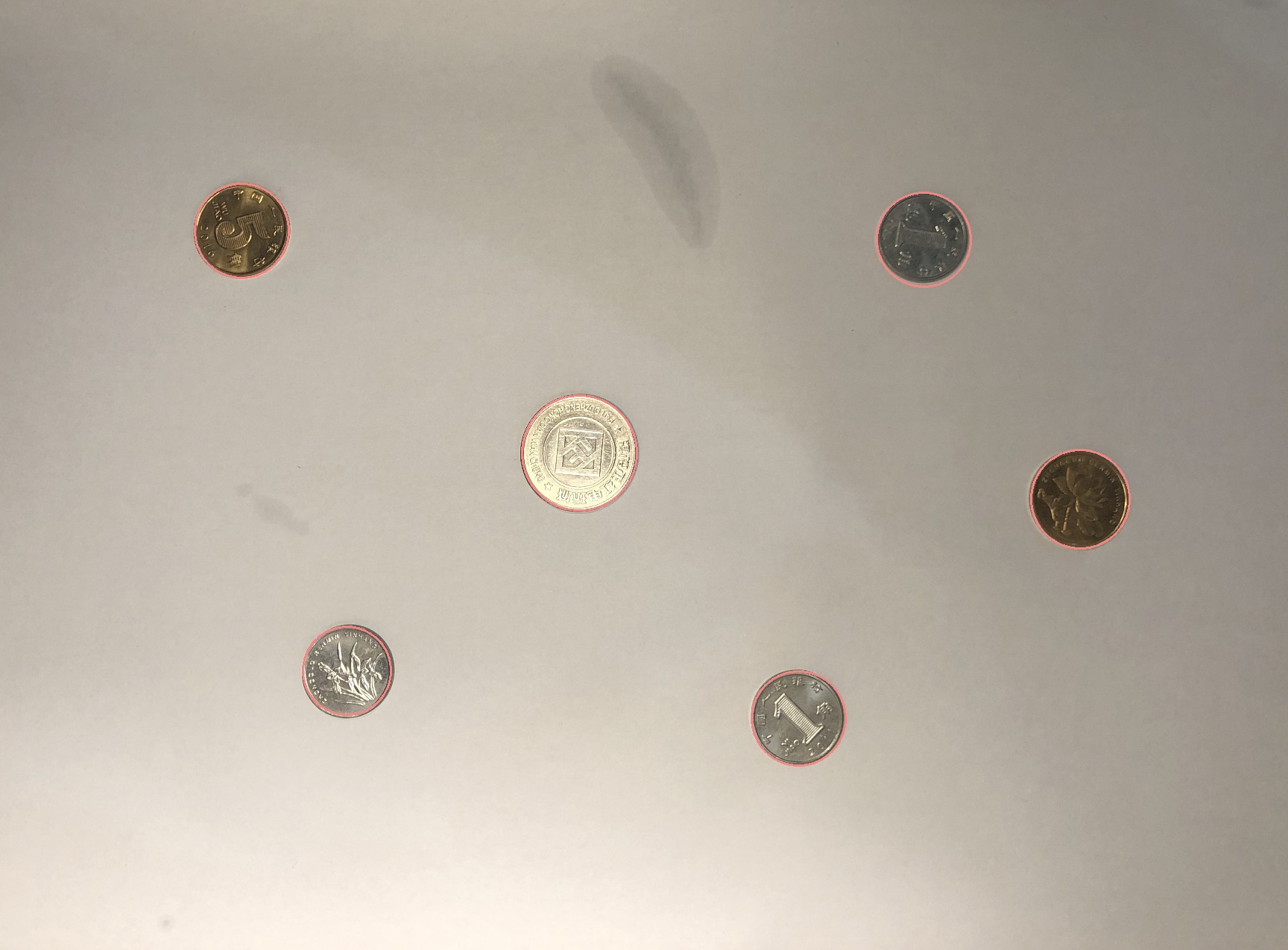
使用Canny+hough实现钱币检测
这个是北京邮电大学《计算机视觉》的一门作业:
Canny边缘提取算法实现
首先定义一个Canny类
其init函数是:
class Canny:
def __init__(self, Guassian_kernal_size, img, HT_high_threshold, HT_low_threshold):
'''
:param Guassian_kernal_size: 高斯滤波器尺寸
:param img: 输入的图片(灰度图),在算法过程中改变
:param HT_high_threshold: 滞后阈值法中的高阈值
:param HT_low_threshold: 滞后阈值法中的低阈值
'''
self.Guassian_kernal_size = Guassian_kernal_size
self.img = img
self.y, self.x = img.shape[0:2]
self.angle = np.zeros([self.y, self.x]) # 图片的梯度方向
self.img_origin = None
self.x_kernal = np.array([[-1, 1]])
self.y_kernal = np.array([[-1], [1]])
self.HT_high_threshold = HT_high_threshold
self.HT_low_threshold = HT_low_threshold
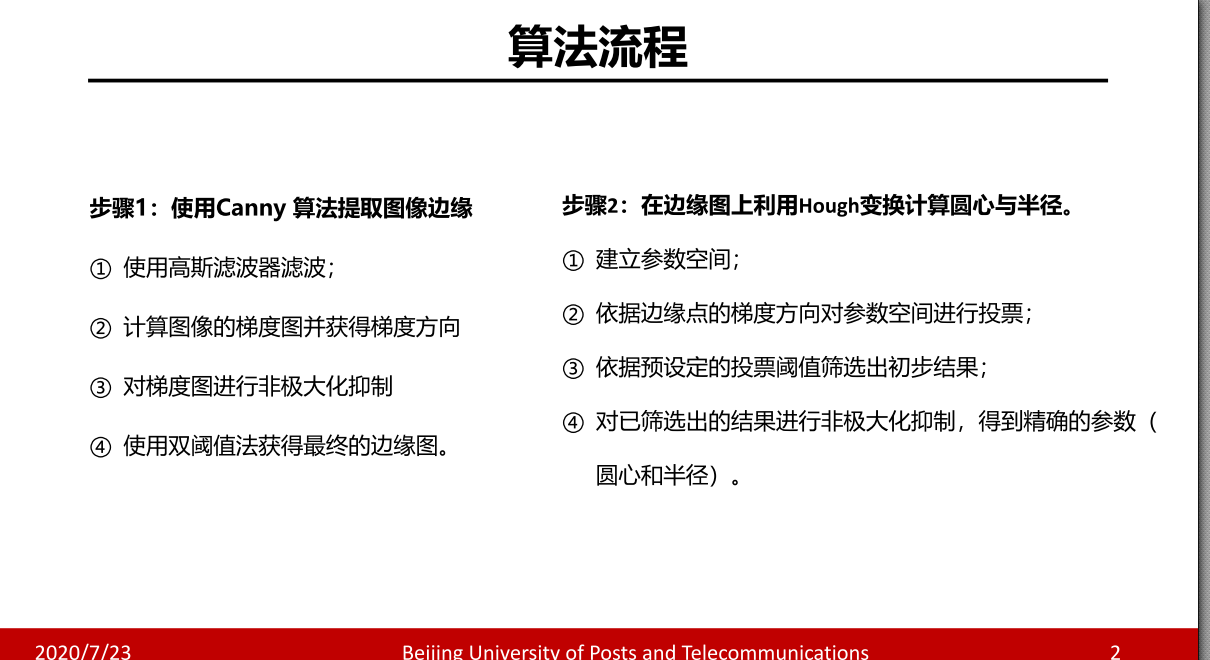
计算图像的梯度图并获得梯度方向(Canny类的方法,下同)
def Get_gradient_img(self):
'''
计算梯度图和梯度方向矩阵。
:return: 生成的梯度图
'''
print ('Get_gradient_img')
# ------------- write your code bellow ----------------
new_img_x = np.zeros([self.y, self.x], dtype=np.float)
new_img_y = np.zeros([self.y, self.x], dtype=np.float)
for i in range(0, self.x):
for j in range(0, self.y):
if j == 0:
new_img_y[j][i] = 1
else:
new_img_y[j][i] = np.sum(np.array([[self.img[j - 1][i]], [self.img[j][i]]]) * self.y_kernal)
if i == 0:
new_img_x[j][i] = 1
else:
new_img_x[j][i] = np.sum(np.array([self.img[j][i - 1], self.img[j][i]]) * self.x_kernal) gradient_img, self.angle = cv2.cartToPolar(new_img_x, new_img_y) #返回下图中的两个值
self.angle = np.tan(self.angle)
self.img = gradient_img.astype(np.uint8)
return self.img
# ------------- write your code above ----------------

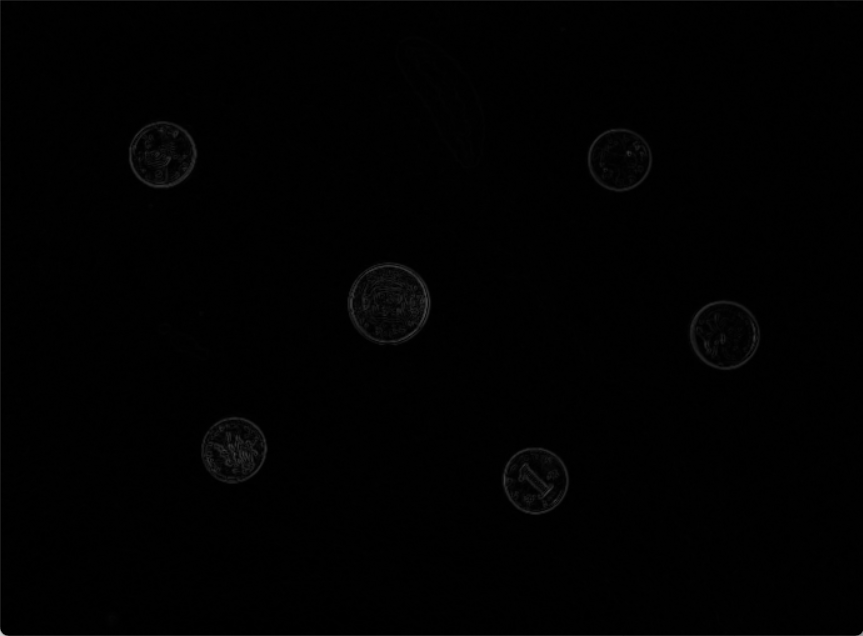
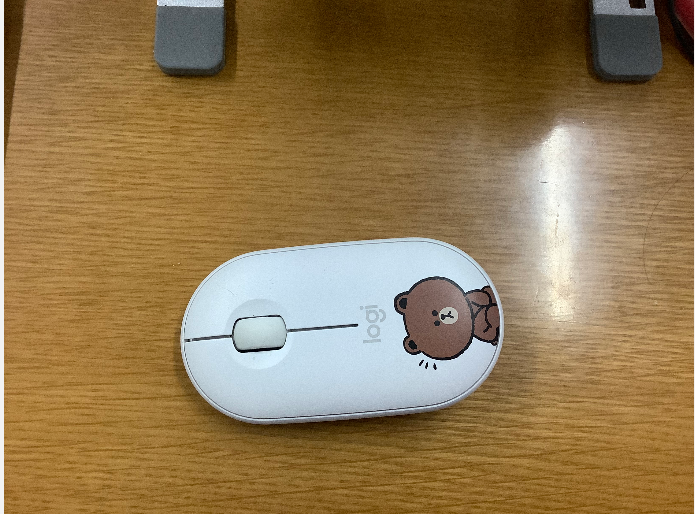
result
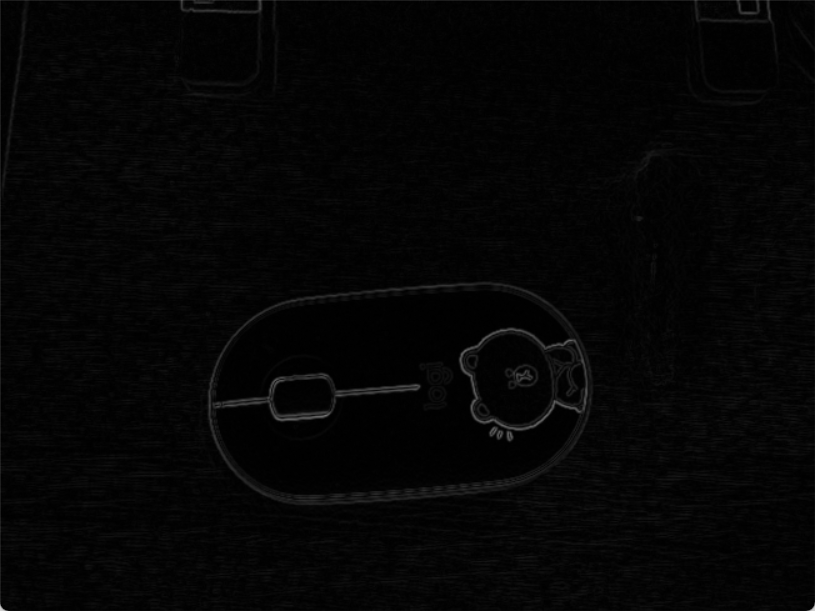
| image | image2(灰度图,高斯滤波) | 梯度 | image2+梯度 |
|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
梯度值经过等比放缩,image2+梯度 图像不明显是因为梯度值普遍较小,未经过非最大值抑制的梯度图像线条较粗
非极大化抑制
在梯度矩阵B上进行非极大值运算处理,可以直接比较中心点0,90,45,135四个方向的梯度值,若该点是最大值,则保留。否则为0,即假设在梯度矩阵中的某点为中心点C(i,j),则该点的取值为C(i,j) 是否满足在(C(i,j), C(i,j+1), C(i+1,j), C(i+1, j+1))为最大值,若是保留,否则为0。
但由于实际图像中的像素点是离散的二维矩阵,处于真正中心位置C出的梯度方向的两侧的点不一定存在,或者说存在一个亚像素点,而这个不存在的点以及这个点的梯度值就必须通过两侧的点插值得到。 这句话我的理解是,以中心点C的梯度方向做一条斜线,用斜线与周围梯度值的交点 和 中心点C的梯度值比较判断其是否为最大值。
来个图说明一下: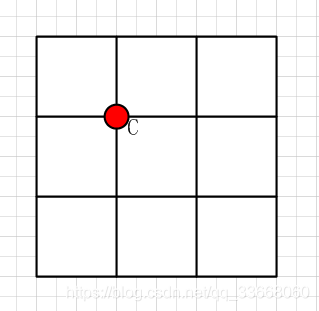
C 为中心点,梯度值为d(i,j);
在x方向的梯度为dx(i,j);
在y方向的梯度值为:dy(i,j);
则过C点的梯度方向线共有4中情况:
1) |dy|>|dx|,且dxdy>0; 2) |dy|>|dx|,且dxdy<0; 3) |dy|<|dx|,且dxdy>0; 4) |dy|<|dx|,且dxdy<0.
四种情况在图中显示如下所示:
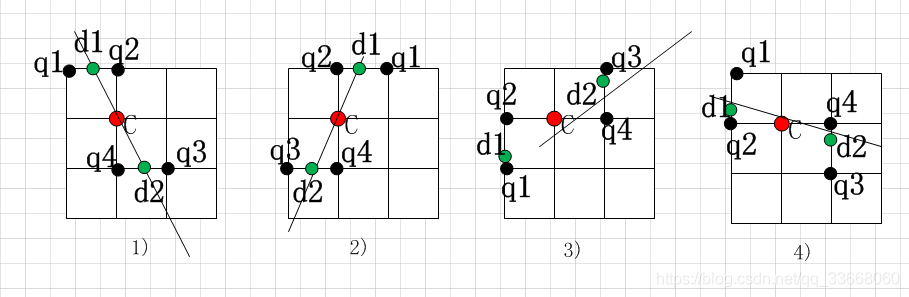
其中: q1,q2,q3,q4分别代表与在梯度矩阵中与C相关的相邻点。
当|dy|>|dx|时,共有2种情况:1)和2),此时weight=|dx|/|dy|.
由线与线之间的相交关系,结合三角形,即可求得:
d1 = weightq1+(1-weight)q2;
d2 = weightq3+(1-weight)q4;
当|dx|>|dy|时,共有2种情况:3)和4),此时weight=|dy|/|dx|.
同理,d1 = weightq1+(1-weight)q2; d2 = weightq3+(1-weight)q4;
然后,比较d(i,j)>=d1,且d(i,j)>=d2是否成立,若满足,保留d,否则d=0。[1]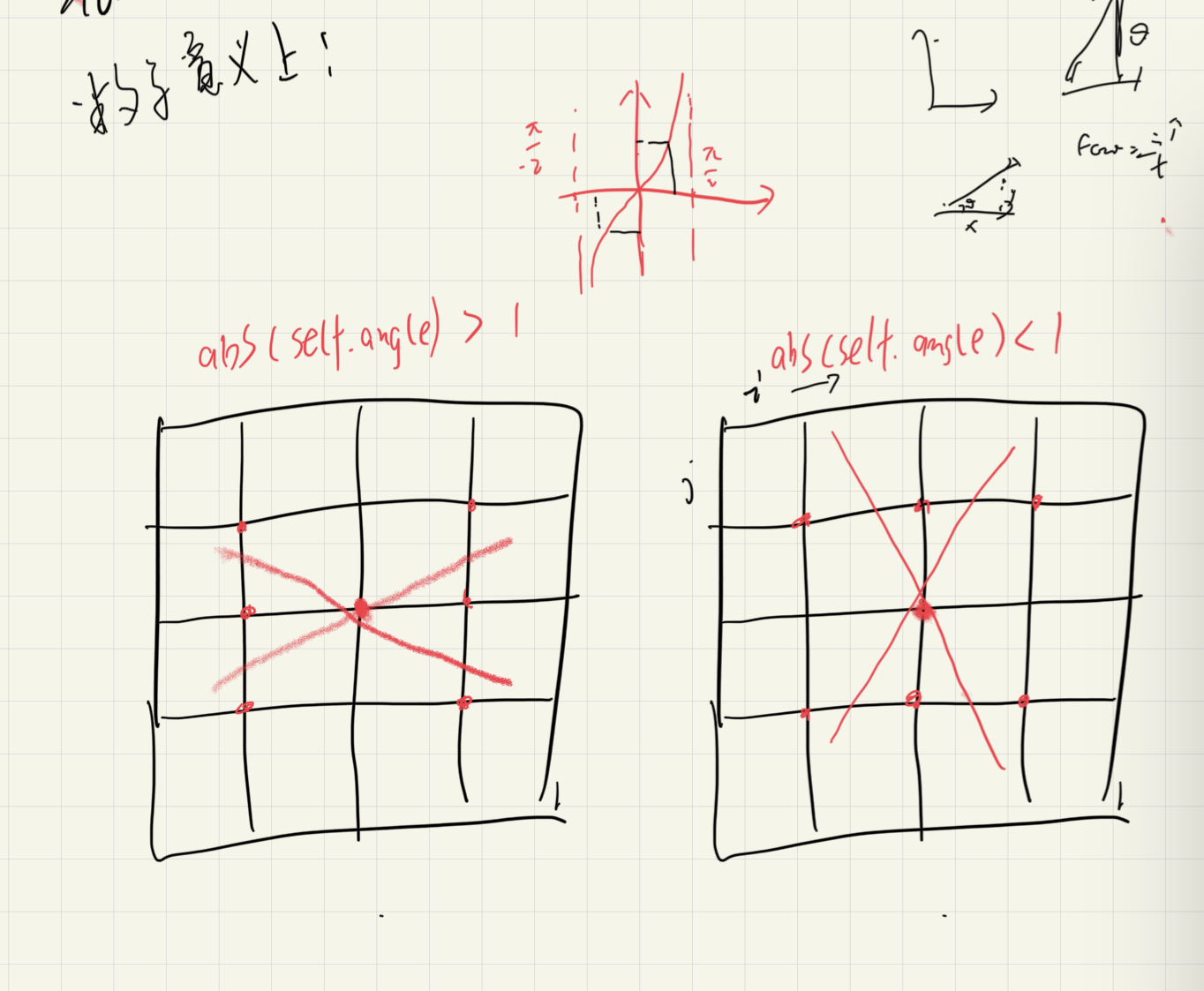
def Non_maximum_suppression(self):
'''
对生成的梯度图进行非极大化抑制,将tan值的大小与正负结合,确定离散中梯度的方向。
:return: 生成的非极大化抑制结果图
'''
print('Non_maximum_suppression')
# ------------- write your code bellow ----------------
result = np.zeros([self.y, self.x]) for i in range(1, self.y - 1):
for j in range(1, self.x - 1):
# 对于梯度过小的值可以忽略
if abs(self.img[i][j]) < 6:
result[i][j] = 0
continue
elif abs(self.angle[i][j]) > 1:
gradient2 = self.img[i - 1][j]
gradient4 = self.img[i + 1][j]
# g1 g2
# C
# g4 g3
if self.angle[i][j] > 0:
gradient1 = self.img[i - 1][j - 1]
gradient3 = self.img[i + 1][j + 1]
# g2 g1
# C
# g3 g4
else:
gradient1 = self.img[i - 1][j + 1]
gradient3 = self.img[i + 1][j - 1]
else:
gradient2 = self.img[i][j - 1]
gradient4 = self.img[i][j + 1]
# g1
# g2 C g4
# g3
if self.angle[i][j] > 0:
gradient1 = self.img[i - 1][j - 1]
gradient3 = self.img[i + 1][j + 1]
# g3
# g2 C g4
# g1
else:
gradient3 = self.img[i - 1][j + 1]
gradient1 = self.img[i + 1][j - 1] temp1 = abs(self.angle[i][j]) * gradient1 + (1 - abs(self.angle[i][j])) * gradient2
temp2 = abs(self.angle[i][j]) * gradient3 + (1 - abs(self.angle[i][j])) * gradient4
if self.img[i][j] >= temp1 and self.img[i][j] >= temp2:
result[i][j] = self.img[i][j]
else:
result[i][j] = 0
self.img = result # ------------- write your code above ----------------
return self.img
双阈值法
在施加非极大值抑制之后,剩余的像素可以更准确地表示图像中的实际边缘。然而,仍然存在由于噪声和颜色变化引起的一些边缘像素。为了解决这些杂散响应,必须用弱梯度值过滤边缘像素,并保留具有高梯度值的边缘像素,可以通过选择高低阈值来实现。如果边缘像素的梯度值高于高阈值,则将其标记为强边缘像素;如果边缘像素的梯度值小于高阈值并且大于低阈值,则将其标记为弱边缘像素;如果边缘像素的梯度值小于低阈值,则会被抑制。阈值的选择取决于给定输入图像的内容。
双阈值检测的伪代码描写如下:
抑制孤立低阈值点
到目前为止,被划分为强边缘的像素点已经被确定为边缘,因为它们是从图像中的真实边缘中提取出来的。然而,对于弱边缘像素,将会有一些争论,因为这些像素可以从真实边缘提取也可以是因噪声或颜色变化引起的。为了获得准确的结果,应该抑制由后者引起的弱边缘。通常,由真实边缘引起的弱边缘像素将连接到强边缘像素,而噪声响应未连接。为了跟踪边缘连接,通过查看弱边缘像素及其8个邻域像素,只要其中一个为强边缘像素,则该弱边缘点就可以保留为真实的边缘。
抑制孤立边缘点的伪代码描述如下:
[2]代码:
def Hysteresis_thresholding(self):
'''
:return: 滞后阈值法结果图
'''
print('Hysteresis_thresholding')
# ------------- write your code bellow ---------------- for i in range(1, self.y - 1):
for j in range(1, self.x - 1):
if self.img[i][j] >= self.HT_high_threshold:
if abs(self.angle[i][j]) < 1:
if self.img_origin[i - 1][j] > self.HT_low_threshold:
self.img[i - 1][j] = self.HT_high_threshold
if self.img_origin[i + 1][j] > self.HT_low_threshold:
self.img[i + 1][j] = self.HT_high_threshold
# g1 g2
# C
# g4 g3
if self.angle[i][j] < 0:
if self.img_origin[i - 1][j - 1] > self.HT_low_threshold:
self.img[i - 1][j - 1] = self.HT_high_threshold
if self.img_origin[i + 1][j + 1] > self.HT_low_threshold:
self.img[i + 1][j + 1] = self.HT_high_threshold
# g2 g1
# C
# g3 g4
else:
if self.img_origin[i - 1][j + 1] > self.HT_low_threshold:
self.img[i - 1][j + 1] = self.HT_high_threshold
if self.img_origin[i + 1][j - 1] > self.HT_low_threshold:
self.img[i + 1][j - 1] = self.HT_high_threshold
else:
if self.img_origin[i][j - 1] > self.HT_low_threshold:
self.img[i][j - 1] = self.HT_high_threshold
if self.img_origin[i][j + 1] > self.HT_low_threshold:
self.img[i][j + 1] = self.HT_high_threshold
# g1
# g2 C g4
# g3
if self.angle[i][j] < 0:
if self.img_origin[i - 1][j - 1] > self.HT_low_threshold:
self.img[i - 1][j - 1] = self.HT_high_threshold
if self.img_origin[i + 1][j + 1] > self.HT_low_threshold:
self.img[i + 1][j + 1] = self.HT_high_threshold
# g3
# g2 C g4
# g1
else:
if self.img_origin[i - 1][j + 1] > self.HT_low_threshold:
self.img[i + 1][j - 1] = self.HT_high_threshold
if self.img_origin[i + 1][j - 1] > self.HT_low_threshold:
self.img[i + 1][j - 1] = self.HT_high_threshold
return self.img
# ------------- write your code above ----------------
return self.img
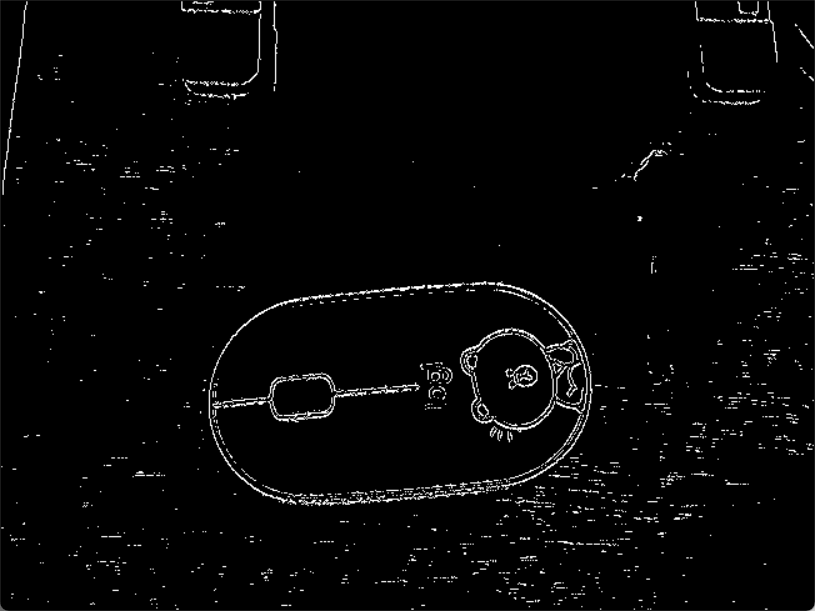
至此,利用Canny提取边缘算法完成。
霍夫变换实现
import numpy as np
import math
class Hough_transform:
def __init__(self, img, angle, step=5, threshold=135):
'''
:param img: 输入的图像
:param angle: 输入的梯度方向矩阵
:param step: Hough 变换步长大小
:param threshold: 筛选单元的阈值
'''
self.img = img
self.angle = angle
self.y, self.x = img.shape[0:2]
self.radius = math.ceil(math.sqrt(self.y**2 + self.x**2))
self.step = step
self.vote_matrix = np.zeros([math.ceil(self.y / self.step), math.ceil(self.x / self.step), math.ceil(self.radius / self.step)])
self.threshold = threshold
self.circles = []
def Hough_transform_algorithm(self):
'''
按照 x,y,radius 建立三维空间,根据图片中边上的点沿梯度方向对空间中的所有单
元进行投票。每个点投出来结果为一折线。
:return: 投票矩阵
'''
print ('Hough_transform_algorithm')
for i in range(1, self.y - 1):
for j in range(1, self.x - 1):
if self.img[i][j] > 0:
y = i
x = j
r = 0
while y < self.y and x < self.x and y >= 0 and x >= 0:
self.vote_matrix[math.floor(y / self.step)][math.floor(x / self.step)][math.floor(r / self.step)] += 1
y = y + self.step * self.angle[i][j]
x = x + self.step
r = r + math.sqrt((self.step * self.angle[i][j])**2 + self.step**2)
y = i - self.step * self.angle[i][j]
x = j - self.step
r = math.sqrt((self.step * self.angle[i][j])**2 + self.step**2)
while y < self.y and x < self.x and y >= 0 and x >= 0:
self.vote_matrix[math.floor(y / self.step)][math.floor(x / self.step)][math.floor(r / self.step)] += 1
y = y - self.step * self.angle[i][j]
x = x - self.step
r = r + math.sqrt((self.step * self.angle[i][j])**2 + self.step**2)
return self.vote_matrix
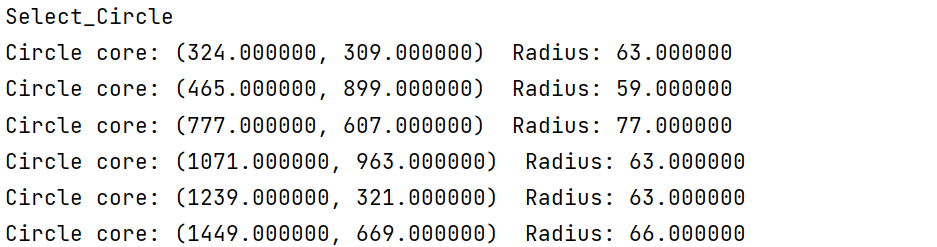
def Select_Circle(self):
'''
按照阈值从投票矩阵中筛选出合适的圆,并作极大化抑制,这里的非极大化抑制我采
用的是邻近点结果取平均值的方法,而非单纯的取极大值。
:return: None
'''
print ('Select_Circle')
houxuanyuan = []
for i in range(0, math.ceil(self.y / self.step)):
for j in range(0, math.ceil(self.x / self.step)):
for r in range(0, math.ceil(self.radius / self.step)):
if self.vote_matrix[i][j][r] >= self.threshold:
y = i * self.step + self.step / 2
x = j * self.step + self.step / 2
r = r * self.step + self.step / 2
houxuanyuan.append((math.ceil(x), math.ceil(y), math.ceil(r)))
if len(houxuanyuan) == 0:
print("No Circle in this threshold.")
return
x, y, r = houxuanyuan[0]
possible = []
middle = []
for circle in houxuanyuan:
if abs(x - circle[0]) <= 20 and abs(y - circle[1]) <= 20:
possible.append([circle[0], circle[1], circle[2]])
else:
result = np.array(possible).mean(axis=0)
middle.append((result[0], result[1], result[2]))
possible.clear()
x, y, r = circle
possible.append([x, y, r])
result = np.array(possible).mean(axis=0)
middle.append((result[0], result[1], result[2]))
def takeFirst(elem):
return elem[0]
middle.sort(key=takeFirst)
x, y, r = middle[0]
possible = []
for circle in middle:
if abs(x - circle[0]) <= 20 and abs(y - circle[1]) <= 20:
possible.append([circle[0], circle[1], circle[2]])
else:
result = np.array(possible).mean(axis=0)
print("Circle core: (%f, %f) Radius: %f" % (result[0], result[1], result[2]))
self.circles.append((result[0], result[1], result[2]))
possible.clear()
x, y, r = circle
possible.append([x, y, r])
result = np.array(possible).mean(axis=0)
print("Circle core: (%f, %f) Radius: %f" % (result[0], result[1], result[2]))
self.circles.append((result[0], result[1], result[2]))
def Calculate(self):
'''
按照算法顺序调用以上成员函数
:return: 圆形拟合结果图,圆的坐标及半径集合
'''
self.Hough_transform_algorithm()
self.Select_Circle()
return self.circles
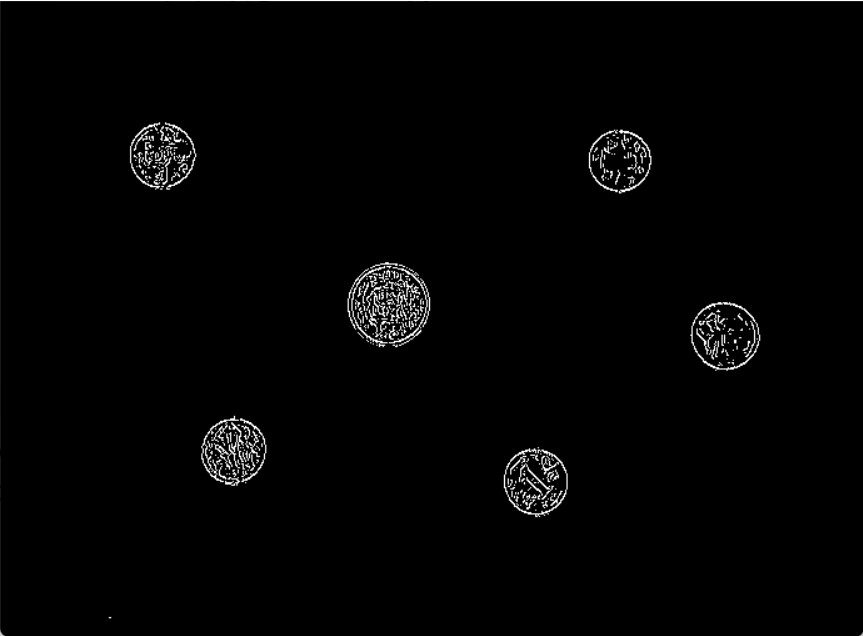
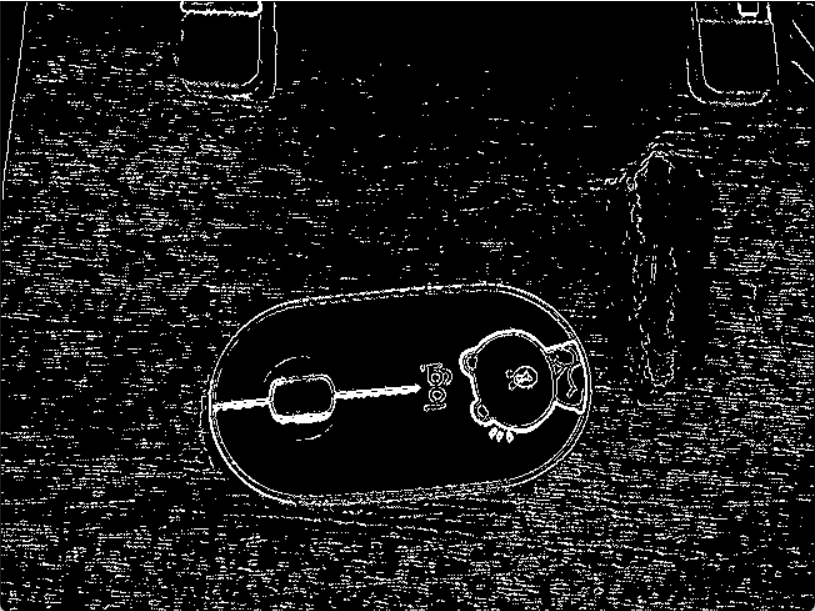
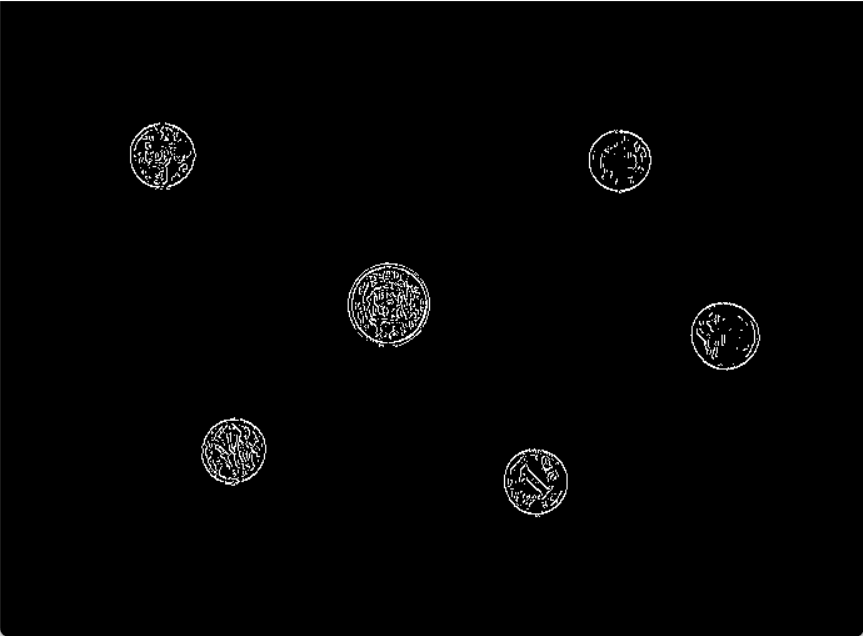
result:
参考
- [1] Canny算子中的梯度求取及非最大值抑制(NMS)实现
- [2]nowgood:边缘检测之canny
使用Canny+hough实现钱币检测的更多相关文章
- 目标检测之hough forest---霍夫森林(Hough Forest)目标检测算法
Hough Forest目标检测一种比较时兴的目标检测算法,Juergen Gall在2009的CVPR上提出. Hough Forest听上去像hough变换+Random Forest的结合体, ...
- Hough Transform直线检测
本文原创,如转载请注明出处. Hough Transform 是一种能提取图像中某种特定形状特征的方法,可以将其描述成一种把图像空间中的像素转换成Hough空间中直线或曲线的一种映射函数.通过利用Ho ...
- CHEVP算法(Canny/Hough Estimation of Vanishing Points)
这个算法是汪悦在 Lane detection and tracking using B-spline中提出来的.他在这篇论文中主要用的是B-spline模型,这个模型的主要优点是鲁棒性好,可以针对不 ...
- hough变换是如何检测出直线和圆的?
(I)直线篇 1 直线是如何表示的?对于平面中的一条直线,在笛卡尔坐标系中,常见的有点斜式,两点式两种表示方法.然而在hough变换中,考虑的是另外一种表示方式:使用(r,theta)来表示一条直线. ...
- 霍夫变换Hough
http://blog.csdn.net/sudohello/article/details/51335237 霍夫变换Hough 霍夫变换(Hough)是一个非常重要的检测间断点边界形状的方法.它通 ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- Canny边缘检测-Wiki
Canny edge dector 由 John F. Canny 在1986年提出. Canny 算法的发展 Canny算法的步骤 2.1 降噪 2.2 寻找图像的亮度梯度 2.3 非极大值抑制 2 ...
- Hough transform(霍夫变换)
主要内容: 1.Hough变换的算法思想 2.直线检测 3.圆.椭圆检测 4.程序实现 一.Hough变换简介 Hough变换是图像处理中从图像中识别几何形状的基本方法之一.Hough变换的基本原理在 ...
- 机器学习进阶-图像金字塔与轮廓检测-轮廓检测 1.cv2.cvtColor(图像颜色转换) 2.cv2.findContours(找出图像的轮廓) 3.cv2.drawContours(画出图像轮廓) 4.cv2.contourArea(轮廓面积) 5.cv2.arcLength(轮廓周长) 6.cv2.aprroxPloyDP(获得轮廓近似) 7.cv2.boudingrect(外接圆)..
1. cv2.cvtcolor(img, cv2.COLOR_BGR2GRAY) # 将彩色图转换为灰度图 参数说明: img表示输入的图片, cv2.COLOR_BGR2GRAY表示颜色的变换形式 ...
随机推荐
- 【LeetCode】783. Minimum Distance Between BST Nodes 解题报告(Python)
作者: 负雪明烛 id: fuxuemingzhu 个人博客: http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 中序遍历 日期 题目地址:https://leetc ...
- Docker 与 K8S学习笔记(七)—— 容器的网络
本节我们来看看Docker网络,我们这里主要讨论单机docker上的网络.当docker安装后,会自动在服务器中创建三种网络:none.host和bridge,接下来我们分别了解下这三种网络: $ s ...
- 《机器学习实战》kNN算法及约会网站代码详解
使用kNN算法进行分类的原理是:从训练集中选出离待分类点最近的kkk个点,在这kkk个点中所占比重最大的分类即为该点所在的分类.通常kkk不超过202020 kNN算法步骤: 计算数据集中的点与待分类 ...
- Java初学者作业——编写JAVA程序,在控制台输入一位学生的英语考试成绩,根据评测规则,输出对应的成绩等级。定义方法实现学生成绩的评测功能。
返回本章节 返回作业目录 需求说明: 编写JAVA程序,在控制台输入一位学生的英语考试成绩,根据评测规则,输出对应的成绩等级.要求:定义方法实现学生成绩的评测功能. 学生的英语考试成绩进行评测,评测规 ...
- MATLAB 不同维度矩阵加减乘除
>> A=[1,2,3;4,5,6;7,8,9],B=[1,2;3,4] A = 1 2 3 4 5 6 7 8 9 B = 1 2 3 4 >> [rA,cA]=size(A ...
- MyBatis 一级缓存实现详解及使用注意事项
一级缓存介绍 在应用运行过程中,我们有可能在一次数据库会话中,执行多次查询条件完全相同的SQL,MyBatis提供了一级缓存的方案优化这部分场景,如果是相同的SQL语句,会优先命中一级缓存,避免直接对 ...
- nginx及依赖包安装分享 百度网盘(pcre+openssl+zlib)
链接:https://pan.baidu.com/s/1gggq1p-uZSmAw49o5xfl4g 提取码:ypoj 复制这段内容后打开百度网盘手机App,操作更方便哦 1.安装pcre 解压:ta ...
- 重大升级!灵雀云发布全栈云原生开放平台ACP 3.0
云原生技术的发展正在改变全球软件业的格局,随着云原生技术生态体系的日趋完善,灵雀云的云原生平台也进入了成熟阶段.近日,灵雀云发布重大产品升级,推出全栈云原生开放平台ACP 3.0.作为面向企业级用户的 ...
- host解析
首先了解一下什么是hosts文件: hosts是一个没有扩展名的系统文件,可以用记事本等文本编辑工具打开,起作用就是将一些常用的"网址域名"与其对应的"IP地址" ...
- Sentry 开发者贡献指南 - 配置 PyCharm
概述 如果您使用 PyCharm 进行开发,则需要配置一些内容才能运行和调试. 本文档描述了一些对 sentry 开发有用的配置 配置 Python 解释器:(确保它是 venv 解释器)例如 ~/v ...