MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言
CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议。CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管理模块。
本篇文章以TPYBoardv102开发板为例,为大家介绍一下如何使用STM32自带的CAN控制器,来实现两个开发板之间的CAN通讯。
0x01实验器材
TPYBoardv102开发板2块
杜邦线若干
CAN总线收发器模块VP230(SN65HVD230)2个
0x02前期准备
1. TPYBoardv102的CAN控制器。
v102上有两个CAN控制器,分别为CAN1和CAN2,对应引脚如下:
|
CAN1(RX) |
Y3 |
|
CAN1(TX) |
Y4 |
|
CAN2(RX) |
Y5 |
|
CAN2(TX) |
Y6 |
v102上虽然已经有两个CAN控制器,但是想要完成两个板子之间的CAN通讯,还需要搭配CAN收发器模块。CAN收发器就是CAN控制器和物理总线之间的接口,主要作用就是将CAN控制器的逻辑电平转换为CAN总线的差分电平,在两条有差分电压的总线电缆上传输数据。
2. 去tpyboard的官网看看CAN类库的介绍。
http://docs.tpyboard.com/zh/latest/library/pyb.CAN/?highlight=pyb.CAN
看一下官方的实例代码,这些基本上够用了。
from pyb import CAN
can = CAN(1, CAN.LOOPBACK)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126)) # set a filter to receive messages with id=123, 124, 125 and 126
can.send('message!', 123) # send a message with id 123
can.recv(0) # receive message on FIFO 0
0x03硬件连接
两个v102我用的都是CAN1。具体连接示意图如下:
|
TPYBoard v102 (CAN1) |
CAN收发器模块 |
|
3.3V |
VCC |
|
GND |
GND |
|
Y3(RX) |
RX |
|
Y4(TX) |
TX |
两个收发器之间H接H、L接L即可。
0x04源代码
第一个板子等待接收,当接收到数据再发送。
import pyb
from pyb import CAN can = CAN(1, CAN.NORMAL)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126)) # set a filter to receive messages with id=123, 124, 125 and 126
while True:
if can.any(0):
data=can.recv(0) # receive message on FIFO 0
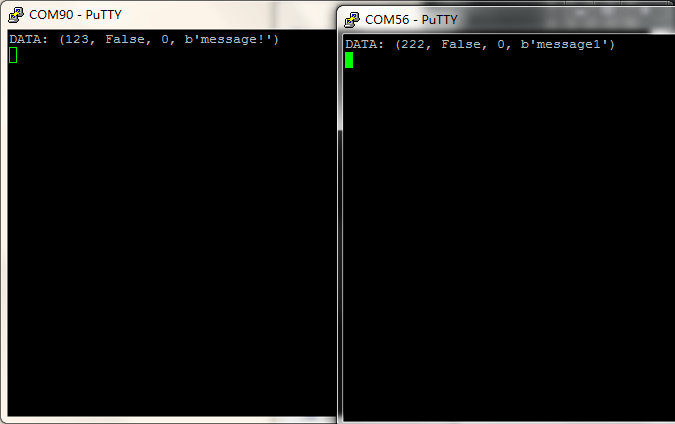
print('DATA:',data)
can.send(b'message1',222)
第二板子是先发送,然后等待接收。
# main.py -- put your code here!
from pyb import CAN
can = CAN(2, CAN.NORMAL)
can.setfilter(0, CAN.LIST16, 0, (222,221,231,241)) # set a filter to receive messages with id=123, 124, 125 and 126
can.send('message!', 123) # send a message with id 123
while True:
if can.any(0):
data=can.recv(0) # receive message on FIFO 0
print('DATA:',data)
0x05效果图
MicroPython教程之TPYBoard v102 CAN总线通信的更多相关文章
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的 学习在PC机系统中扩展简单I/O接口的方法. 进一步学习编制数据输出程序的设计方法. 学习蓝牙模块的接线方法及其工作原理. 学习L298N电机驱动板模块的接线方法. 学习蓝牙控制小车的工 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- Micropython教程之TPYBoardv102 DIY蓝牙智能小车实例
1.实验目的 1.学习在PC机系统中扩展简单I/O接口的方法. 2.进一步学习编制数据输出程序的设计方法. 3.学习蓝牙模块的接线方法及其工作原理. 4.学习L298N电机驱动板模块的接线方法. 5. ...
- MicroPython TPYBoard v102 无线红外遥控舵机(基于红外解/编码模块)
转载请注明文章来源,更多教程可自助参考docs.tpyboard.com,QQ技术交流群:157816561,公众号:MicroPython玩家汇 红外解码/编码模块介绍 模块上搭载了红外接收头.红外 ...
- MicroPython之TPYBoard v102开发板控制OLED显示中文
转载请以链接形式注明文章来源,公众号:MicroPython玩家汇 0x00前言 之前看到一篇文章是关于TPYBoardv102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近 ...
- MicroPython开发板:TPYBoard v102 播放音乐实例
0x00前言 前段时间看到TPYBoard的技术交流群(群号:157816561,)里有人问关于TPYBoard播放音乐的问题.最近抽空看了一下文档介绍,着手做了个实验.更多MicroPython的教 ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
随机推荐
- let 和 const
let命令 1.let命令只在所在的代码快内有效 { let a = 'hello world' console.log(a) //hello world } console.log(a) //Unc ...
- 阿里云服务器部署php的laravel项目,在阿里云买ECS 搭建 Linux+Nginx+Mysql+PHP环境的
在阿里云买ECS的时候选择自己习惯的镜像系统,我一般都是使用Linux Ubuntu,所以,以下的配置都是在Ubuntu 14.04稳定支持版的环境中搭建Linux+Nginx+Mysql+PHP环境 ...
- Nexys3学习手记1:写在前面的话
偶然的机会,结识了xilinx的几位大牛,便毫不客气的从他们的手中接过了基于Spartan-6的由Digilent公司研发的Nexys3开发板(如图1所看到的).记得非常久非常久曾经初识FPGA的时候 ...
- JVM垃圾收集相关经常使用參数
參 数 描 述 UseSerialGC 虚拟机执行在Client 模式下的默认值,打开此开关后,使用Serial + Serial Old 的收集器组合进行内存回收 UseParNewGC 打开此开关 ...
- RecyclerView高速通用适配Adapter
RecyclerView Adapter 为RecyclerView提供更简单的适配器实现方式,不断更新完好中. Demo视频演示 GitHub地址 博客 使用 BaseViewHolder 的使用 ...
- Docker + Jenkins 持续部署 ASP.NET Core 项目
Docker 是个好东西,特别是用它来部署 ASP.NET Core Web 项目的时候,但是仅仅的让程序运行起来远远不能满足我的需求,如果能够像 DaoCloud 提供的持续集成服务那样,检测 gi ...
- 在Azure Container Service创建Kubernetes(k8s)群集运行ASP.NET Core跨平台应用程序
引子 在此前的一篇文章中,我介绍了如何在本地docker环境中运行ASP.NET Core跨平台应用程序(http://www.cnblogs.com/chenxizhang/p/7148657.ht ...
- ASP.NET Core 使用 Alipay.AopSdk.Core 常见问题解答
1.Alipay.AopSdk.Core.AopException:"您使用的私钥格式错误,请检查RSA私钥配置,charset = UTF-8" 出现这个问题,就是配置不正确.首 ...
- iOS白名单设置
在做分享.支付的时候需要跳转到对应的app,这里有需要设置的白名单列表<key>LSApplicationQueriesSchemes</key> <array> ...
- 深入分析JavaWeb技术内幕(修订版)》【PDF】下载
<深入分析JavaWeb技术内幕(修订版)>[PDF]下载链接: https://u253469.pipipan.com/fs/253469-230062569 内容简介 <深入分析 ...