[转]广义正交匹配追踪(gOMP)
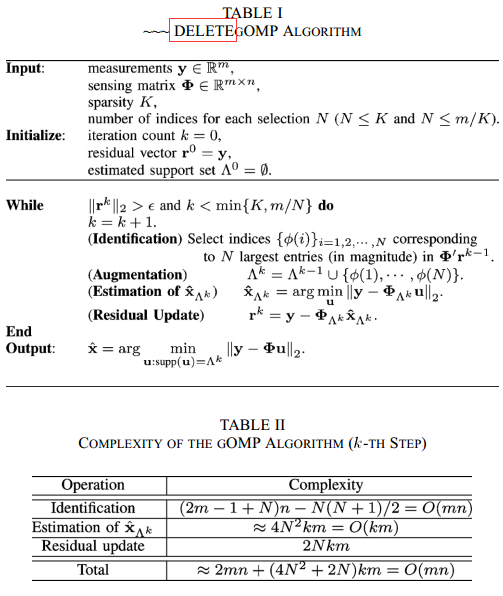
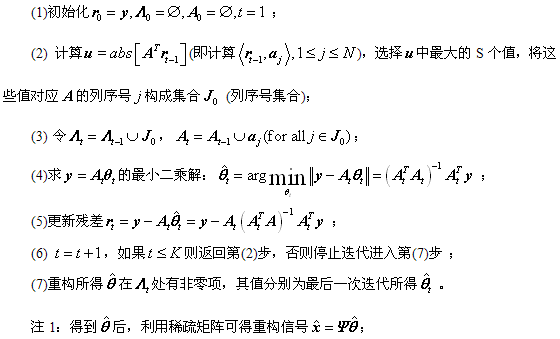
1 gOMP重构算法流程

(1)构造K稀疏信号
% Generate K-sparse vector
%
% N : original signal size.
% K : sparsity level
%
% Output parameters
% x_omp : estimated signal
% iter_count: iteration count during estimating
%
% Written by Suhyuk (Seokbeop) Kwon
% Information System Lab., Korea Univ.
% http://isl.korea.ac.kr
function [x x_pos] = islsp_GenSparseVec(N, K)
KPos = K;
if N/2 < K
KPos = N-K;
end
randPos = ceil(N*rand( KPos, 1 ));
randPos = union(randPos,randPos);
leftPOsLen = KPos-length(randPos);
while leftPOsLen > 0
tmpPos = ceil(N*rand( leftPOsLen, 1 ));
randPos = union(tmpPos,randPos);
leftPOsLen = KPos-length(randPos);
end
if KPos < K
randPos = setxor((1:N), randPos);
end
x = zeros( N, 1 );
x(randPos) = randn( K, 1 );
x_pos = randPos;
end
(2)gOMP函数
% Estimate the sparse signal x using generalized OMP
%
% y : observation
% Phi : sensing matrix
% K : sparsity
% S : selection length
%
% Output parameters
% x_omp : estimated signal
% iter_count: iteration count during estimating
%
% Written by Suhyuk (Seokbeop) Kwon
% Information System Lab., Korea Univ.
% http://isl.korea.ac.kr
function [x_ommp iter_count] = islsp_EstgOMP(y, Phi, K, S, zero_threshold)
% Check the parameters
if nargin < 3
error('islsp_EstgOMP : Input arguments y ,Phi and K must be specified.');
end if nargin < 4
S = max(K/4, 1);
end if nargin < 5
zero_threshold = 1e-6;
end
% Initialize the variables
[nRows nCols] = size(Phi);
x_ommp = zeros(size(Phi,2), 1);
residual_prev = y;
supp = [];
iter_count = 0;
while (norm(residual_prev) > zero_threshold && iter_count < K)
iter_count = iter_count+1;
[supp_mag supp_idx] = sort(abs(Phi'*residual_prev), 'descend');
supp_n = union(supp, supp_idx(1:S));
if (length(supp_n) ~= length(supp)) && (length(supp_n) < nRows )
x_hat = Phi(:,supp_n)\y;
residual_prev = y - Phi(:,supp_n)*x_hat;
supp = supp_n;
else
break;
end
end
x_ommp(supp) = Phi(:,supp)\y; if nargout < 2
clear('iter_count');
end
end
(3)测试主函数
% Measurements size
m = 50;
% Signal size
N = 100;
% Sparsity level
K = 20;
% Generate sensing matrix
Phi = randn(m,N)/sqrt(m);
% Generate sparse vector
[x x_pos] = islsp_GenSparseVec(N, K);
y = Phi*x;
% Using default parameters
[x1 itr1] = islsp_EstgOMP(y, Phi, K);
% Find the sparse vector via selecting 4 indices
[x2 itr2] = islsp_EstgOMP(y, Phi, K, 4);
% Find the sparse vector via selecting 4 indices until the residual becomes 1e-12
[x3 itr3] = islsp_EstgOMP(y, Phi, K, 4, 1e-12);
disp('Mean square error');
[mse(x-x1) mse(x-x2) mse(x-x3)]
disp('Iteration number');
[itr1 itr2 itr3]
[转]广义正交匹配追踪(gOMP)的更多相关文章
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- [转]压缩感知重构算法之分段正交匹配追踪(StOMP)
分段正交匹配追踪(StagewiseOMP)或者翻译为逐步正交匹配追踪,它是OMP另一种改进算法,每次迭代可以选择多个原子.此算法的输入参数中没有信号稀疏度K,因此相比于ROMP及CoSaMP有独到的 ...
- 浅谈压缩感知(二十二):压缩感知重构算法之正则化正交匹配追踪(ROMP)
主要内容: ROMP的算法流程 ROMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.ROMP的算法流程 正则化正交匹配追踪ROMP算法流程与OMP的最大不同之 ...
- 浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)
主要内容: OMP的算法流程 OMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.OMP的算法流程 二.OMP的MATL ...
- 浅谈压缩感知(九):正交匹配追踪算法OMP
主要内容: OMP算法介绍 OMP的MATLAB实现 OMP中的数学知识 一.OMP算法介绍 来源:http://blog.csdn.net/scucj/article/details/7467955 ...
- opencv实现正交匹配追踪算法OMP
//dic: 字典矩阵: //signal :待重构信号(一次只能重构一个信号,即一个向量) //min_residual: 最小残差 //sparsity:稀疏度 //coe:重构系数 //atom ...
- 压缩感知重构算法之压缩采样匹配追踪(CoSaMP)
压缩采样匹配追踪(CompressiveSampling MP)是D. Needell继ROMP之后提出的又一个具有较大影响力的重构算法.CoSaMP也是对OMP的一种改进,每次迭代选择多个原子,除了 ...
随机推荐
- [转] OracleDataReader.Read()是否有值
TongYu2009的原文地址 当你执行一次OracleDataReader.Read()是Bool型),注意是只读取一个!如果你的Select语句执行结果是空,或者所有的结果都已经读取完了则Orac ...
- sublime text 3(Build 3103)最新注冊码
原来注冊过的sublime text 3近期更新了.没想到原来的注冊码就失效了,只是我找到了最新的注冊码(Build 3103),与大家分享一下(第一个亲測可用). -– BEGIN LICENSE ...
- 【stl学习笔记】红黑树
转自维基百科 红黑树是一种平衡二叉搜索树,它可以在O(log n)时间内做查找,插入和删除,这里的n是树中元素的数目. 性质: 红黑树是每个节点都带有颜色属性的二叉查找树,颜色为红色或黑色.在二叉查找 ...
- 【c++】拷贝控制具体分析
我们可以定义拷贝操作,使类的行为看起来像一个值或者像一个指针,这取决于如何拷贝指针成员. 当我们拷贝一个像值的对象时,副本和原对象是完全独立的,改变副本不会对原对象有任何影响,反之亦然.标准库容器和s ...
- 【Mongodb教程 第一课补加课2 】MongoDB下,启动服务时,出现“服务没有响应控制功能”解决方法
如图,如果通过下列代码,添加服务后,使用net start命令出现这样的问题时,可以参考下我的解决方法. D:\MongoDB>mongod --dbpath D:\MongoDB\Data - ...
- Selenium系列之--测试框架断言【转】
selenium提供了三种模式的断言:assert .verify.waitfor 1)Assert(断言) 失败时,该测试将终止. 2)Verify(验证) 失败时,该测试将继续执行,并将错误记入日 ...
- swagger 如何在UI界面加入Authentication token值
接口 2.access_token 值: 3 输入值:bearer+空格+值
- Axure安装fontawesome字体
http://www.fontawesome.com.cn/ 下载后,双击安装字体提示 不是有效的字体,百度 ..解决方法: 任务管理器--服务-- MpsSvc-Windows Firewall ...
- ranlib
1 ranlib的缩写 random access library 2 ranlib的作用 为静态库的符号建立索引,可以加速链接,因此称用ranlib处理过的library为random access ...
- 定时邮件 已经稳定运行10天+ 从局域网linux到外网邮箱