Ubuntu16.04 + ROS下串口通讯
本文参考https://blog.csdn.net/weifengdq/article/details/84374690
由于工程需要,需要Ubuntu16.04 + ROS与STM32通讯,主要有两种方案解决通讯,一种是在STM32上加载ROS库让STM32作为一个节点,发布自己的主题消息,在ROS上订阅STM32上发布的主题就可以接受消息,STM32订阅ROS上的主题即可接收消息。另一种方法是在ROS串口输出数据,STM32通过普通串口形式接收字符串。下面是我通过Ubuntu16.04 + ROS通过串口助手测试ROS上收数据。
1、建立新的工作空间
mkdir -p ~/catkin_ws/src
2、打开catkin_ws/src
cd ~/catkin_ws/src
3、在src内创建一个C++工程
catkin_create_pkg serial_communication roscpp std_msgscd serial_communication/src
touch serial_communication.cpp
gedit serial_communication.cpp
4、编辑serial_communication.cpp 内容如下:
#include <string>
#include <ros/ros.h> // 包含ROS的头文件
#include <boost/asio.hpp> //包含boost库函数
#include <boost/bind.hpp>
#include "std_msgs/String.h" //ros定义的String数据类型 using namespace std;
using namespace boost::asio; //定义一个命名空间,用于后面的读写操作 unsigned char buf[12]; //定义字符串长度 int main(int argc, char **argv)
{ ros::init(argc, argv, "serial_communication"); //初始化节点
ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); //定义发布消息的名称及sulv ros::Rate loop_rate(10); io_service iosev;
serial_port sp(iosev, "/dev/ttyACM0"); //定义传输的串口
sp.set_option(serial_port::baud_rate(115200));
sp.set_option(serial_port::flow_control());
sp.set_option(serial_port::parity());
sp.set_option(serial_port::stop_bits());
sp.set_option(serial_port::character_size(8)); while (ros::ok())
{
//write(sp, buffer(buf1, 6)); //write the speed for cmd_val
//write(sp, buffer("Hellq world", 12));
read(sp, buffer(buf));
string str(&buf[0], &buf[11]); //将数组转化为字符串
//if (buf[10] == '\n')
{
std_msgs::String msg;
std::stringstream ss;
ss << str; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); //打印接受到的字符串
chatter_pub.publish(msg); //发布消息 ros::spinOnce(); loop_rate.sleep();
}
} iosev.run();
return 0;
}
5、保存后, 打开 ~/catkin_ws/src/serial_communication/CMakeLists.txt, 最后面加上:
add_executable(serial_communication src/serial_communication.cpp)
target_link_libraries(serial_communication ${catkin_LIBRARIES})
6、编译工作空间
cd ~/catkin_ws
catkin_make
7、开启一个新的终端 输入:
roscore
8、新开启另一个终端 输入:查看端口号
ls -l /dev |grep ttyUSB
9输入: 启动串口看是否有报错
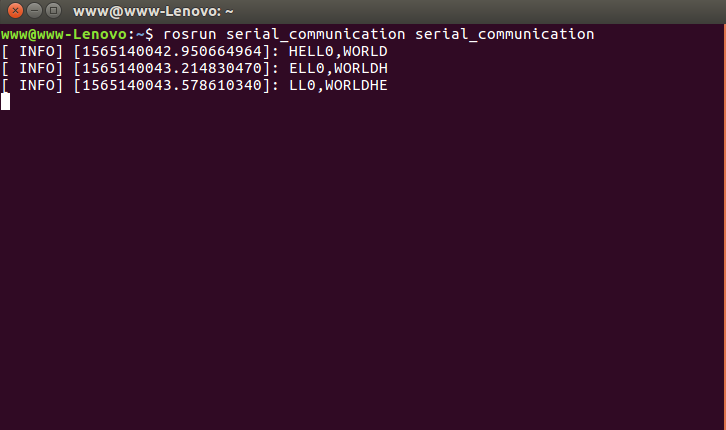
rosrun serial_communication serial_communication
如出现下图,是因为端口号没有获取读写权限

10、输入: 获取权限
sudo chmod 777 /dev/ttyUSB0
11、最后结果: 使用串口发送的HELLO WORLD
Ubuntu16.04 + ROS下串口通讯的更多相关文章
- ubuntu16.04 ROS环境下配置和运行SVO
ubuntu16.04 ROS环境下配置和运行SVO https://blog.csdn.net/nnUyi/article/details/78005552
- Ubuntu16.04 LTS下apt安装WireShark
Ubuntu16.04 LTS下apt安装WireShark 安装与配置 首先通过apt安装WireShark: $ sudo apt install wireshark 会同时安装许多的依赖包,其中 ...
- 保姆级教程——Ubuntu16.04 Server下深度学习环境搭建:安装CUDA8.0,cuDNN6.0,Bazel0.5.4,源码编译安装TensorFlow1.4.0(GPU版)
写在前面 本文叙述了在Ubuntu16.04 Server下安装CUDA8.0,cuDNN6.0以及源码编译安装TensorFlow1.4.0(GPU版)的亲身经历,包括遇到的问题及解决办法,也有一些 ...
- Ubuntu16.04环境下的硬盘挂载
需求:在Ubuntu16.04系统下,挂载一个新的硬盘 第一步:查看目前已经存在的分区的状态 命令:df -l 如上图所示,并未看到要挂载的硬盘(sda)的状态. 第二步:查看计算机硬盘的状态(包括格 ...
- Ubuntu16.04系统下 解决“无法获得锁 /var/lib/dpkg/lock -open (11:资源暂时不可用)、无法锁定管理目录(/var/lib/dpkg/),是否有其他进程正占用它?”的方法
在Ubuntu16.04下安装软件,例如:sudo apt-get install lrzsz时提示: 无法获得锁 /var/lib/dpkg/lock - open (11: 资源暂时不可用) 无法 ...
- Ubuntu16.04环境下搭建基于三台主机的mysql galera cluster集群(实测有效)
(注意: (1)文中红色字体部分不一定需要操作 (2)由于word文档编辑的原因,实际操作时部分命令需要手动输入!!直接复制粘贴会提示错误!! ) 一 搭建环境: 1 Ubuntu16.04版本(系 ...
- java web下串口通讯
最近在做java串口通讯,主要是用个人电脑通过串口从RS485读取数据,并通过crc循环冗余校验,把接收正确的数据解析,插入数据库mysql,并用SSH技术把数据库数据以表格以及图表形式显示 ...
- faster-rcnn在ubuntu16.04环境下的超级详细的配置(转)
首先,下载好必须要的安装包.为了方便,我已经全部上传在了百度云. - ubuntu16.04系统 链接:http://pan.baidu.com/s/1geU8piz 密码:25mk - cuda8. ...
- ubuntu16.04环境下在docker上部署javaweb项目简单案例
因为一些原因,接触到了docker,经过一番研究,总算是有了一些自己的看法,有什么不对的地方,希望多多指教. 废话不多说,首先我这里使用的虚拟机安装的是ubuntu16.04版本,其他版本应该也可以. ...
随机推荐
- gerrit 版本下载
链接:https://gerrit-releases.storage.googleapis.com 如下载gerrit-2.12.2.war https://gerrit-releases.stora ...
- R 读取excel的方法
1.加载 readxl 包,利用 reade_excel() 函数 install.packages("readxl") library(readxl) data = read_e ...
- JQuery 多属性选择节点
JQuery 1.6.0+以后用prop()代替attr(); 多属性选择节点 $("input[type=checkbox][name='first2'][value='first4']& ...
- 编译Linux
下载内核源文件 https://git.kernel.org/pub/scm/linux/kernel/git/stable/linux-stable.git/ 生成.config配置文件 make ...
- 51nod 1006:最长公共子序列Lcs
1006 最长公共子序列Lcs 基准时间限制:1 秒 空间限制:131072 KB 分值: 0 难度:基础题 收藏 关注 给出两个字符串A B,求A与B的最长公共子序列(子序列不要求是连续的). ...
- filebeat+redis+logstash+elasticsearch基本配置--适用于6.4版本
filebeat配置: filebeat.inputs:- type: log enabled: true paths: - /opt/xxxx.log fields: ...
- oracle数据删除恢复
insert into 表名 select * from 表名 as of timestamp to_Date('2017-07-20 10:00:00', 'yyyy-mm-dd hh24:mi:s ...
- 【TensorFlow】tf.reset_default_graph()函数
转载 https://blog.csdn.net/duanlianvip/article/details/98626111 tf.reset_default_graph函数用于清除默认图形堆栈并重置 ...
- SASS - 函数
SASS – 简介 SASS – 环境搭建 SASS – 使用Sass程序 SASS – 语法 SASS – 变量 SASS- 局部文件(Partial) SASS – 混合(Mixin) SASS ...
- adfs环境安装
安装文档参考: https://docs.microsoft.com/zh-cn/windows-server/identity/ad-fs/deployment/set-up-the-lab-env ...