[AI开发]目标跟踪之速度计算
基于视频结构化的应用中,目标在经过跟踪算法后,会得到一个唯一标识和它对应的运动轨迹,利用这两个数据我们可以做一些后续工作:测速(交通类应用场景)、计数(交通类应用场景、安防类应用场景)以及行为检测(交通类应用场景、安防类应用场景)。我会写三篇文章依次介绍这三个主题。
(1)目标跟踪之速度计算
(2)目标跟踪之计数
(3)目标跟踪之行为检测
后面会陆续添加链接。
本篇文章以交通类应用场景为例,介绍车辆速度计算方法。
速度计算前提
速度=距离÷时间
视频是一个连续的图片序列,我们只要分别知道目标在第N帧和第M帧中的位置(像素坐标),然后这两帧之间的时间间隔,就可以得到目标在视频图像中的“像素速度”(像素/秒),计算方式很简单:
像素速度=像素距离÷时间
其中像素距离可以通过目标在两帧中对应的像素坐标计算得到(X1-X2)+(Y1-Y2),又由于视频帧率比较固定,一般视频FPS为25,那么每帧时间为40ms,(M-N)*40即为目标从N帧中位置移动到M帧中位置耗费的时间。如果我们又知道视频画面中每像素代表的实际物理距离(米),那么最终的目标运动速度就非常好计算了。
但是,由于摄像机在拍摄三维空间画面成像时,会存在透视。假设目标在三维空间的路面直线运动,由远到近(反之亦然),即使目标的实际运动速度固定不变,我们在视频画面观察到的像素速度却是在不断变化的,而且这个变化并不呈线性关系。换句话说,视频画面中每像素代表的实际距离并不固定:
实际物理速度!=像素速度*某值
这个问题就非常麻烦了,由于视频画面中的像素距离和实际物理距离不存在线性对应关系,我们不能简单通过目标的像素坐标和时间间隔来计算目标的实际运动速度。
两种解决方案:
1)虽然像素距离和实际物理距离不存在简单的线性对应关系,但是我们可以加入其他条件值,找出像素距离和实际物理距离的映射关系,比如目标由远及近,当视频画面累计运动5像素时,实际累计运动距离为5米,当视频画面累计运动10像素时,实际累计运动距离为8米,以此类推。找到这种映射关系的前提是需要加入其他条件值,比如摄像机与地面的垂直高度等,见后面“视频测速通常做法”。
2)通过变换,将视频画面转换成“俯视视角”(站在道路上方俯视道路)。经过这种变换之后,路面所有的运动目标都可以看作是2D平面运动,变换之后的每像素所代表的实际物理距离固定不变(米/像素)。这样一来,计算实际物理速度就非常简单了,先计算像素速度,然后再乘以一个固定值即可得到实际物理速度。这种画面转换也需要提供一些参数,但是相比第1)种,参数来源简单许多。
视频车辆测速通常做法
常见的视频测速做法是,根据一系列参数,比如摄像机距离地面的垂直高度、摄像机焦距等,来计算两帧之间车辆的实际物理位移差,再除以两帧之间的时间,得到车辆的形式速度。该方式的前提是需要知道每个测量位置摄像机的属性参数,而现实中获取这些参数非常困难:
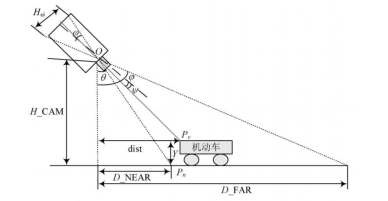
如上图,根据摄像机成像原理,三维空间在二维画面上投影之后,会存在对应角度关系,可以列出等式,计算机动车在路面行驶的实际距离。这种做法的前提是我们必须知道图中的H_CAM(摄像机距离地面的高度)、D_NEAR(摄像机成像最近点与摄像机垂直线之间的水平距离)以及D_FAR(摄像机成像最远点与摄像机垂直线之间的水平距离),而这些参数获取在现实应用场景中基本不可能做到。
另外一些视频测速的方式跟上面差不多,只是需要的参数有些差异,比如不需要D_NEAR和D_FAR的值,但是必须知道摄像机的焦距等参数,这些参数也是非常难以得到。
基于透视变换的车辆测速方法
前面提到过,如果将视频画面转换成俯视图,视角垂直于路面,这样能保证画面中每像素所代表的实际物理距离固定不变。任何目标运动速度都可以根据像素位移差和时间差计算得到。这种做法的前提是,如何将任意视频画面转换成俯视图?
熟悉OpenCV的童鞋可能知道,OpenCV中有透视转换的概念,如果我们知道原视频画面中一个真实矩形的四个顶点坐标,那么我们可以直接利用这四个顶点来计算图像的透视转换矩阵(原图->俯视图),得到透视转换矩阵后,我们就可以将源视频画面的任意一个点坐标转换成俯视图中的点坐标。假设源视频画面中,目标第N帧的坐标为(Xn、Yn),目标第M帧的坐标为(Xm、Ym),那么经过转换之后,在俯视图画面中,目标第N帧的坐标为(Xn`, Yn`),目标第M帧的坐标为(Xm`, Ym`),假设在短时间内,目标车辆沿道路方向做直线匀速运动,那么最终的Xn` 和 Xm`的值应该相等(水平位移分量为零),而(Ym` - Yn`)的值即为目标车辆沿道路方向行驶的像素距离,前面说到过,俯视图中的每像素距离代表的实际物理距离是固定不变的(假设为W),那么我们很容易得到目标车辆沿道路方向行驶的实际物理距离,即为 (Ym` - Yn`)*W。然后将得到的结果再除以N帧到M帧之间的时间 (M-N)*40ms,就可以得到目标车辆在这段时间内的平均速度(米/秒),如果M和N相差很小,假设相隔5帧,那么这个速度即可代表目标车辆的实时车速了。
上面这种测速方式的前提有两个:
(1)知道路面上一个真实矩形在源视频画面中的四个顶点坐标
(2)知道俯视图中每像素代表的实际物理距离
第(1)个前提相比获取摄像机与地面的垂直高度而言,要简单得多。实际应用场景中,路面有非常多的参照物可以来确定一个真实的矩形四个顶点坐标。第(2)个也比较容易,一般车道分割线都是由实线-虚线间隔而成的,而实线的长度是固定的(高速公路一般实线长度为6米),我们只需要在源视频画面中标定一根实线线段的起始点坐标即可,假设为(X1, Y1), (X2, Y2),通过转换矩阵将其转换成俯视图中的坐标,假设为(X1`, Y1`), (X2`, Y2`),由于车道分割线的方向与道路方向一致,那么X1`和X2`理论上应该相等(水平分量为零),6米/ (Y2` - Y1`)即可以代表俯视图中(车道方向)每像素代表的实际物理距离。
下图选取了路面中一个实际矩形在源视频画面中的四个顶点(红色),以及一个车道分割线参照线段的两个端点(黄色):

经过透视变换之后:

可以看到,经过透视变换之后生成的俯视图中,我们将路面的矩形还原成了“真正的”矩形,并且可以看到,车道分割线是均匀分布的,两条分割线也是平行的,这符合我们的预期,即:俯视图中,无论是道路的平行方向,还是道路的垂直方向,每像素所代表的实际物理距离是固定不变的。目标车辆在俯视图中,只会存在与道路平行方向的位移差,与道路垂直方向的分量为零,这符合俯视角度观察到的结果。
注意:需要忽略其他与道路不在同一个平面上的物体,这种透视变换只对道路平面有效。
另外再举一个摄像机角度比较好的例子:

上图是选取的矩形四个顶点,下图是透视变换之后的俯视图:

经过转换之后生成的俯视图,可以作为矩形标注的参考,如果发现生成的俯视图完全不对,那么说明标注的矩形四个顶点坐标有问题。
经过实际使用发现,这种测速误差在±6%之内,这种准确性虽然不能用于交通执法,但是对于交通状况监测还是非常有参考价值的。当然这种方法也有劣势:
(1)参考矩形不太好标注,有的路面甚至没有任何参照物。完全靠经验去尝试;
(2)有的路面没有距离参照物,比如不存在车道分割线(虚线),这种情况无法测速;
(3)测速结果的准确性对参照物的标注依赖很大,后者直接影响测速结果。
当然,它的优势前面已经提到了。本文只提供思路,没有代码。
[AI开发]目标跟踪之速度计算的更多相关文章
- [AI开发]目标跟踪之行为分析
基于视频结构化的应用中,目标在经过跟踪算法后,会得到一个唯一标识和它对应的运动轨迹,利用这两个数据我们可以做一些后续工作:测速(交通类应用场景).计数(交通类应用场景.安防类应用场景)以及行为检测(交 ...
- [AI开发]目标跟踪之计数
基于视频结构化的应用中,目标在经过跟踪算法后,会得到一个唯一标识和它对应的运动轨迹,利用这两个数据我们可以做一些后续工作:测速(交通类应用场景).计数(交通类应用场景.安防类应用场景)以及行为检测(交 ...
- [AI开发]目标检测之素材标注
算力和数据是影响深度学习应用效果的两个关键因素,在算力满足条件的情况下,为了到达更好的效果,我们需要将海量.高质量的素材数据喂给神经网络,训练出高精度的网络模型.吴恩达在深度学习公开课中提到,在算力满 ...
- [AI开发]Python+Tensorflow打造自己的计算机视觉API服务
"与其停留在概念理论层面,不如动手去实现一个简单demo ." ——鲁迅 没有源码都是耍流氓github 前言 目前提供AI开发相关API接口的公司有很多,国外如微软. ...
- CVPR2018 关于视频目标跟踪(Object Tracking)的论文简要分析与总结
本文转自:https://blog.csdn.net/weixin_40645129/article/details/81173088 CVPR2018已公布关于视频目标跟踪的论文简要分析与总结 一, ...
- HUAWEI HiAI亮相华为开发者生态大会 助力应用AI开发实现加速度
6月23日,在2018华为终端·全球合作伙伴及开发者大会AI分论坛体验区的一角,被层层叠叠的人群围得水泄不通.站在最前面的一名体验者,正跟随着“快手短视频”APP上不断出现的小人左右扭动,每完成一个动 ...
- 用于扩展目标跟踪的笛卡尔B-Spline车辆模型
(哥廷根大学) 摘要 文章提出了一种表示空间扩展物体轮廓的新方法,该方法适用于采用激光雷达跟踪未知尺寸和方向的车辆.我们在笛卡尔坐标系中使用二次均匀周期的B-Splines直接表示目标的星 - 凸形状 ...
- 百度AI开发平台简介
AIstudio https://aistudio.baidu.com/aistudio/index 关于AI Studio AI Studio是基于百度深度学习平台飞桨的一站式AI开发平台,提供在线 ...
- 华为全栈AI技术干货深度解析,解锁企业AI开发“秘籍”
摘要:针对企业AI开发应用中面临的痛点和难点,为大家带来从实践出发帮助企业构建成熟高效的AI开发流程解决方案. 在数字化转型浪潮席卷全球的今天,AI技术已经成为行业公认的升级重点,正在越来越多的领域为 ...
随机推荐
- 【转载】FusionSphere架构详解
FusionSphere底层使用Xen架构: 1.单台物理机上建立hypervisor系统. 2.将所有单个hypervisor系统整合起来管理使用. 安装CNA节点,所有的物理服务器都会先成为CNA ...
- style原则问题
就近原则 1.“行内”覆盖“嵌入”,“嵌入”覆盖“外部”Style.xml <Window.Resources> <Grid.Resources> ….中间层 <Butt ...
- C#串口控制舵机、arduino源码 及C#源码及界面
原文 C#串口控制舵机.arduino源码 及C#源码及界面 1.舵机原理简介 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压.它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基 ...
- Linux ADF(Atomic Display Framework)浅析---概述
概述 因为工作关系,最近有涉及到ADF(Atomic Display Framework)相关的内容,部分内容来自互联网 ADF(Atomic Display Framework)是Google新增的 ...
- 彻底删除kafka topic步骤
基于kafka-2.11-0.9.0.0 . a.kill掉kafka进程,然后在server.properties里面加上delete.topic.enable=true.重启kafka.集群中的每 ...
- QT创建窗口程序、消息循环和WinMain函数(为主线程建立了一个QEventLoop,并执行exec函数)
使用QT也有一段时间了,有的时候需要跟踪代码到QT的源码中去查找问题.在这里我将记录一下我跟踪QT源码学习到的一些知识. 我的开发环境是VC6.0+QT4.3.3.QT已经不为VC6.0提供addin ...
- Delphi XE6 如何设计并使用FireMonkeyStyle
介绍 FireMonkey使用Style来控制控件的显示方式. 每个控件都有一个StyleLookup属性,FireMonkey就是通过控件的这个属性来在当前窗体的StyleBook控件中查找匹配 ...
- [android自动化构建]之centos安装gradle
这是android自动化构建系列之环境配置 这里只记录部分gradle相关的配置 下载并解压 下载地址参考这里:https://services.gradle.org/distributions/,未 ...
- shell日期整理
date 当前日期+时间 # 日期格式化:date+"" - date +"%Y%m%d" 不带横杠分隔符的日期20160107 date +"%Y% ...
- play框架之ORM
初次接触play2,采用的ebeans作为ORM框架.网上的资料并不多,总结如下: 数据的查询可以放在model类里,也可以放在controllers里面,我更倾向于后者,感觉数据流比较完整,好理解, ...