Matlab Script to pre-process UAV123 tracking dataset
Matlab Script to pre-process UAV123 tracking dataset
2019-11-08 09:43:11
Official project page: https://ivul.kaust.edu.sa/Pages/Dataset-UAV123.aspx
A Benchmark and Simulator for UAV Tracking
Details
Publications
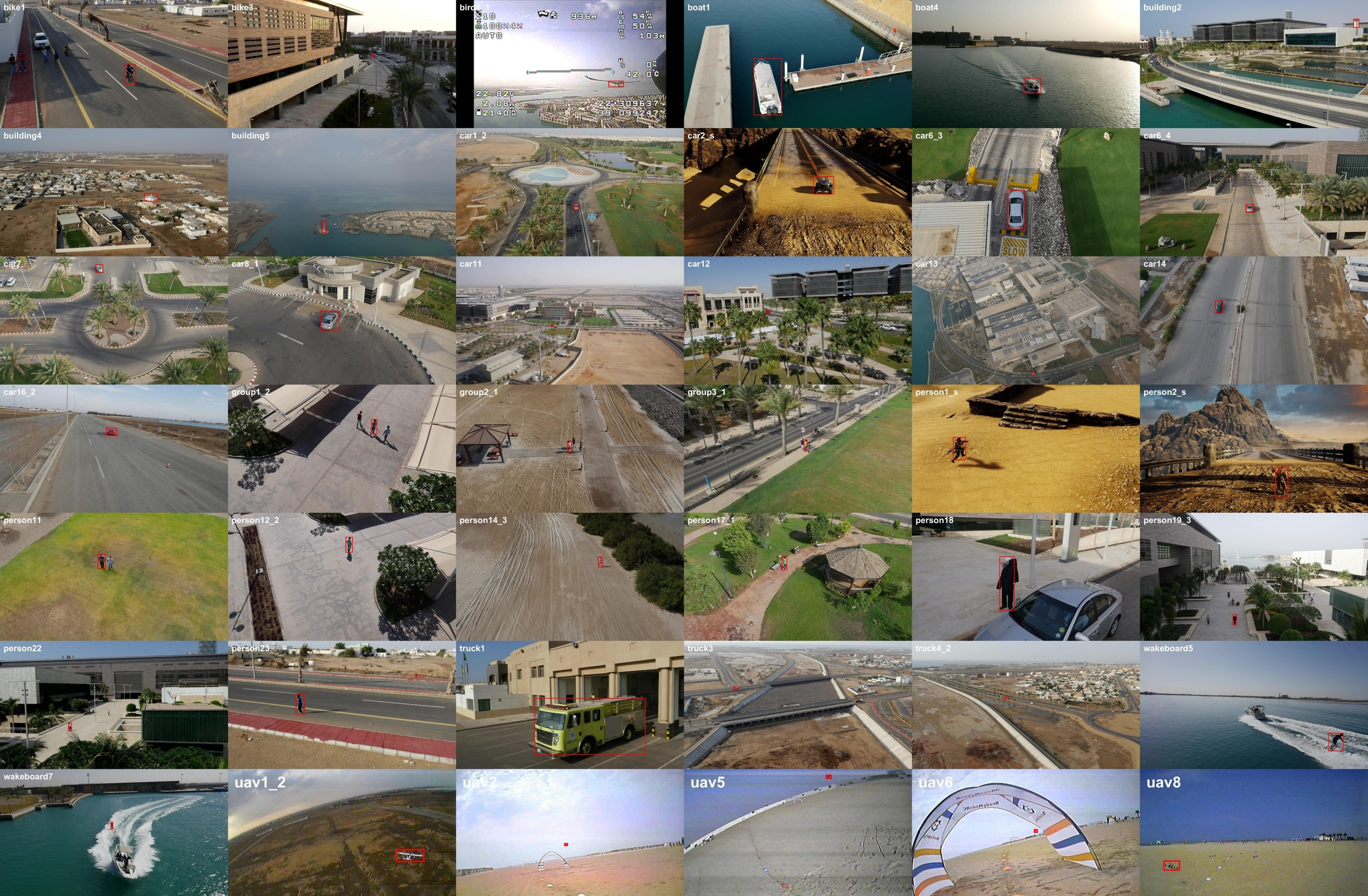
UAV-123 跟踪数据集并未提供处理好的数据集,官网下载的数据集是包含 91 个视频,需要处理下,将其分割为 123 个视频,这样操作比较方便。下面是 matlab 的处理脚本,需要的视频起始帧等信息,可以从其提供的评测代码上获取。这里将其列出:
'name','bike1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\bike1','startFrame',1,'endFrame',3085,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','bike2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\bike2','startFrame',1,'endFrame',553,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','bike3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\bike3','startFrame',1,'endFrame',433,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','bird1_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\bird1','startFrame',1,'endFrame',253,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','bird1_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\bird1','startFrame',775,'endFrame',1477,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','bird1_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\bird1','startFrame',1573,'endFrame',2437,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat1','startFrame',1,'endFrame',901,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat2','startFrame',1,'endFrame',799,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat3','startFrame',1,'endFrame',901,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat4','startFrame',1,'endFrame',553,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat5','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat5','startFrame',1,'endFrame',505,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat6','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat6','startFrame',1,'endFrame',805,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat7','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat7','startFrame',1,'endFrame',535,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat8','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat8','startFrame',1,'endFrame',685,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','boat9','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\boat9','startFrame',1,'endFrame',1399,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','building1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\building1','startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','building2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\building2','startFrame',1,'endFrame',577,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','building3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\building3','startFrame',1,'endFrame',829,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','building4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\building4','startFrame',1,'endFrame',787,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','building5','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\building5','startFrame',1,'endFrame',481,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car1_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car1','startFrame',1,'endFrame',751,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car1_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car1','startFrame',751,'endFrame',1627,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car1_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car1','startFrame',1627,'endFrame',2629,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car2','startFrame',1,'endFrame',1321,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car3','startFrame',1,'endFrame',1717,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car4','startFrame',1,'endFrame',1345,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car5','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car5','startFrame',1,'endFrame',745,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car6_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car6','startFrame',1,'endFrame',487,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car6_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car6','startFrame',487,'endFrame',1807,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car6_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car6','startFrame',1807,'endFrame',2953,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car6_4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car6','startFrame',2953,'endFrame',3925,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car6_5','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car6','startFrame',3925,'endFrame',4861,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car7','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car7','startFrame',1,'endFrame',1033,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car8_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car8','startFrame',1,'endFrame',1357,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car8_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car8','startFrame',1357,'endFrame',2575,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car9','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car9','startFrame',1,'endFrame',1879,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car10','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car10','startFrame',1,'endFrame',1405,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car11','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car11','startFrame',1,'endFrame',337,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car12','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car12','startFrame',1,'endFrame',499,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car13','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car13','startFrame',1,'endFrame',415,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car14','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car14','startFrame',1,'endFrame',1327,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car15','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car15','startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car16_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car16','startFrame',1,'endFrame',415,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car16_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car16','startFrame',415,'endFrame',1993,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car17','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car17','startFrame',1,'endFrame',1057,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car18','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car18','startFrame',1,'endFrame',1207,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group1_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group1','startFrame',1,'endFrame',1333,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group1_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group1','startFrame',1333,'endFrame',2515,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group1_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group1','startFrame',2515,'endFrame',3925,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group1_4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group1','startFrame',3925,'endFrame',4873,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group2_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group2','startFrame',1,'endFrame',907,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group2_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group2','startFrame',907,'endFrame',1771,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group2_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group2','startFrame',1771,'endFrame',2683,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group3_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group3','startFrame',1,'endFrame',1567,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group3_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group3','startFrame',1567,'endFrame',2827,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group3_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group3','startFrame',2827,'endFrame',4369,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','group3_4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\group3','startFrame',4369,'endFrame',5527,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person1','startFrame',1,'endFrame',799,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person2_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person2','startFrame',1,'endFrame',1189,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person2_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person2','startFrame',1189,'endFrame',2623,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person3','startFrame',1,'endFrame',643,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person4_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person4','startFrame',1,'endFrame',1501,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person4_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person4','startFrame',1501,'endFrame',2743,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person5_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person5','startFrame',1,'endFrame',877,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person5_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person5','startFrame',877,'endFrame',2101,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person6','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person6','startFrame',1,'endFrame',901,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person7_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person7','startFrame',1,'endFrame',1249,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person7_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person7','startFrame',1249,'endFrame',2065,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person8_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person8','startFrame',1,'endFrame',1075,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person8_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person8','startFrame',1075,'endFrame',1525,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person9','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person9','startFrame',1,'endFrame',661,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person10','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person10','startFrame',1,'endFrame',1021,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person11','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person11','startFrame',1,'endFrame',721,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person12_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person12','startFrame',1,'endFrame',601,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person12_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person12','startFrame',601,'endFrame',1621,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person13','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person13','startFrame',1,'endFrame',883,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person14_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person14','startFrame',1,'endFrame',847,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person14_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person14','startFrame',847,'endFrame',1813,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person14_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person14','startFrame',1813,'endFrame',2923,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person15','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person15','startFrame',1,'endFrame',1339,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person16','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person16','startFrame',1,'endFrame',1147,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person17_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person17','startFrame',1,'endFrame',1501,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person17_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person17','startFrame',1501,'endFrame',2347,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person18','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person18','startFrame',1,'endFrame',1393,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person19_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person19','startFrame',1,'endFrame',1243,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person19_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person19','startFrame',1243,'endFrame',2791,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person19_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person19','startFrame',2791,'endFrame',4357,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person20','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person20','startFrame',1,'endFrame',1783,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person21','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person21','startFrame',1,'endFrame',487,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person22','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person22','startFrame',1,'endFrame',199,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person23','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person23','startFrame',1,'endFrame',397,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','truck1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\truck1','startFrame',1,'endFrame',463,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','truck2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\truck2','startFrame',1,'endFrame',385,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','truck3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\truck3','startFrame',1,'endFrame',535,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','truck4_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\truck4','startFrame',1,'endFrame',577,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','truck4_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\truck4','startFrame',577,'endFrame',1261,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav1_1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav1','startFrame',1,'endFrame',1555,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav1_2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav1','startFrame',1555,'endFrame',2377,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav1_3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav1','startFrame',2473,'endFrame',3469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav2','startFrame',1,'endFrame',133,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav3','startFrame',1,'endFrame',265,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav4','startFrame',1,'endFrame',157,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav5','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav5','startFrame',1,'endFrame',139,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav6','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav6','startFrame',1,'endFrame',109,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav7','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav7','startFrame',1,'endFrame',373,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','uav8','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\uav8','startFrame',1,'endFrame',301,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard1','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard1','startFrame',1,'endFrame',421,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard2','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard2','startFrame',1,'endFrame',733,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard3','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard3','startFrame',1,'endFrame',823,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard4','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard4','startFrame',1,'endFrame',697,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard5','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard5','startFrame',1,'endFrame',1675,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard6','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard6','startFrame',1,'endFrame',1165,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard7','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard7','startFrame',1,'endFrame',199,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard8','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard8','startFrame',1,'endFrame',1543,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard9','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard9','startFrame',1,'endFrame',355,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','wakeboard10','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\wakeboard10','startFrame',1,'endFrame',469,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car1_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car1_s','startFrame',1,'endFrame',1475,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car2_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car2_s','startFrame',1,'endFrame',320,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car3_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car3_s','startFrame',1,'endFrame',1300,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','car4_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\car4_s','startFrame',1,'endFrame',830,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person1_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person1_s','startFrame',1,'endFrame',1600,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person2_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person2_s','startFrame',1,'endFrame',250,'nz',6,'ext','jpg','init_rect', [0,0,0,0]),...
'name','person3_s','path','G:\Tracking_Benchmark\UAV123_Dataset\UAV123\data_seq\UAV123\person3_s','startFrame',1,'endFrame',505,'nz',6,'ext','jpg','init_rect', [0,0,0,0])};
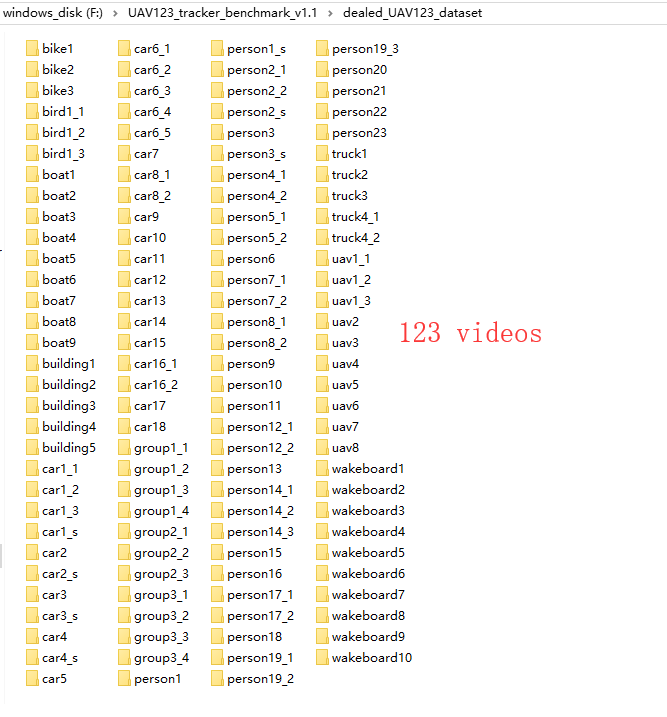
将上述文档复制到 txt 文档中,并重命名为:uav123_videoList.txt,然后执行下面的脚本即可生成对应的 UAV123 数据集视频和对应的标注文件。格式服从 OTB-2015。
%%
clc; clear all; close all; warning off; uav123_videoList_path = 'F:\UAV123_tracker_benchmark_v1.1\uav123_videoList.txt';
videoInfo_txt = importdata(uav123_videoList_path);
uav123_savePath = 'F:\UAV123_tracker_benchmark_v1.1\UAV123_dataset\';
mkdir(uav123_savePath); uav123_gt_path = 'G:\Tracking_Benchmark\UAV123_Dataset\UAV123\UAV123_gt_files\'; for i=1:size(videoInfo_txt, 1) line = videoInfo_txt(i, :);
line_txt = line{1, 1};
parse_txt = regexp(line_txt, ',', 'split'); videoName = parse_txt{1, 2};
videoName = videoName(2:end-1);
videoPath = parse_txt{1, 4};
videoPath = [videoPath '\'];
videoPath = videoPath(2:end-1);
startFrame = str2double(parse_txt{1, 6});
endFrame = str2double(parse_txt{1, 8}); gt_path = [uav123_gt_path videoName '.txt'];
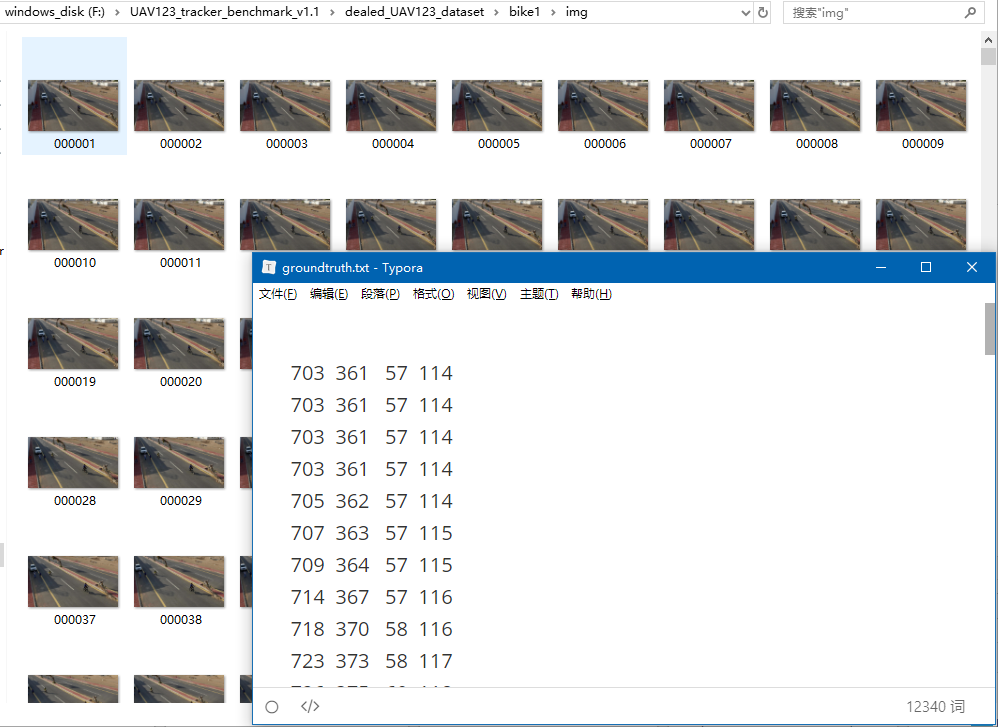
gt = importdata(gt_path); newVideo_path = [uav123_savePath videoName '\img\'];
newGT_path = [uav123_savePath videoName '\groundtruth.txt'];
mkdir(newVideo_path);
imgFiles = dir([videoPath, '*.jpg']);
count = 1;
fid = fopen(newGT_path, 'w');
fprintf(fid, '%s\n', num2str(gt(1, :)));
fclose(fid); for imgIndex = startFrame:endFrame
disp(['==>> ', num2str(i), '/', num2str(size(videoInfo_txt, 1)), 'index: ', num2str(count)]);
image = imread([videoPath, imgFiles(imgIndex).name]);
imgName = [sprintf('%06d', count) '.jpg'];
imwrite(image, [newVideo_path, imgName]);
count = count + 1;
end end
====>> Tracking results visualization:
% 把所有tracker的结果画在一张图上,结果保存在 tracking_Results_Visualize_lasot 目录下:
clc; close all; clear all; tracker={'VITAL', 'MDNet', 'SINT', 'CFNet', 'ECO', 'PTAV', 'GroundTruth'};
lasot_dataset_path = 'E:\LaSOT-dataset\LaSOT\';
sequence= dir(lasot_dataset_path);
sequence = sequence(:end); trackerResultsPath='C:\Users\wangx\Desktop\LaSOT_Evaluation_Toolkit\tracking_results\';
sequencePath=lasot_dataset_path;
saveBasePath='E:\LaSOT-dataset\tracking_Results_Visualize_lasot\';
if(isfolder(saveBasePath)==)
mkdir(saveBasePath);
end % for videoIndex = :size(sequence, )
for videoIndex = %% , savingPath=[saveBasePath sequence(videoIndex).name '\'];
if(isfolder(savingPath)==)
mkdir(savingPath);
end
savingPath;
% r 红 g 绿 b 蓝 c 蓝绿 m 紫红 y 黄 k 黑 w 白
edgeColor={'r','g','b', 'y','k','m', 'c','g','b'};
lineStyle={'-','-','-', '-','-','-', '-','--',':',};
for trackerIndex=:length(tracker)
trackerResult(:,:,trackerIndex)=dlmread([trackerResultsPath [tracker{, trackerIndex} '_tracking_result'] '\' sequence(videoIndex).name '.txt']);
end frames=dir([sequencePath sequence(videoIndex).name '\img\*.png']);
if(isempty(frames)==)
frames=dir([sequencePath sequence(videoIndex).name '\img\*.jpg']);
end frames={frames.name};
bb=[trackerResult(:,,:), trackerResult(:,,:) , trackerResult(:,,:), trackerResult(:,,:)] ; for frameIndex=:length(frames)
im = imread([sequencePath sequence(videoIndex).name '\img\' frames{frameIndex}]);
imshow(uint8(im));
for trackerIndex=:length(tracker)
rectangle('Position',bb(frameIndex,:,trackerIndex),'LineWidth',,'EdgeColor',edgeColor{trackerIndex},'LineStyle',lineStyle{trackerIndex});
end
hold on;
text(, , strcat('#',num2str(frameIndex)), 'Color','y', 'FontWeight','bold', 'FontSize',);
set(gca,'position',[ ]);
pause(0.00001);
hold off;
imwrite(frame2im(getframe(gcf)),[savingPath num2str(frameIndex) '.jpg']);
end end
Matlab Script to pre-process UAV123 tracking dataset的更多相关文章
- save tracking results into csv file for oxuva long-term tracking dataset (from txt to csv)
save tracking results into csv file for oxuva long-term tracking dataset (from txt to csv) 2019-10-2 ...
- MATLAB 例子研究 Motion-Based Multiple Object Tracking
这个例子是用来识别视频中多个物体运动的.我要研究的是:搞清楚识别的步骤和相应的算法,识别出物体运动的轨迹. 详细参见官方帮助文档,总结如下: 移动物体的识别算法:a background subtra ...
- labview 调用 matlab script的神坑! Error 1050 occurred at LabVIEW
显示变量没有被定义,原因是clear 关键字的问题,去掉即可!!! 未找到 文件路径,定位: 文件路径中不能有中文路径
- (zhuan) Speech and Natural Language Processing
Speech and Natural Language Processing obtain from this link: https://github.com/edobashira/speech-l ...
- Libsvm:脚本(subset.py、grid.py、checkdata.py) | MATLAB/OCTAVE interface | Python interface
1.脚本 This directory includes some useful codes: 1. subset selection tools. (子集抽取工具) subset.py 2. par ...
- matlab安装和入门
下载iso镜像: ISO镜像下载地址链接: http://pan.baidu.com/s/1i31bu5J 密码: obo1 单独破解文件下载链接: http://pan.baidu.com/s/1c ...
- 相机标定问题-Matlab & Py-Opencv
一.相机标定基本理论 1.相机成像系统介绍 图中总共有4个坐标系: 图像坐标系:Op 坐标表示方法(u,v) Unit:Dots(个) 成像坐标系:Oi ...
- 读取Simulink中Dataset类型的数据
http://files.cnblogs.com/files/pursuiting/%E5%80%92%E7%AB%8B%E6%91%86%E6%8E%A7%E5%88%B6%E7%B3%BB%E7% ...
- Matlab编程基础
平台:Win7 64 bit,Matlab R2014a(8.3) “Matlab”是“Matrix Laboratory” 的缩写,中文“矩阵实验室”,是强大的数学工具.本文侧重于Matlab的编程 ...
随机推荐
- 5 dex文件
Dex文件中数据结构 类型 含义 u1 等同于uint8_t,表示1字节无符号数 u2 等同于uint16_t,表示2字节的无符号数 u4 等同于uint32_t,表示4字节的无符号数 u8 等同于u ...
- ThinkPHP5中如何实现模板完全静态化
模板完全静态化,也就是通过模板完全生成纯静态的网页,相比动态页面和伪静态页面更安全更利于SEO访问更快.相比前二者各有利弊吧,现在稍微对这三种形式的优缺点对比一下,以及在ThinkPHP5项目中实现完 ...
- tp5 宝塔open_basedir restriction in effect 错误; IIS open_basedir restriction in effect
很久前做过的一个微信项目,客户突然找到我说换了部署环境后网站报错,再跟客户确定了php版本,伪静态设置后,网站依旧打不开,官网手册这样解释: 然而因为客户是iis8的表示该文档一点鸡毛用都米有哇,求助 ...
- Anaconda安装、更新第三方包
conda和pip简介 conda conda是包及其依赖项和环境的管理工具. 适用语言:Python, R, Ruby, Lua, Scala, Java, JavaScript, C/C++, F ...
- 2019年牛客多校第二场 F题Partition problem 爆搜
题目链接 传送门 题意 总共有\(2n\)个人,任意两个人之间会有一个竞争值\(w_{ij}\),现在要你将其平分成两堆,使得\(\sum\limits_{i=1,i\in\mathbb{A}}^{n ...
- Selenium_webdriver+java通过读取firefox、chrome的cookie文件,实现自动登录
遇到过很多问题,通过查资料得出的最终结果!
- httprunner学习18-多进程运行模式
前言 使用Locust进行性能测试时,当一台单机不足以模拟所需的用户数量的时候,可以使用主从模式,启动一个master节点,多个slave节点. 主从模式 loucsts 是httprunner 里面 ...
- Makefile 与tab
Makefile文件由一系列规则(rules)构成.每条规则的形式如下. <target> : <prerequisites> [tab] <commands> 上 ...
- Codeforces Round #552 (Div. 3)-C-Gourmet Cat
http://codeforces.com/contest/1154/problem/C 题意: 有一只猫,周一周四周日吃鱼肉,周二周六吃兔肉,周三周五吃鸡肉,现给出三种肉的数量,问最多能吃多少天? ...
- materialize 读取单选按钮
$('input[name='xxx']:checked')