cv2.solvepnp 相机的位姿估计

cv2.solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs[, rvec[, tvec[, useExtrinsicGuess[, flags]]]]) → retval, rvec, tvec
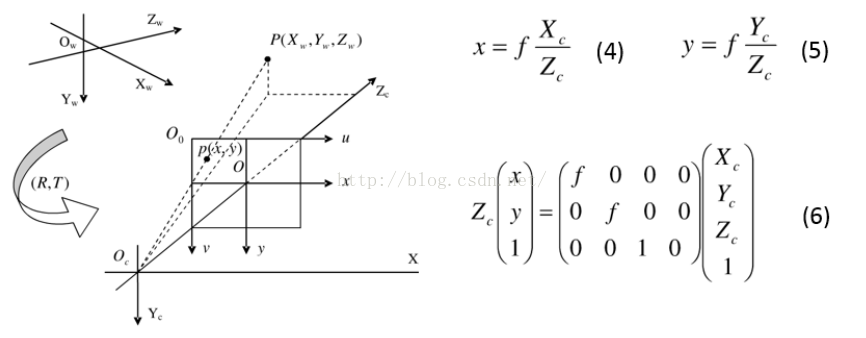
- objectPoints:世界坐标系中的3D点坐标,单位mm
- imagePoints:图像坐标系中点的坐标,单位像素
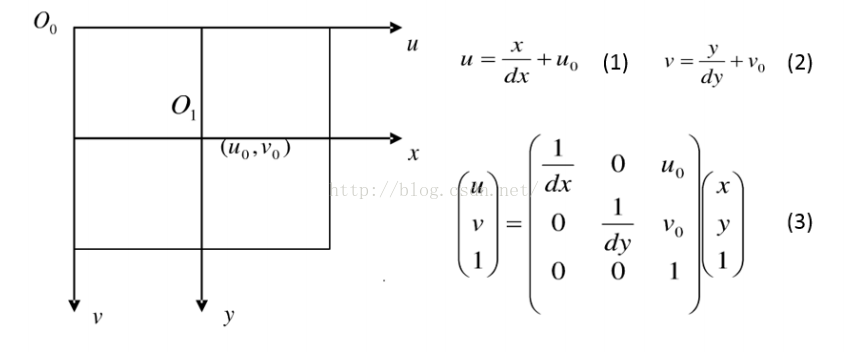
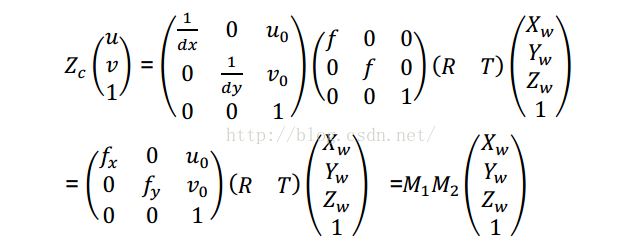
- cameraMatrix:相机内参矩阵
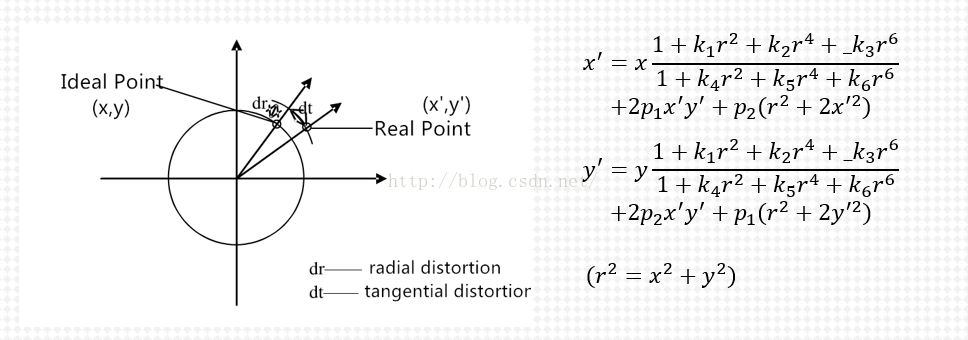
- distCoeffs:畸变系数
- rvec:旋转矩阵
- tvec:平移矩阵
- useExtrinsicGuess:是否输出平移矩阵和旋转矩阵,默认为false
- flags:SOLVEPNP _ITERATIVE、SOLVEPNP _P3P、SOLVEPNP _EPNP、SOLVEPNP _DLS、SOLVEPNP _UPNP
improt cv2 as cv import numpy as np objPoints = np.array([[],[],[]]) imgPoints = np.array([]) cameraMatrix = np.array() distCoeffs = np.array() retval,rvec,tvec = cv.solvePnP(objPoints,imgPoints,cameraMatrix,distCoeffs)
cv2.solvepnp 相机的位姿估计的更多相关文章
- python+opencv2相机位姿估计
最近在做基于图像的室内定位方面的研究,于是使用到了百度最新的室内数据库Image-based Localization (IBL) .由于该数据库给出的数据是每幅图像和其对应相机的内外参数和光心投影方 ...
- 相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试
关键词:OpenCV::solvePnP 文章类型:方法封装.测试 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-27 @Lab: CvLab20 ...
- 相机位姿估计0:基本原理之如何解PNP问题
关键词:相机位姿估计 PNP问题求解 用途:各种位姿估计 文章类型:原理 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-18 @Lab: CvLa ...
- 物体的三维识别与6D位姿估计:PPF系列论文介绍(三)
作者:仲夏夜之星 Date:2020-04-08 来源:物体的三维识别与6D位姿估计:PPF系列论文介绍(三) 文章“A Method for 6D Pose Estimation of Free-F ...
- 【转】【计算机视觉】opencv靶标相机姿态解算2 根据四个特征点估计相机姿态 及 实时位姿估计与三维重建相机姿态
https://blog.csdn.net/kyjl888/article/details/71305149
- 机器学习进阶-光流估计 1.cv2.goodFeaturesToTrack(找出光流估计所需要的角点) 2.cv2.calcOpticalFlowPyrLK(获得光流检测后的角点位置) 3.cv2.add(进行像素点的加和)
1.cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params) 用于获得光流估计所需要的角点参数说明:old_gray表示输入图片, ...
- 阅读高翔的RGBD-SLAM博文笔记
目录 高翔的RGBD-SLAM笔记 前端VO: 后端优化 高翔的RGBD-SLAM笔记 RGBD相机的特点: 使用RGBD相机中的深度这一维信息,以及相机的针孔成像模型,相机的内参,可以将二维点恢复成 ...
- ORB-SLAM2初步(跟踪模块)
一.跟踪模块简介 在ORB-SLAM或其他SLAM系统中,跟踪的主要任务是根据相机或视频输入的图像帧实时输出相机位姿.在ORB-SLAM中,跟踪模块的主要任务是实时输出相机位姿和筛选关键帧,完成一个没 ...
- CCF虚拟现实与可视化技术专委会丨面向增强现实的可视计算技术研究进展概述
https://mp.weixin.qq.com/s/I-rNwgXHEtwgdpkWzKtVXw 摘要 新一代增强现实技术需要依赖可视计算理论与方法解决大尺度复杂环境下的场景建模.内容生成.感知交互 ...
随机推荐
- 牛客月赛 G-many sum(筛因子)
many sum 链接:https://ac.nowcoder.com/acm/contest/879/G来源:牛客网 时间限制:C/C++ 1秒,其他语言2秒 空间限制:C/C++ 524288K, ...
- Python 绘制你想要的数学函数图形
Python 非常热门,但除非工作需要没有刻意去了解更多,直到有个函数图要绘制,想起了它.结果发现,完全用不着明白什么是编程,就可以使用它完成很多数学函数图的绘制. 通过以下两个步骤,就可以进行数学函 ...
- this解惑
前言 要正确理解this,首先得理解执行上下文,这里推荐汤姆大叔的执行上下文,因为this是在运行代码时确认具体指向谁,箭头函数除外. 全局作用域中的this node: 每个javaScript文件 ...
- IT兄弟连 Java语法教程 运行Java程序
编译好Java字节码文件后,接下来就应该运行Java程序了. 运行Java程序需要使用JDK中提供的java命令,因为已经把java命令所在的路径添加到了系统的Path环境变量中,因此现在可以直接使用 ...
- appium自动化测试框架——在python脚本中执行dos命令
一般我们运行dos命令,会有两种需求,一种是需要收集执行结果,如ip.device等:一种是不需要收集结果,如杀死或开启某个服务. 对应的在python中就要封装两种方法,来分别实现这两种需求. 1. ...
- JavaScript进阶 - 第6章 事件响应,让网页交互
6-1什么是事件 JavaScript 创建动态页面.事件是可以被 JavaScript 侦测到的行为. 网页中的每个元素都可以产生某些可以触发 JavaScript 函数或程序的事件. 比如说,当用 ...
- IntelliJ IDEA 打包Maven 构建的 Java 项目
方法 2,一键生成方便到哭 打开maven项目路径 一键生成 3.生成jar 目标文件在 path/target/xx.jar下面 方法 1 选中Java项目工程名称,在菜单中选择 F ...
- (转)linux实战考试题:批量创建用户和密码-看看你会么?
老男孩教育第五关实战考试题:批量创建10个用户stu01-stu10,并且设置随机8位密码,要求不能用shell的循环(例如:for,while等),只能用linux命令及管道实现. 方法1:[roo ...
- (转) RHEL7 忘记密码修改root密码
博客链接:http://blog.csdn.net/derkampf/article/details/54346516 RHEL7进入单用户方式和重置密码方式发生了较大变化,GRUB由b引导变成了ct ...
- Spark Mllib里决策树回归分析如何对numClasses无控制和将部分参数设置为variance(图文详解)
不多说,直接上干货! 在决策树二元或决策树多元分类参数设置中: 使用DecisionTree.trainClassifier 见 Spark Mllib里如何对决策树二元分类和决策树多元分类的分类 ...