【机器学习】彻底搞懂CNN
之前通过各种博客视频学习CNN,总是对参数啊原理啊什么的懵懵懂懂。。这次上课终于弄明白了,O(∩_∩)O~
上世纪科学家们发现了几个视觉神经特点,视神经具有局部感受野,一整张图的识别由多个局部识别点构成;不同神经元对不同形状有识别能力,且视神经具有叠加能力,高层复杂的图案可以由低层简单线条组成。之后人们发现经过conclusional的操作,可以很好反映视神经处理计算的过程,典型的是1998年LeCun发明的LeNet-5,可以极大地提升识别效果。
本文主要就convolutional layer、pooling layer和整体CNN结构展开
一、Convolutional Layer卷积层
1、原理和参数
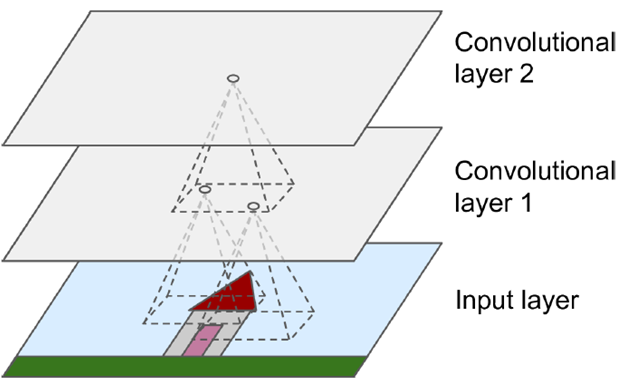
可以模拟局部感受野的性质,同上一层不是全连接,而是一小块区域连接,这一小块就是局部感受野(receptive field)。并且通过构造特定的卷积神经元,可以模拟不同神经元对不同形状刺激不同反应的性质。如下图所示,一个神经元处理一层会形成一个feature map,多层叠加,层数逐渐加深。
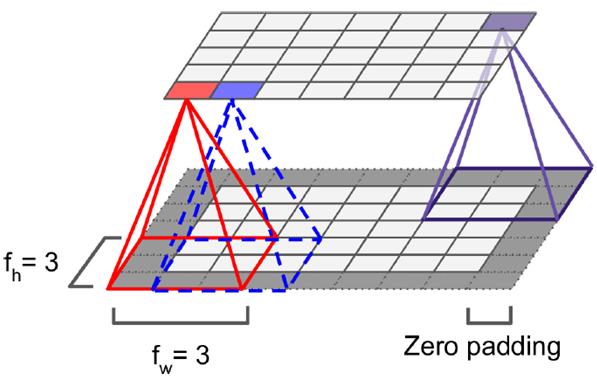
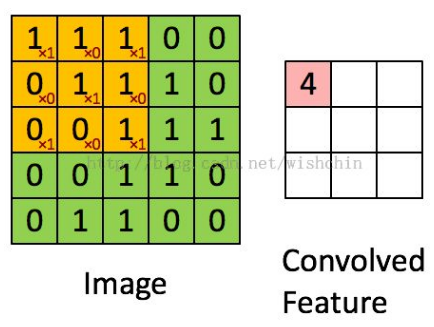
感受野(kernel或filter)的尺寸可以看做fh*fw,由于感受野本身具有尺寸,feature map会不断缩小,为了处理方便,使得每层大小不变,于是我们每层加值为0的边(zero padding),保证经过处理以后的feature map同前一层尺寸一样。多层之间的卷积运算操作,相当于和原来像素对应位置做乘法。如下左图所示,加了边后可以保证上下层大小一致,右图表示每层之间convolve的操作(如果不加zero padding)。
但上图所示只是简单例子,一般扫描的是三维图像(RGB),就不是一个矩阵,而是一个立方体,我们用一个三维块去扫描它,原理同上图相同。
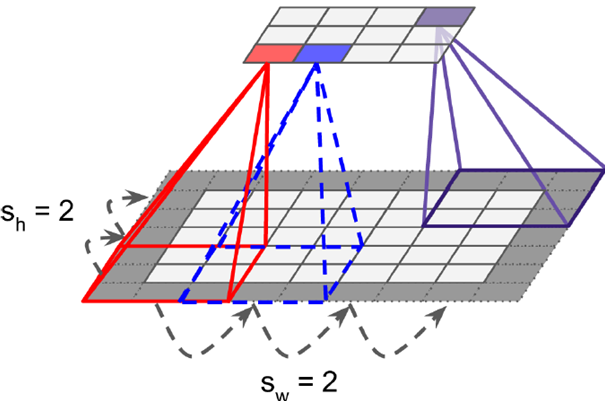
有时扫描时不是顺序去扫,而是跳跃着扫描,每次移动2-3个像素值(stride),但并非完全分离不会造成信息丢失,这样形成的feature map相较于原始图片缩小,实现信息聚集的效果。
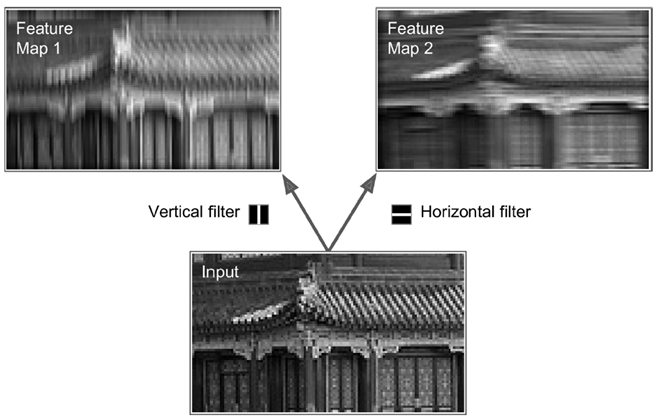
就像如下灰度图(2d)中所示,左边只提取竖线(vertical filter),右边只提取横线(horizontal filter)可看出横梁部分变亮,大量不同的这样的filter(比如可以识别边角、折线的filter)的叠加,可形成多张feature maps
下图是一个3d的RGB效果,每个kernel(filter)可以扫描出一张feature map,多个filter可以叠加出很厚的feature maps,前一层filter做卷积可以形成后一层的一个像素点
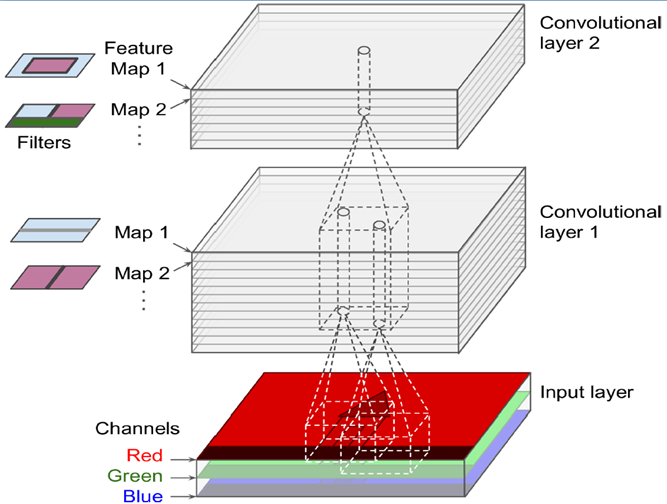
如下图,可以代表i行j列k深度的一个输出像素值,k’代表第k个filter,w代表filter中的值,x代表输入,b是偏值。

2、TensorFlow实现
以下是使用TensorFlow实现的代码,主要使用conv2d这个函数
import numpy as np
from sklearn.datasets import load_sample_images
# Load sample images
dataset = np.array(load_sample_images().images, dtype=np.float32)
# 一共4维,channel表示通道数,RGB是3
batch_size, height, width, channels = dataset.shape
# Create 2 filters
# 一般感受野大小7*7,5*5,3*3,设置2个kernel,输出2层feature map
filters_test = np.zeros(shape=(7, 7, channels, 2), dtype=np.float32)
# 第一个(0)filter的设定,7*7矩阵中,3是中间
filters_test[:, 3, :, 0] = 1 # vertical line
# 第二个(1)filter的设定
filters_test[3, :, :, 1] = 1 # horizontal line
# a graph with input X plus a convolutional layer applying the 2 filters
X = tf.placeholder(tf.float32, shape=(None, height, width, channels))
# 虽然输入是一个四维图像,但是由于batch_size和channel都已经固定,所以使用conv2d
# strides设定,第一个和第四个都是1表示不可以跳过batch_size和channel
# 那两个2表示横纵向都缩减2,相当于整张图片缩减为原来四分之一,做了75%的缩减
convolution = tf.nn.conv2d(X, filters, strides=[1,2,2,1], padding="SAME")
with tf.Session() as sess:
output = sess.run(convolution, feed_dict={X: dataset})
下面是padding的值SAME和VALID的区别(filter的宽度为6,stride为5),SAME确保所有图像信息都被convolve添加zero padding,而VALID只添加包含在内的像素点

3、所耗内存计算
相比于传统的全连接层,卷积层只是部分连接,节省了很多内存。
比如:一个具有5*5大小filter的卷积层,输出200张150*100大小的feature maps,stride取1(即不跳跃),padding为SAME。输入是150*100大小的RGB图像(channel=3),总共的参数个数是200*(5*5*3+1)=15200,其中+1是bias;如果输出采用32-bits float表示(np.float32),那么每张图片会占据200*150*100*32=9600000bits(11.4MB),如果一个training batch包含100张图片(mini-batch=100),那么这一层卷积层就会占据1GB的RAM。
可以看出,训练卷积神经网络是非常消耗内存的,但是使用时,只用到最后一层的输出即可。
二、Pooling Layer池化层
1、原理和参数
当图片大小很大时内存消耗巨大,而Pooling Layer所起的作用是浓缩效果,缓解内存压力。
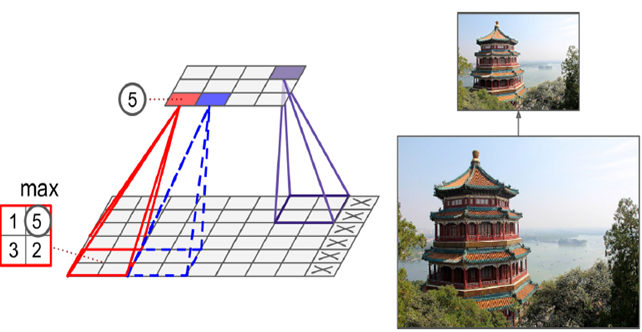
即选取一定大小区域,将该区域用一个代表元素表示。具体的Pooling有两种,取平均值(mean)和取最大值(max)。如下图所示是一个取最大值的pooling layer,kernel大小为2*2,stride大小取决于kernel大小,这里是2,即刚好使得所有kernel都不重叠的值,因而实现高效的信息压缩,将原始图像横纵压缩一半,如右图所示,特征基本都完全保留了下来。
pooling这个操作不影响channel数,在feature map上也一般不做操作(即z轴一般不变),只改变横纵大小。
2、TensorFlow实现
# Create a graph with input X plus a max pooling layer
X = tf.placeholder(tf.float32, shape=(None, height, width, channels))
# 选用取最大值的max_pool方法
# 如果是取平均值,这里是mean_pool
# ksize就是kernel大小,feature map和channel都是1,横向纵向是2
max_pool = tf.nn.max_pool(X, ksize=[1,2,2,1], strides=[1,2,2,1],padding="VALID") with tf.Session() as sess:
output = sess.run(max_pool, feed_dict={X: dataset})
三、整体CNN框架
典型CNN architecture
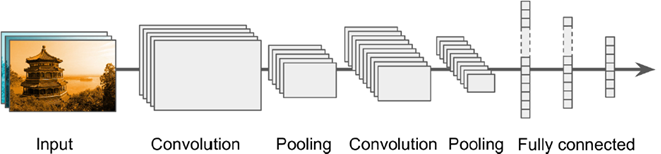
有名的CNN架构:
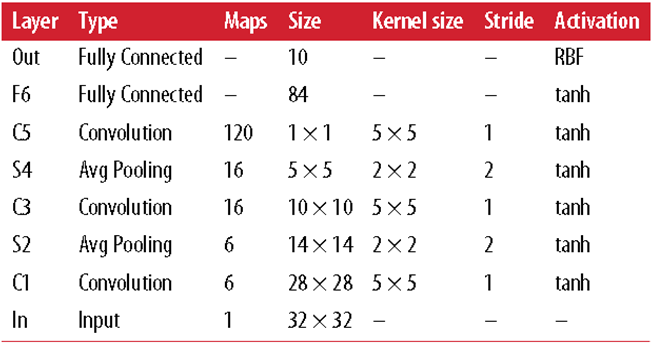
LeNet(MISIT上)-1998:输入32*32(在28*28图像上加了zero padding)。第一层kernel用了6个神经元,kernel大小5*5,stride取1,输出就是28*28;第二层做了average pooling,2*2的kernel,stride是2,输出就变为原来的一半,不改变feature map数目;第三层放了16个神经元,其他同理;第五层用了120个神经元,5*5的kernel对5*5的输入做卷积,没法再滑动,输出为1*1;F6用120个1*1的输出全连接84个神经元,Out全连接10个神经元,对应手写体识别输出的10个数字。
激活函数前面都用的tanh,是传统CNN中常用的,输出层用了RBF比较特殊,是一个计算距离的方式去判断和目标输出间距离做lost。。
AlexNet-2012:最早应用于竞赛中,近10%的提高了准确度
输入224*224的彩色图像,C1是个很大的11*11的filter,stride=4。。最后连做3层convolution。。最后输出1000个类的分类结果。
激活函数使用ReLU,这在现今很流行,输出层用的softmax

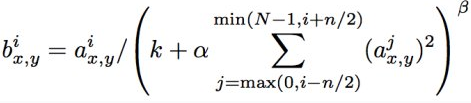
AlexNet使用了一个小技巧是Local Response Normalization(LRN局部响应归一化)
这种操作可以在传统输出上加一个bias,考虑到近邻的一些输出影响。即一个输出旁边有很牛掰的输出的话,它的输出就会怂了,收到抑制,可以看到,含β的整个项都在分母上。但后来发现,这个技术对分类器的提升也不是很明显,有的就没有用。
GoogleLeNet-2014:
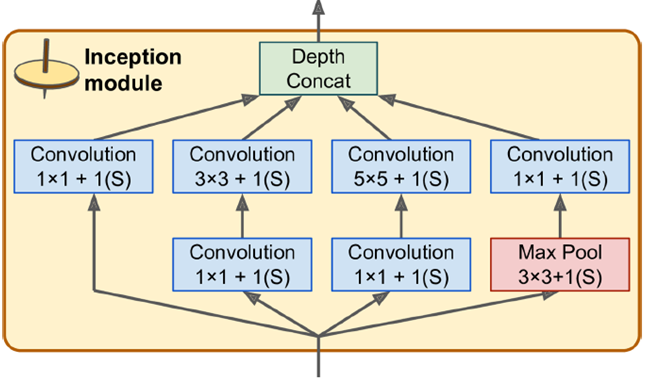
大量应用Inception module,一个输入进来,直接分四步进行处理,这四步处理完后深度直接进行叠加。在不同的尺度上对图片进行操作。大量运用1*1的convolution,可以灵活控制输出维度,可以降低参数数量。
如右图所示,输入是192,使用了9层inception module,如果直接用3*3,5*5参数,可以算一下,之后inception参数数目是非常大的,深度上可以调节,可以指定任意数目的feature map,通过增加深度把维度减下来。inception模块6个参数刚好对应这6个convolution,上面4个参数对应上面4个convolution,加入max pool不会改变feature map数目(如480=128+192+96+64)。
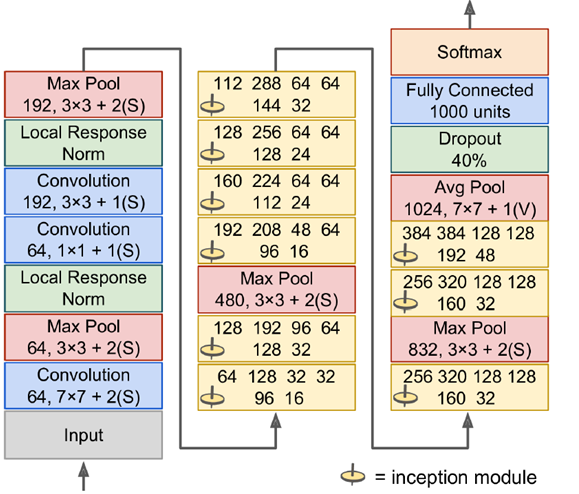
将正确率升高到95-96%,超过人类分辨率,因为image net中但是狗的种类就有很多,人类无法完全一一分辨出。
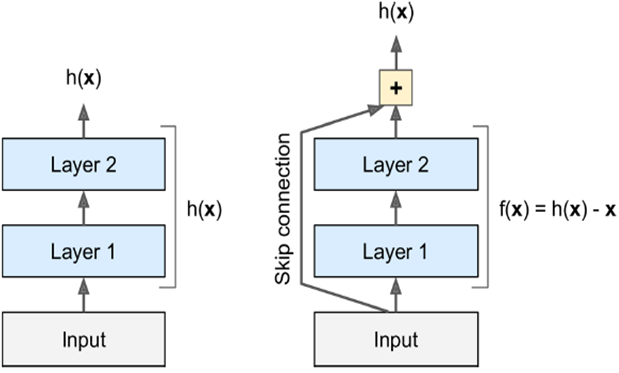
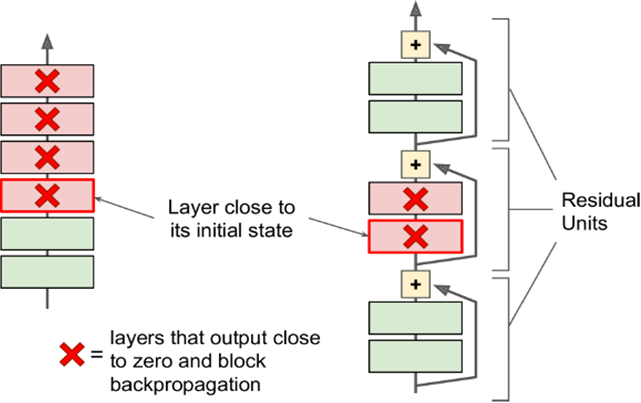
ReSNet残差网络-2015:
不再直接学习一个目标函数,输入直接跳过中间层直接连到输出上,要学习的是残差f(x),输入跳过中间层直接加到输出上。
好处是:深度模型路径依赖的限制,即gradient向前传导时要经过所有层,如果中间有层死掉了,前面的层就无法得到训练。残差网络不断跳跃,即使中间有的层已经死掉,信息仍旧能够有效流动,使得训练信号有效往回传导。
【机器学习】彻底搞懂CNN的更多相关文章
- 机器学习:让我们彻底搞懂CNN【转】
本文转载自:http://115.com/182920/T1266078.html 机器学习:让我们彻底搞懂CNN 上世纪科学家们发现了几个视觉神经特点,视神经具有局部感受眼,一整张图的识别由多个局部 ...
- 一天搞懂深度学习-训练深度神经网络(DNN)的要点
前言 这是<一天搞懂深度学习>的第二部分 一.选择合适的损失函数 典型的损失函数有平方误差损失函数和交叉熵损失函数. 交叉熵损失函数: 选择不同的损失函数会有不同的训练效果 二.mini- ...
- 彻底搞懂Javascript的“==”
本文转载自:@manxisuo的<通过一张简单的图,让你彻底地.永久地搞懂JS的==运算>. 大家知道,==是JavaScript中比较复杂的一个运算符.它的运算规则奇怪,容让人犯错,从而 ...
- 完全搞懂傅里叶变换和小波(2)——三个中值定理<转载>
书接上文,本文章是该系列的第二篇,按照总纲中给出的框架,本节介绍三个中值定理,包括它们的证明及几何意义.这三个中值定理是高等数学中非常基础的部分,如果读者对于高数的内容已经非常了解,大可跳过此部分.当 ...
- 完全搞懂傅里叶变换和小波(1)——总纲<转载>
无论是学习信号处理,还是做图像.音视频处理方面的研究,你永远避不开的一个内容,就是傅里叶变换和小波.但是这两个东西其实并不容易弄懂,或者说其实是非常抽象和晦涩的! 完全搞懂傅里叶变换和小波,你至少需要 ...
- 不想再被鄙视?那就看进来! 一文搞懂Python2字符编码
程序员都自视清高,觉得自己是创造者,经常鄙视不太懂技术的产品或者QA.可悲的是,程序员之间也相互鄙视,程序员的鄙视链流传甚广,作为一个Python程序员,自然最关心的是下面这幅图啦 我们项目组一值使用 ...
- 来一轮带注释的demo,彻底搞懂javascript中的replace函数
javascript这门语言一直就像一位带着面纱的美女,总是看不清,摸不透,一直专注服务器端,也从来没有特别重视过,直到最近几年,javascript越来越重要,越来越通用.最近和前端走的比较近,借此 ...
- java线程间通信:一个小Demo完全搞懂
版权声明:本文出自汪磊的博客,转载请务必注明出处. Java线程系列文章只是自己知识的总结梳理,都是最基础的玩意,已经掌握熟练的可以绕过. 一.从一个小Demo说起 上篇我们聊到了Java多线程的同步 ...
- for语句,你真正搞懂了吗?
今天看书时,无意间看到了这个知识点,啥知识点?也许在各位大神看来,那是再简单不过的东西了. 说来惭愧.原来直到今天我才真正搞懂for语句. for语句的结构如下所示: for(语句A;语句B;语句C) ...
随机推荐
- MySQL数据库主从复制实践
MySQL 主从(MySQL Replication),主要用于 MySQL 的实时备份.高可用HA.读写分离.在配置主从复制之前需要先准备 2 台 MySQL 服务器. 一.MySQL主从原 ...
- Java的绝对路径和相对路径
Java的绝对路径和相对路径 参考:http://blog.csdn.net/u011225629/article/details/46872775 1. 绝对路径 以根部件开始的路径是绝对路径,比如 ...
- LeetCode 381. Insert Delete GetRandom O(1) - Duplicates allowed (插入删除和获得随机数 常数时间 允许重复项)
Design a data structure that supports all following operations in average O(1) time. Note: Duplicate ...
- JF厂V8版本爱彼AP15703,黄家橡树离岸型,超越N厂神器
根据调查的结果JF厂的爱彼AP15703几乎常年垄断了爱彼的市场,销量持续性的排在爱彼整个品牌中的第一位.JF厂这两年一直在攻克爱彼整个品牌,有了解的都知道 爱彼15703以前是N厂的五大复刻神器的代 ...
- python 使用标准库根据进程名获取进程的pid
有时候需要获取进程的pid,但又无法使用第三方库的时候. 方法适用linux平台. 方法1 使用subprocess 的check_output函数执行pidof命令 from subprocess ...
- Myeclipse 2014破解教程
现在很多java编程软件人士大都使用MyEclipse,这软件的强大之处我就不说了,我说下安装步骤与破解步骤,若无JDK则先安装再配置环境变量,这个我就不讲了 工具/原料 MyEclipse安装包 ...
- windows查看端口占用命令
开始--运行--cmd 进入命令提示符 输入netstat -aon 即可看到所有连接的PID 之后在任务管理器中找到这个PID所对应的程序如果任务管理器中没有PID这一项,可以在任务管理器中选&qu ...
- webStorm恢复误删除文件或工程
背景: 提交git时可能由于没有提交所有文件,不知什么原因导致最近几天所写文件全部消失,所改文件全部恢复到以前.最终通过webstorm找回项目.下面总结通过webstorm找回误删文件,或恢复到历史 ...
- unlink()
unlink() 函数删除文件. 若成功,则返回 true,失败则返回 false. 语法 unlink(filename,context) 参数 描述 filename 必需.规定要删除的文件. c ...
- JAVA的继承,构造函数,窗体
import java.awt.*; import javax.swing.*; import javax.swing.JFrame; import java.awt.event.WindowList ...