yolov5 损失函数代码详解

前言
模型的损失计算包括3个方面,分别是:
- 定位损失
- 分类损失
- 置信度损失
损失的计算公式如下:
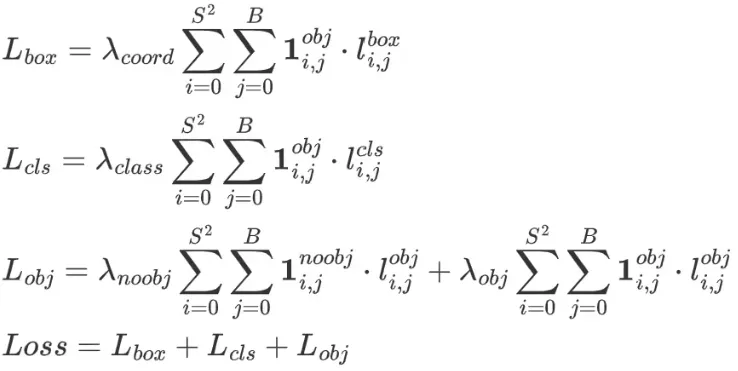
损失计算的代码流程也是按照这三大块来计算的。本篇主要讲解yolov5中损失计算的实现,包括损失的逻辑实现,张量操作的细节等。
准备工作
初始化损失张量的值,获取正样本的信息。
lcls = torch.zeros(1, device=self.device) # class loss
lbox = torch.zeros(1, device=self.device) # box loss
lobj = torch.zeros(1, device=self.device) # object loss
tcls, tbox, indices, anchors = self.build_targets(p, targets, imgs) # targets
其中获取正样本信息在前面一篇文章中已经详细的分析过流程。这里返回的结果分别是:
- tcls:保存类别id
- tbox:保存的是gt中心相对于所在grid cell左上角偏移量
- indices:image_id, anchor_id, grid x刻度 grid y刻度
- anchors:保存anchor的具体宽高
tcls, tbox, indices, anchors = self.build_targets(p, targets, imgs) # targets
遍历3种尺度,获取对应正样本的image_id,anchor_id,网格坐标xy。计算损失的大体思路是将3种尺度的损失值加在一起,所以这里分别处理每一种尺度。
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
从模型输出中筛选出正样本对应网格
b, a, gj, gi = indices[i]
pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
pi 的形状是 6 * 3 * 80 * 80 * 7,pi是模型推理的输出结果,代表着 6张图片,一张图片中有3种anchor的结果,每一个anchor下是 80 * 80 的网格,每一个网格下的结果有7个输出,分别是nc=5,类别数2。5是xywh+confidence。
(Pdb) pp pi.shape
torch.Size([6, 3, 80, 80, 7])
另外b、a、gj、gi等都是索引下标
b: image_id
a: anchor_id
gj: 网格y轴
gi: 网格x轴
Pdb) pp b
tensor([0, 0, 0, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 0, 0, 0, 0, 0, 0, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 5, 5, 0, 0, 0, 0, 0, 0, 0, 1, 1, 2, 2, 2, 2,
2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 5, 5, 5, 5, 0, 2, 2, 2, 2, 2, 2, 2, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 0, 1, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 0, 0, 1, 2, 2,
2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 0, 2, 2, 2, 2, 2, 2, 2, 2, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 0, 0, 0, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 5, 0, 0, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4,
4, 4, 5, 5, 5, 0, 2, 2, 2, 2, 2, 4, 4, 4, 4, 4, 4, 4, 0, 0, 0, 0, 1, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 5, 5, 0, 0, 0, 0, 0, 1, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 5, 5, 5, 5, 0, 0, 2, 2, 2, 2, 4, 4, 4, 4, 4, 4, 4, 0, 0, 0, 1, 2, 2, 2, 2, 3, 3,
3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 0, 0, 0, 0, 0, 1, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 5, 5], device='cuda:0')
(Pdb) pp a
tensor([0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2,
2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2,
2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2,
2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2], device='cuda:0')
(Pdb) pp gj
tensor([78, 74, 76, 13, 53, 54, 53, 53, 52, 52, 51, 50, 52, 52, 52, 76, 18, 18, 19, 17, 17, 18, 19, 17, 17, 17, 20, 19, 18, 18, 19, 23, 18, 41, 19, 39, 66, 67, 78, 74, 76, 15, 20, 13, 19, 57, 53, 54, 53, 53, 52, 52, 51, 50, 52, 52, 52, 31, 34, 34, 29, 34, 35, 29, 34, 76, 74, 74, 15, 14, 18, 18, 19, 17, 17, 18, 19, 17,
17, 17, 20, 19, 18, 18, 19, 23, 18, 41, 26, 32, 19, 42, 39, 42, 66, 67, 78, 74, 15, 20, 13, 19, 19, 57, 53, 54, 53, 53, 52, 52, 51, 50, 52, 52, 52, 31, 37, 34, 34, 29, 34, 35, 29, 34, 76, 74, 74, 75, 75, 15, 14, 18, 18, 19, 17, 17, 18, 19, 17, 17, 17, 20, 19, 18, 18, 19, 23, 18, 41, 46, 4, 31, 26, 32, 19, 74,
53, 53, 52, 51, 52, 52, 52, 76, 18, 19, 17, 17, 19, 17, 17, 20, 19, 19, 23, 19, 74, 15, 19, 53, 53, 52, 51, 52, 52, 52, 34, 29, 34, 76, 15, 18, 19, 17, 17, 19, 17, 17, 20, 19, 19, 23, 19, 42, 74, 15, 19, 53, 53, 52, 51, 52, 52, 52, 34, 29, 34, 76, 15, 18, 19, 17, 17, 19, 17, 17, 20, 19, 19, 23, 46, 19, 75, 52,
53, 52, 52, 51, 51, 49, 51, 75, 17, 17, 18, 16, 16, 18, 16, 19, 17, 18, 17, 18, 38, 65, 75, 14, 18, 56, 52, 53, 52, 52, 51, 51, 49, 51, 30, 28, 28, 75, 17, 17, 18, 16, 16, 18, 16, 19, 17, 18, 17, 31, 18, 38, 65, 14, 18, 56, 52, 53, 52, 52, 51, 51, 49, 51, 30, 28, 28, 75, 17, 17, 18, 16, 16, 18, 16, 19, 17, 18,
17, 45, 3, 31, 18, 78, 13, 54, 53, 52, 50, 18, 18, 17, 18, 18, 18, 41, 39, 66, 67, 78, 20, 13, 57, 54, 53, 52, 50, 31, 34, 34, 35, 29, 74, 74, 14, 18, 18, 17, 18, 18, 18, 41, 26, 32, 39, 42, 66, 67, 78, 20, 13, 19, 57, 54, 53, 52, 50, 31, 37, 34, 34, 35, 29, 74, 74, 75, 75, 14, 18, 18, 17, 18, 18, 18, 41, 4,
31, 26, 32, 79, 75, 14, 52, 53, 53, 19, 18, 18, 20, 19, 24, 42, 68, 79, 75, 21, 14, 52, 53, 53, 35, 35, 35, 36, 35, 75, 75, 16, 15, 19, 18, 18, 20, 19, 24, 42, 27, 43, 43, 68, 79, 75, 21, 14, 20, 52, 53, 53, 38, 35, 35, 35, 36, 35, 75, 75, 76, 76, 16, 15, 19, 18, 18, 20, 19, 24, 42, 32, 27], device='cuda:0')
(Pdb) pp gi
tensor([26, 73, 79, 51, 10, 16, 21, 25, 30, 36, 42, 44, 47, 52, 57, 56, 54, 24, 28, 33, 36, 40, 46, 60, 57, 52, 50, 48, 44, 37, 35, 39, 42, 6, 71, 50, 56, 11, 26, 73, 79, 10, 15, 51, 45, 62, 10, 16, 21, 25, 30, 36, 42, 44, 47, 52, 57, 62, 73, 79, 22, 1, 35, 13, 8, 56, 71, 2, 18, 3, 54, 24, 28, 33, 36, 40, 46, 60,
57, 52, 50, 48, 44, 37, 35, 39, 42, 6, 26, 10, 71, 9, 50, 39, 56, 11, 26, 73, 10, 15, 51, 45, 35, 62, 10, 16, 21, 25, 30, 36, 42, 44, 47, 52, 57, 62, 52, 73, 79, 22, 1, 35, 13, 8, 56, 71, 2, 20, 33, 18, 3, 54, 24, 28, 33, 36, 40, 46, 60, 57, 52, 50, 48, 44, 37, 35, 39, 42, 6, 41, 71, 45, 26, 10, 71, 72,
9, 20, 29, 41, 46, 51, 56, 55, 23, 27, 32, 35, 45, 59, 51, 49, 47, 34, 38, 70, 72, 9, 44, 9, 20, 29, 41, 46, 51, 56, 78, 21, 7, 55, 17, 23, 27, 32, 35, 45, 59, 51, 49, 47, 34, 38, 70, 8, 72, 9, 44, 9, 20, 29, 41, 46, 51, 56, 78, 21, 7, 55, 17, 23, 27, 32, 35, 45, 59, 51, 49, 47, 34, 38, 40, 70, 79, 10,
16, 21, 25, 30, 36, 44, 57, 56, 54, 24, 28, 33, 36, 46, 57, 50, 44, 35, 42, 71, 50, 56, 79, 10, 45, 62, 10, 16, 21, 25, 30, 36, 44, 57, 62, 22, 13, 56, 54, 24, 28, 33, 36, 46, 57, 50, 44, 35, 42, 10, 71, 50, 56, 10, 45, 62, 10, 16, 21, 25, 30, 36, 44, 57, 62, 22, 13, 56, 54, 24, 28, 33, 36, 46, 57, 50, 44, 35,
42, 41, 71, 10, 71, 27, 52, 17, 26, 37, 45, 55, 41, 58, 45, 38, 43, 7, 51, 57, 12, 27, 16, 52, 63, 17, 26, 37, 45, 63, 74, 2, 36, 14, 72, 3, 4, 55, 41, 58, 45, 38, 43, 7, 27, 11, 51, 40, 57, 12, 27, 16, 52, 36, 63, 17, 26, 37, 45, 63, 53, 74, 2, 36, 14, 72, 3, 21, 34, 4, 55, 41, 58, 45, 38, 43, 7, 72,
46, 27, 11, 26, 73, 51, 42, 47, 52, 40, 60, 52, 48, 37, 39, 6, 11, 26, 73, 15, 51, 42, 47, 52, 73, 79, 1, 35, 8, 71, 2, 18, 3, 40, 60, 52, 48, 37, 39, 6, 26, 9, 39, 11, 26, 73, 15, 51, 35, 42, 47, 52, 52, 73, 79, 1, 35, 8, 71, 2, 20, 33, 18, 3, 40, 60, 52, 48, 37, 39, 6, 45, 26], device='cuda:0')
通过这四个张量的索引,就能得到所有模型输出结果中的具体定位信息xywh+confidence+两个类别。
split 将结果拆分,分别得到pxy:预测中心点 pwh:预测宽高 pcls:预测类别
pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1)
因为b、a、gj、gi 是筛选出来的正样本,所以通过这一步就是获得了模型输出结果中,正样本网格对应的预测结果。方便后面和正样本中心点偏移量计算损失。
将原始预测信息还原成真实值
模型输出的结果是原始的预测结果,再计算损失值之前还需要将原始预测信息还原成真实值即boundingbox。
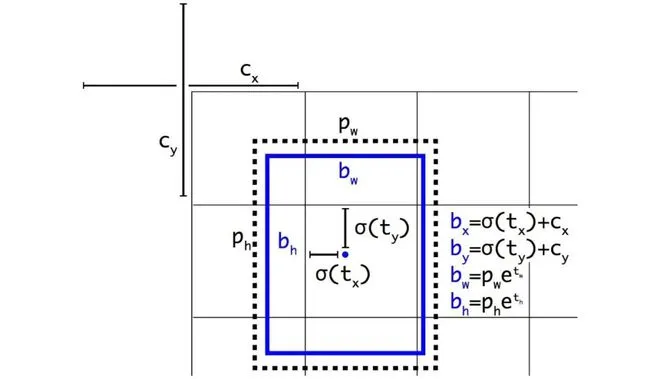
yolov5中计算预测真实值boundingbox的公式如下:
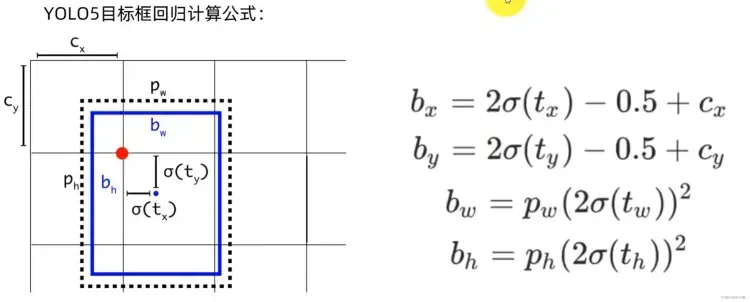
对应代码中首先将网络模型输出的结果通过sigmoid函数压缩到0-1之间,然后做对应的变换。
pxy = pxy.sigmoid() * 2 - 0.5
pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
pxy.sigmoid() * 2 - 0.5中pxy.sigmoid()取值范围为[0,1],那么pxy 变换结果的范围是[-0.5, 1.5],这表明坐标点可以超越该grid cell,出现在网格以外。这么设计的原因是当目标落在边界上时往往预测会比较困难,因为将参数回归到0或1比较难。但是如果预测的极限不在0,1,而是-0.5,1.5,那么边界上的预测就相对容易。
(pwh.sigmoid() * 2) ** 2 变换结果的范围是[0, 4],表示可以预测的范围是anchor的宽高的0倍至4倍。
注意:中心点xy的坐标是相对网格左上角的偏移量,而宽高的取值是相对anchor的比例。
定位损失
yolov5中定位损失使用的是CIOU 。关于CIOU损失的详解可以参考这篇文章
优化改进YOLOv5算法之添加GIoU、DIoU、CIoU、EIoU、Wise-IoU模块(超详细)_yolov5使用giou-CSDN博客
iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
CIOU的计算公式如下:

iou张量计算完成之后,再用1减去iou,去均值得到损失值。理解上面的公式再看下面的代码就会发现代码其实就是实现了公式的逻辑。
具体iou的计算过程如下:
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
# Get the coordinates of bounding boxes
if x1y1x2y2: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
else: # transform from xywh to xyxy
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
# Intersection area 交集
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area 并集
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
# 得到交并比IOU
iou = inter / union
if GIoU or DIoU or CIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
(b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
if DIoU:
return iou - rho2 / c2 # DIoU
elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU
else:
return iou # IoU
置信度损失
置信度损失的一个特点就是需要正负样本都参与计算,所以正样本和负样本都有置信度。
- 正样本置信度:用预测框和标注框的DIOU结果作为正样本置信度
- 负样本置信度:为0
复制iou张量,生成一个不参与梯度计算的张量,并将iou的值都限制在0以上,小于0的会赋值为0,最后将所有元素的类型修改成和tobj一致。
iou = iou.detach().clamp(0).type(tobj.dtype)
对iou排序,排序之后 如果同一个grid出现两个gt 那么我们经过排序之后每个grid中的score_iou都能保证是最大的。(小的会被覆盖 因为同一个grid坐标肯定相同)。那么从时间顺序的话, 最后1个总是和最大的IOU去计算LOSS
if self.sort_obj_iou:
j = iou.argsort()
b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
通过gr用来设置IoU的值在objectness loss中做标签的比重。gr = 1 表示IOU是objectness的全部,gr < 1 表示iou的部分作为ogjectness
# 通过gr用来设置IoU的值在objectness loss中做标签的比重。
# gr = 1 表示IOU是objectness的全部,gr < 1 表示iou的部分作为ogjectness
if self.gr < 1:
iou = (1.0 - self.gr) + self.gr * iou
注意下面这一部分不是按照代码的顺序,而是按照逻辑的顺序,用BCE loss完成损失值的计算。
pi[...,4] 是预测置信度,tboj是标注文件置信度,其中正样本用iou来填充,上面也详细说过,负样本都是0。
# 处理了正样本的置信度,用iou来做置信度。除了正样本之外,其他都是负样本,置信度都为0
tobj[b, a, gj, gi] = iou # iou ratio
obji = self.BCEobj(pi[..., 4], tobj)
自动更新各个feature map的置信度损失系数
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
类别损失
类别损失只有正样本参与计算。类别损失的正样本并不是0,而是通过平滑标签得到的一个近似1的值。
平滑标签介绍:
通常情况下,正确的边界框分类是用类的独热向量[0,0,0,1,0,0,…]来表示,并据此计算损失函数。
one-hot 编码存在的问题:
- 倾向于让模型更加“武断”,成为一个“非黑即白”的模型,导致泛化性能差;
- 面对易混淆的分类任务、有噪音(误打标)的数据集时,更容易受影响。
根据这种直觉,对类标签表示进行编码以在某种程度上衡量不确定性更为合理。通常情况下,作者选择0.9,所以用[0,0,0,0.9,0…]来代表正确的类。
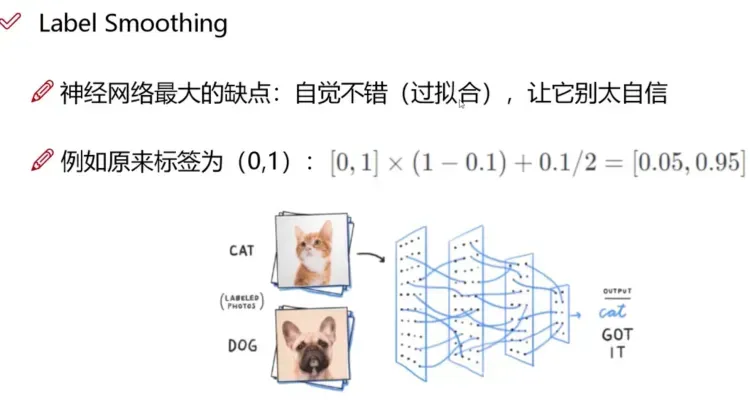
平滑标签的计算过程,默认情况下正样本:0.95, 负样本:0.05
self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
# return positive, negative label smoothing BCE targets
return 1.0 - 0.5 * eps, 0.5 * eps
给正样本置信度赋值0.95之后,使用BCE loos计算函数,将预测值pcls和真实值t送入计算,得到结果lcls。
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
# self.cn通过smooth_BCE平滑标签得到的,使得负样本不再是0,而是0.5 * eps
t = torch.full_like(pcls, self.cn, device=self.device) # targets
# self.cp 是通过smooth_BCE平滑标签得到的,使得正样本不再是1,而是1.0 - 0.5 * eps
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(pcls, t) # BCE
汇总损失值
根据超参中的损失权重参数 对各个损失进行平衡 防止总损失被某个损失所左右,
最后将3个损失值相加,并乘上bs,得到整个batch的总损失
lbox *= self.hyp['box']
lobj *= self.hyp['obj']
lcls *= self.hyp['cls']
bs = tobj.shape[0] # batch size
return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
到这里损失函数的计算就完成了。
Q&A
yolov5 bbox 相对于yolov3 计算方式的变化的原因是什么?
yolov3的边界框回归:
yolov5的边界框回归:
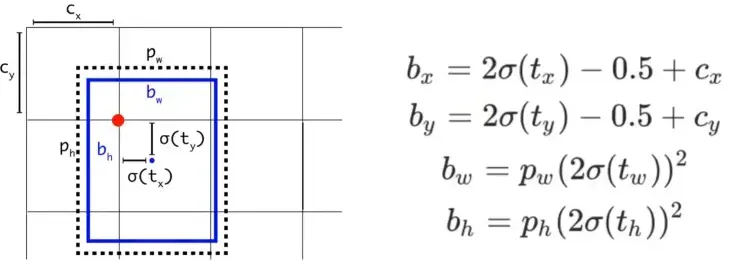
yolov5相对于yolov3主要改进有两个:
- 对中心点扩大范围,预测范围突破gt所在网格,扩展到左右0.5个网格
- 对宽高度加以限制,防止梯度失控。yolov3的e的n次方会呈指数上升,导致梯度过大。yolov5将宽高限制在0-4倍之间。
完整代码
附完整注释代码
def __call__(self, p, targets, imgs=None): # predictions, targets
lcls = torch.zeros(1, device=self.device) # class loss
lbox = torch.zeros(1, device=self.device) # box loss
lobj = torch.zeros(1, device=self.device) # object loss
tcls, tbox, indices, anchors = self.build_targets(p, targets, imgs) # targets
"""
tcls 保存类别id
tbox 保存的是gt中心相对于所在grid cell左上角偏移量。也会计算出gt中心相对扩展anchor的偏移量
indices 保存的内容是:image_id, anchor_id, grid x刻度 grid y刻度
anchors 保存anchor的具体宽高
"""
# Losses
"""
(Pdb) pp p[0].shape
torch.Size([1, 3, 80, 80, 7])
(Pdb) pp p[1].shape
torch.Size([1, 3, 40, 40, 7])
(Pdb) pp p[2].shape
torch.Size([1, 3, 20, 20, 7])
(Pdb) pp targets.sh
"""
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
# pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
# 在这里就筛选出来了正样本相对应的预测结果
pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
# Regression
pxy = pxy.sigmoid() * 2 - 0.5
pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
"""
pbox 的xy相对于grid cell做了归一化处理 wh则是相对anchor所在feature map做的处理
同样 tbox 的xy也是相对grid cell 做的归一化处理,wh则没有做。
如何将同一个anchor下的box对应起来呢?通过筛选出来的正样本完成
"""
iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
j = iou.argsort()
b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
# 通过gr用来设置IoU的值在objectness loss中做标签的比重。
# gr = 1 表示IOU是objectness的全部,gr < 1 表示iou的部分作为objectness
if self.gr < 1:
iou = (1.0 - self.gr) + self.gr * iou
# 处理了正样本的置信度,用iou来做置信度
tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
# self.cn通过smooth_BCE平滑标签得到的,使得负样本不再是0,而是0.5 * eps
t = torch.full_like(pcls, self.cn, device=self.device) # targets
# self.cp 是通过smooth_BCE平滑标签得到的,使得正样本不再是1,而是1.0 - 0.5 * eps
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(pcls, t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
# [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp['box']
lobj *= self.hyp['obj']
lcls *= self.hyp['cls']
bs = tobj.shape[0] # batch size
return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
yolov5 损失函数代码详解的更多相关文章
- Kaggle网站流量预测任务第一名解决方案:从模型到代码详解时序预测
Kaggle网站流量预测任务第一名解决方案:从模型到代码详解时序预测 2017年12月13日 17:39:11 机器之心V 阅读数:5931 近日,Artur Suilin 等人发布了 Kaggl ...
- DeepLearning tutorial(3)MLP多层感知机原理简介+代码详解
本文介绍多层感知机算法,特别是详细解读其代码实现,基于python theano,代码来自:Multilayer Perceptron,如果你想详细了解多层感知机算法,可以参考:UFLDL教程,或者参 ...
- BM算法 Boyer-Moore高质量实现代码详解与算法详解
Boyer-Moore高质量实现代码详解与算法详解 鉴于我见到对算法本身分析非常透彻的文章以及实现的非常精巧的文章,所以就转载了,本文的贡献在于将两者结合起来,方便大家了解代码实现! 算法详解转自:h ...
- ASP.NET MVC 5 学习教程:生成的代码详解
原文 ASP.NET MVC 5 学习教程:生成的代码详解 起飞网 ASP.NET MVC 5 学习教程目录: 添加控制器 添加视图 修改视图和布局页 控制器传递数据给视图 添加模型 创建连接字符串 ...
- Github-karpathy/char-rnn代码详解
Github-karpathy/char-rnn代码详解 zoerywzhou@gmail.com http://www.cnblogs.com/swje/ 作者:Zhouwan 2016-1-10 ...
- 代码详解:TensorFlow Core带你探索深度神经网络“黑匣子”
来源商业新知网,原标题:代码详解:TensorFlow Core带你探索深度神经网络“黑匣子” 想学TensorFlow?先从低阶API开始吧~某种程度而言,它能够帮助我们更好地理解Tensorflo ...
- JAVA类与类之间的全部关系简述+代码详解
本文转自: https://blog.csdn.net/wq6ylg08/article/details/81092056类和类之间关系包括了 is a,has a, use a三种关系(1)is a ...
- Java中String的intern方法,javap&cfr.jar反编译,javap反编译后二进制指令代码详解,Java8常量池的位置
一个例子 public class TestString{ public static void main(String[] args){ String a = "a"; Stri ...
- 基础 | batchnorm原理及代码详解
https://blog.csdn.net/qq_25737169/article/details/79048516 https://www.cnblogs.com/bonelee/p/8528722 ...
- 非极大值抑制(NMS,Non-Maximum Suppression)的原理与代码详解
1.NMS的原理 NMS(Non-Maximum Suppression)算法本质是搜索局部极大值,抑制非极大值元素.NMS就是需要根据score矩阵和region的坐标信息,从中找到置信度比较高的b ...
随机推荐
- OpenStack 的 SR-IOV 虚拟机热迁移
目录 文章目录 目录 前言列表 前言 SR-IOV Pass-through 虚拟机热迁移的问题 基于 macvtap 层的 SR-IOV 虚拟机热迁移 Workaround SR-IOV Pass- ...
- nc反弹中 &>、0>&1是什么意思
1.简介 本文结合一些参考文章以及作者个人理解解释Linux的bash反弹命令中的 &>.0>&1 观点有误,欢迎指出! 目标讨论命令:bash -i >& ...
- keycloak~正确让api接口支持跨域
相关参考 https://leejjon.medium.com/how-to-allow-cross-origin-requests-in-a-jax-rs-microservice-d2a6aa2d ...
- ceph客户端配置自动挂载存储服务
1. 安装支持ceph的内核模块 可选: centos/ubuntu: yum install -y ceph-common 或 apt install -y ceph-common 2. 拷贝认证密 ...
- 《iOS面试之道》-勘误2
一.如何保证NSTimer不受Runloop的影响,准时触发 书中提到两种方案, 一种是改变timer加入到runloop中的Mode,为CommonModes不受Runloop的Mode影响 第二种 ...
- Python保姆级教程 数据类型—新手小白入门必看系列
推荐使用压缩软件和杀毒软件 7 - zip 使用火绒 一.基本数据类型与变量(上) 2.1 注释 优点: 代码说明 没注释的代码 有注释的代码 不让解释器执行注释的那句话 2.2 单行注释 单行注释快 ...
- Docker部署深度学习模型
Docker部署深度学习模型 基础概念 Docker Docker是一个打包.分发和运行应用程序的平台,允许将你的应用程序和应用程序所依赖的整个环境打包在一起.比如我有一个目标检测的项目,我想分享给朋 ...
- SELinux(一) 简介
首发公号:Rand_cs 前段时间的工作遇到了一些关于 SELinux 的问题,初次接触不熟悉此概念,导致当时配置策略时束手束脚,焦头烂额,为此去系统的学习了下 SELinux 的东西.聊 SELin ...
- C# .NET 压缩ZIP时 OOM OutOfMemoryException
C# .NET 压缩ZIP时 OOM OutOfMemoryException. ZipArchiveEntry.ZipEntry.SharpZipLib.ZipOutputStream.OutOfM ...
- nginx虚拟主机实战
基于nginx部署网站 虚拟主机指的就是一个独立的站点,具有独立的域名,有完整的www服务,例如网站.FTP.邮件等. Nginx支持多虚拟主机,在一台机器上可以运行完全独立的多个站点. 一.为什么配 ...