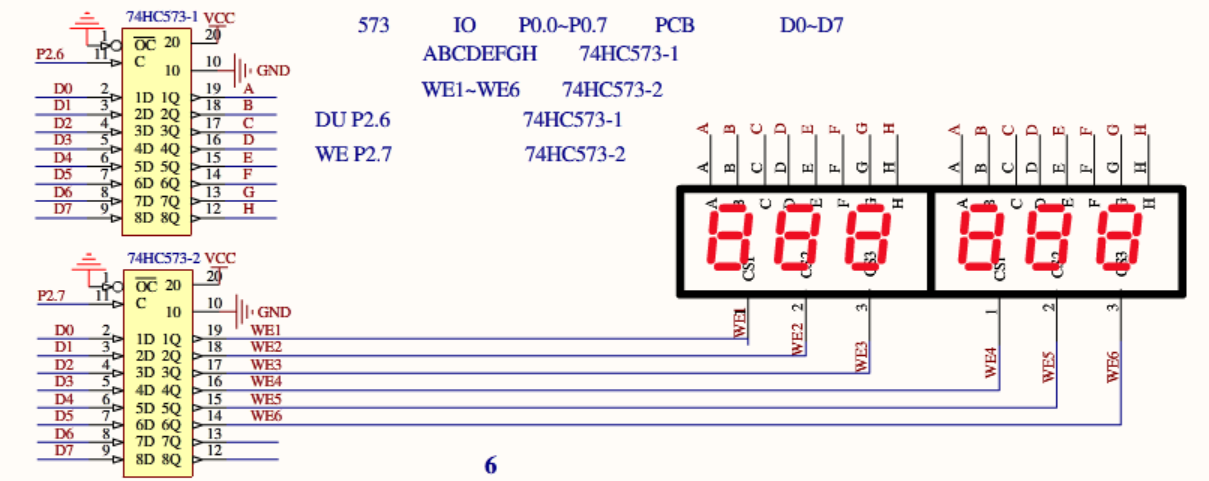
开发板中用的为共阴极。即WE选信号给低,则导通(WE提供一个GND作用)。
利用74HC573锁存器的锁存功能。(详细见Day0 ⑤锁存器),先控制位选信号P2.7口高,选定哪个数码管,后P2.7低锁存。再控制段选信号P2.6高,亮什么数字后,P2.6低锁存。
//共阴极数码管静态显示1
#include <reg52.h>
sbit DUAN = P2^;
sbit WE = P2^; int main()
{
WE = ; //打开WE选信号
P0 = 0xDF; //选WE6的数码管,给低,其余给高
WE = ; //关闭WE选信号
DUAN = ; //打开段选信号
P0 = 0x06; //亮1,即bc接高,其余低
DUAN = ; //关闭段选信号 return ;
}
 超级亮,但是别的数码管有淡淡的光,以下进行改进
超级亮,但是别的数码管有淡淡的光,以下进行改进
//共阴极数码管静态显示1 防干扰
#include <reg52.h>
sbit DUAN = P2^;
sbit WE = P2^; int main()
{
WE = ;
P0 = 0xDF;
WE = ;
P0 = 0xFF; //关闭所有显示,防止打开段选后发生混乱
DUAN = ;
P0 = 0x06;
DUAN = ;
P0 = 0xFF; //关闭所有显示,防止打开位选后发生混乱 return ;
}
接下来是数码管的动态扫描,其实是一个个显示,由于频率太快,人眼无法识别,达到目的。
//共阴极数码管动态显示
#include <reg52.h>
sbit DUAN = P2^;
sbit WE = P2^;
unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71};
unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF};
void delayms(unsigned int n);
int main()
{
unsigned int i = ;
while()
{
for(i = ; i < ; i++) {
DUAN = ;
P0 = DuanTable[i+];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[i];
WE = ;
P0 = 0xFF;
delayms();
}
}
return ;
} void delayms(unsigned int n) //误差 -0.651041666667us
{
unsigned char a,b;
unsigned int i;
for(i = ; i < n; i++) {
for(b=;b>;b--)
for(a=;a>;a--);
}
}

5.中断
52单片机共有6个中断源
INT0:外部中断0.由P3.2端口线引入,低电平或下降沿引起。
INT1:外部中断1.由P3.3端口线引入,低电平或下降沿引起。
T0:定时器/计数器0中断,由T0计数器计满回零引起。
T1:定时器/计数器1中断,由T1计数器计满回零引起。
T2:定时器/计数器2中断,由T2计数器计满回零引起。
TI/RI:串行口中断,串行端口完成一帧字符发送/接收后引起。
| 中断源 | 默认中断级别 | 序号(C语言用) | 入口地址(汇编语言用) |
| INT0 外部中断0 | 最高 | 0 | 0003H |
| T0 定时器/计数器0中断 | 第2 | 1 | 000BH |
| INT1 外部中断1 | 第3 | 2 | 0013H |
| T1 定时器/计数器1中断 | 第4 | 3 | 001BH |
| TI/RI 串行口中断 | 第5 | 4 | 0023H |
| T2 定时器/计数器2中断 | 最低 | 5 | 002BH |
|
位序号
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
|
说明
|
全局中断位
|
无效位
|
定时/计数2
(52单片机)
|
串行口中断
|
定时/计数1
|
外部中断1
|
定时/计数0
|
外部中断0
|
|
位符号(写程序时可直接引用)
|
EA
|
--
|
ET2
|
ES
|
ET1
|
EX1
|
ET0
|
EX0
|
|
位地址
|
AFH
|
--
|
ADH
|
ACH
|
ABH
|
AAH
|
A9H
|
A8H
|
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 说明 | 无效位 | 无效位 | 无效位 | 串行口中断优先级控制位 | 定时器/计数器1中断优先级控制位 | 外部中断1中断优先级控制位 | 定时器/计数器0中断优先级控制位 | 外部中断0中断优先级控制位 |
| 位符号 | -- | -- | -- | PS | PT1 | PX1 | PT0 | PX0 |
| 位地址 | -- | -- | -- | BCH | BBH | BAH | B9H | B8H |
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 位符号 | GATE | C/T(上划线) | M1 | M0 | GATE | C/T(上划线) | M1 | M0 |
| 定时器1 | 定时器0 | |||||||
单片机复位时全部清零。不可进行位寻址。
GATE:
GATE = 0 定时器/计数器启动与停止仅受TCON寄存器中TRX(X=0,1)来控制。
C/T(上划线):定时器模式和计数器模式选择位
C/T=0时为定时模式: 加1计数器对脉冲f进行计数,每来一个脉冲,计数器加1,直到计时器TFx满溢出。
C/T=1时为计数模式: 加1计数器对来自输入引脚T0(P3.4)和T1(P3.5)的外信号脉冲进行计数,每来一个脉冲,计数器加1,直到计时器TFx满溢出。
|
M1
|
M0
|
工作方式
|
功能说明
|
|
0
|
0
|
方式0
|
13位定时器/计数器
|
|
0
|
1
|
方式1
|
16位定时器/计数器
|
|
1
|
0
|
方式2
|
自动重载8位定时器/计数器
|
|
1
|
1
|
方式3
|
T0分为2个8位独立计数器,T1无方式3
|
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 位符号 | TF1 | TR1 | TF0 | TR0 | IE1 | IT1 | IE0 | IT0 |
| 位地址 | 8FH | 8EH | 8DH | 8CH | 8BH | 8AH | 89H | 88H |
| 定时器/计数器控制 | 外部中断控制 | |||||||
//外部中断0 低电平触发
#include <reg52.h>
sbit DUAN = P2^;
sbit WE = P2^;
unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71};
unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF};
void delayms(unsigned int n);
int main()
{
unsigned int i = ;
EA = ;//打开总中断
EX0 = ;//打开外部中断0中断
//IT0 = 0; 电平触发 由于TCON在复位时自动清零,所以可以省略
while()
{
for(i = ; i < ; i++) {
DUAN = ;
P0 = DuanTable[i+];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[i];
WE = ;
P0 = 0xFF;
delayms();
}
}
return ;
} void delayms(unsigned int n) //误差 -0.651041666667us
{
unsigned char a,b;
unsigned int i;
for(i = ; i < n; i++) {
for(b=;b>;b--)
for(a=;a>;a--);
}
} void exter0() interrupt //中断函数无需在main前声明 中断全部显示0 P3,2口INT0
{
int i = ;
for(i = ; i < ; i++) {
DUAN = ;
P0 = DuanTable[];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[i];
WE = ;
P0 = 0xFF;
delayms();
}
}
 中断ing
中断ing
//定时器0中断 方式1 中断显示0
#include <reg52.h>
sbit DUAN = P2^;
sbit WE = P2^;
unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71};
unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF};
unsigned int t = ;
void delayms(unsigned int n);
int main()
{
unsigned int i = ;
TMOD = 0x01; //TMOD不能位寻址 定时器0工作方式1
TH0 = ( - ) / ;
TL0 = ( - ) % ;
EA = ;//打开总中断
ET0 = ;//打开定时器0中断
TR0 = ;
while()
{
for(i = ; i < ; i++) {
DUAN = ;
P0 = DuanTable[i+];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[i];
WE = ;
P0 = 0xFF;
delayms();
}
if(t >= ) {
for(i = ; i < ; i++) {
DUAN = ;
P0 = DuanTable[];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[i];
WE = ;
P0 = 0xFF;
delayms();
}
if(t >= )
t = ;
}
}
return ;
} void delayms(unsigned int n) //误差 -0.651041666667us
{
unsigned char a,b;
unsigned int i;
for(i = ; i < n; i++) {
for(b=;b>;b--)
for(a=;a>;a--);
}
} void T0_Time() interrupt //中断函数无需在main前声明 中断全部显示0 P3,2口INT0
{
TH0 = ( - ) / ;
TL0 = ( - ) % ;
t++;
}
practice:
59s循环计时。
//60s倒计时 定时器0中断+数码管显示
#include <reg52.h>
sbit DUAN = P2^;
sbit WE = P2^;
unsigned char DuanTable[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71};
unsigned char WeTable[] = {0xFE,0xFD,0xFB,0xF7,0xEF,0xDF};
unsigned int t = , num = ;
void delayms(unsigned int n);
int main()
{
unsigned int i = ;
TMOD = 0x01; //TMOD不能位寻址 定时器0工作方式1
TH0 = ( - ) / ;
TL0 = ( - ) % ;
EA = ;//打开总中断
ET0 = ;//打开定时器0中断
TR0 = ;
while()
{
//十位数
DUAN = ;
P0 = DuanTable[num/];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[];
WE = ;
P0 = 0xFF;
delayms(); //个位数
DUAN = ;
P0 = DuanTable[num%];
DUAN = ;
P0 = 0xFF;
WE = ;
P0 = WeTable[];
WE = ;
P0 = 0xFF;
delayms(); }
return ;
} void delayms(unsigned int n) //误差 -0.651041666667us
{
unsigned char a,b;
unsigned int i;
for(i = ; i < n; i++) {
for(b=;b>;b--)
for(a=;a>;a--);
}
} void T0_Time() interrupt //中断函数无需在main前声明 中断全部显示0 P3,2口INT0
{
TH0 = ( - ) / ;
TL0 = ( - ) % ;
t++;
if(t >= ) {
num--;
t = ;
} if(num == )
num = ;
}
十天学会单片机Day1点亮数码管(数码管、外部中断、定时器中断)的更多相关文章
- 十天学会单片机Day0点亮LED (锁存器、三极管、继电器)
C51常用的数据类型 数据类型 关键字 所占位数 表示数范围 无符号字符型 unsigned char 8 0~255 有符号字符型 char 8 -128~127 无符号整型 unsigned in ...
- 《十天学会单片机和C语言编程》
<十天学会单片机和C语言编程> 大家注意了这个文件只有最新版迅雷可以下载,下面的lesson几就是第几课.点击右键使用迅雷下载. ed2k://|file|[十天学会单片机和C语言编程]. ...
- 十天学会单片机Day4串行口通信
并行与串行基本通信方式 1.并行通信方式 通常是将数据字节的各位用多条数据线同时进行传送. 并行通信控制简单.传输速度快:由于传输线较多,长距离传送时成本高且接收方的各位同时接收存在困难. 2.串行通 ...
- 十天学会单片机Day3 D/A与A/D转换器
D/A转换器 1.二进制权电阻网络型D/A转换器 基准电压Vref 数据D(d3d2d1d0) 输出模拟电压V0 i0 = Vref/8R i1 = Vref/4R i2 = Vref/ ...
- 十天学会单片机Day2键盘检测(独立键盘、矩阵键盘)
1.键盘的分类 编码键盘:键盘上闭合键的识别由专用的硬件编码器实现,并产生键编码号或键值的称为编码键盘,如计算机键盘 非编码键盘:靠软件编程来识别的称为非编码键盘.独立键盘.矩阵键盘 2.按键消抖 ...
- 十天学会单片机Day5 IIC总线AT2402芯片(EEPROM)应用
1.采用串行总线技术可以使系统的硬件设计大大简化.系统的体积减小.可靠性提高.同时,系统的更改和扩充极为容易. 常用的串行扩展总线有: IIC (Inter IC BUS)总线.单总线(1-WIRE ...
- 十天学会单片机Day6 学会看数据手册 (IIC总线PCF859芯片( A/D D/A)应用)
1.实际电路 2.引脚图 3.地址 高四位为固定地址1001,A2A1A0可编程地址,通过观察实际电路,可知A2A1A0 为000.最低位为读写为,1为读,0为写. 4.控制字 控制寄存器的高半字节用 ...
- 十年学会编程 著者: Peter Norvig 翻译: Dai Yuwen
为何人人都这么着急? 信步走进任何一家书店,你会看到名为<如何在7天内学会Java>的书,还有各 种各样类似的书: 在几天内或几小时内学会Visual Basic, Windows, In ...
- PHP学习过程_Symfony_(3)_整理_十分钟学会Symfony
这篇文章主要介绍了Symfony学习十分钟入门教程,详细介绍了Symfony的安装配置,项目初始化,建立Bundle,设计实体,添加约束,增删改查等基本操作技巧,需要的朋友可以参考下 (此文章已被多人 ...
随机推荐
- 安装和卸载windows程序
安装windows service通常有两种工具 1.Framework目录下的installutil.exe工具.2.visual studio命令行工具 在这里我要说的是当我们使用的系统是64位的 ...
- HIVE配置文件
进入HIVE_HOME/conf 编辑文件hive-site.xml,内容如下:(这是伪分布式模式) 主要声明了以下几个内容: 数据仓库地址 数据库连接地址 数据库连接驱动 数据库连接用户名 数据库连 ...
- 函数变量作用域(python)
收集参数:该参数个数不确定 >>> def test(*params): print('参数的长度是:', len(params)); print('第二个参数是:', params ...
- Android开发-API指南-任务和回退栈
Task and Back Stack 英文原文: http://developer.android.com/guide/components/tasks-and-back-stack.html 采集 ...
- url 参数的加号变成空格处理
今天在调试客户端向服务器传递参数时,参数中的“+”全部变成了空格,原因是URL中默认的将“+”号转义了. 解决方法如下: 方法一.修改客户端 将客户端带“+”的参数中的“+”全部替换为“2B%”,这 ...
- java.lang.NumberFormatException: For input string: "Y"
nested exception is org.apache.ibatis.exceptions.PersistenceException: ### Error querying database. ...
- 洛谷P2727 01串 Stringsobits
P2727 01串 Stringsobits 24通过 55提交 题目提供者该用户不存在 标签USACO 难度普及+/提高 提交 讨论 题解 最新讨论 这题的思路是啥啊!!!跪求- 题目背景 考虑 ...
- 09_platform-tools简介&常见adb指令
SDK下面的文件夹说明add-ons 附加的附属的一些信息.docs Android开发的帮助文件.extras 支持的jar包,高版本兼容底版本.google usb的驱动.platforms 存放 ...
- 二模08day1解题报告
T1.高中运动会(match) N个数的最大公约数. gcd不解释. T2.智力游戏 火柴棒等式形如a+b=c,现在给出啊a,b,c求使等式成立的最小的移动次数. 火柴棒表示数字不用解释了吧,在此提醒 ...
- 用Ossim管理IT资产(视频)
用Ossim管理IT资产 在Ossim中集成了Ocs Server,OCS用于帮助网络或系统管理员来跟踪网络中计算机配置与软件安装情况的应用程序.收集到硬件和系统信息,OCS Inventory 也可 ...