Lasso回归的坐标下降法推导
目标函数
Lasso相当于带有L1正则化项的线性回归。先看下目标函数:RSS(w)+λ∥w∥1=∑Ni=0(yi−∑Dj=0wjhj(xi))2+λ∑Dj=0∣wj∣RSS(w)+λ∥w∥1=∑i=0N(yi−∑j=0Dwjhj(xi))2+λ∑j=0D∣wj∣ RSS(w)+\lambda \Vert w\Vert_1=\sum_{i=0}^{N}(y_i-\sum_{j=0}^D{w_jh_j(x_i)})^2+\lambda \sum_{j=0}^{D}|w_j| RSS(w)+λ∥w∥1=∑i=0N(yi−∑j=0Dwjhj(xi))2+λ∑j=0D∣wj∣
这个问题由于正则化项在零点处不可求导,所以使用非梯度下降法进行求解,如坐标下降法或最小角回归法。
坐标下降法
本文介绍坐标下降法。
坐标下降算法每次选择一个维度进行参数更新,维度的选择可以是随机的或者是按顺序。
当一轮更新结束后,更新步长的最大值少于预设阈值时,终止迭代。
下面分为两部求解
RSS偏导
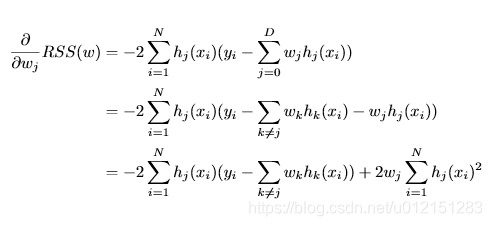
下面做一下标记化简
ρj=∑Ni=1hj(xi)(yi−∑k≠jwkhk(xi))ρj=∑i=1Nhj(xi)(yi−∑k≠jwkhk(xi)) \rho_j=\sum_{i=1}^Nh_j(x_i)(y_i-\sum_{k \neq j }w_kh_k(x_i))
ρj=∑i=1Nhj(xi)(yi−∑k̸=jwkhk(xi))
zj=∑Ni=1hj(xi)2zj=∑i=1Nhj(xi)2 z_j=\sum_{i=1}^N h_j(x_i)^2
zj=∑i=1Nhj(xi)2
上式化简为∂∂wjRSS(w)=−2ρj+2wjzj∂∂wjRSS(w)=−2ρj+2wjzj \frac{\partial}{\partial w_j}RSS(w)=-2\rho_j+2w_jz_j
∂wj∂RSS(w)=−2ρj+2wjzj
正则项偏导
次梯度方法(subgradient method)是传统的梯度下降方法的拓展,用来处理不可导的凸函数。
λ∂wj∣wj∣=⎧⎩⎨⎪⎪−λ[−λ,λ]λwj<0wj=0wj>0λ∂wj∣wj∣={−λwj<0[−λ,λ]wj=0λwj>0 \lambda \partial_{w_j}|w_j|=\begin{cases}-\lambda&w_j<0\\[-\lambda,\lambda]& w_j=0\\\lambda&w_j>0\end{cases}
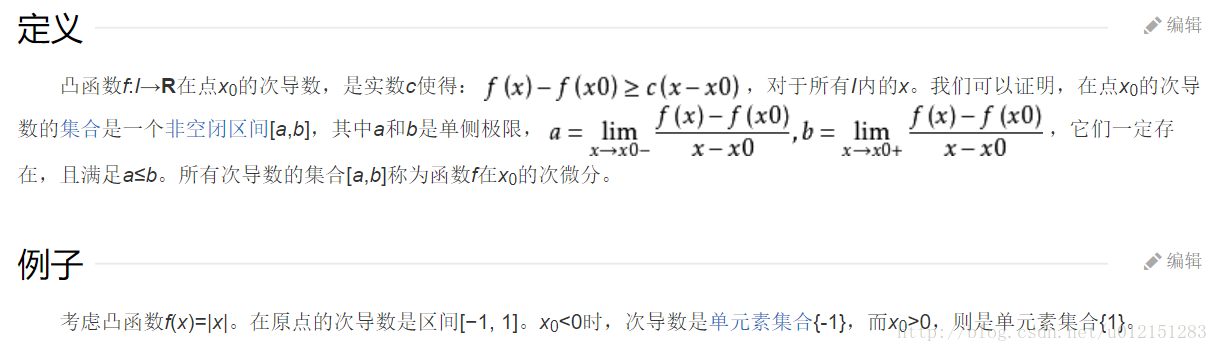
λ∂wj∣wj∣=⎩⎪⎨⎪⎧−λ[−λ,λ]λwj<0wj=0wj>0
整体偏导数
λ∂wj[lasso cost]=2zjwj−2ρj+⎧⎩⎨⎪⎪−λ[−λ,λ]λwj<0wj=0wj>0=⎧⎩⎨⎪⎪2zjwj−2ρj−λ[−2ρj−λ,−2ρj+λ]2zjwj−2ρj+λwj<0wj=0wj>0λ∂wj[lasso cost]=2zjwj−2ρj+{−λwj<0[−λ,λ]wj=0λwj>0={2zjwj−2ρj−λwj<0[−2ρj−λ,−2ρj+λ]wj=02zjwj−2ρj+λwj>0 \lambda \partial_{w_j}\text{[lasso cost]}= 2z_jw_j-2\rho_j+\begin{cases}-\lambda&w_j<0\\[-\lambda,\lambda]& w_j=0\\\lambda&w_j>0\end{cases}\\=\begin{cases}2z_jw_j-2\rho_j-\lambda&w_j<0\\[-2\rho_j-\lambda,-2\rho_j+\lambda]& w_j=0\\2z_jw_j-2\rho_j+\lambda&w_j>0\end{cases}
λ∂wj[lasso cost]=2zjwj−2ρj+⎩⎪⎨⎪⎧−λ[−λ,λ]λwj<0wj=0wj>0=⎩⎪⎨⎪⎧2zjwj−2ρj−λ[−2ρj−λ,−2ρj+λ]2zjwj−2ρj+λwj<0wj=0wj>0
要想获得最有解,令
λ∂wj[lasso cost]=0λ∂wj[lasso cost]=0 \lambda \partial_{w_j}\text{[lasso cost]}=0
λ∂wj[lasso cost]=0。
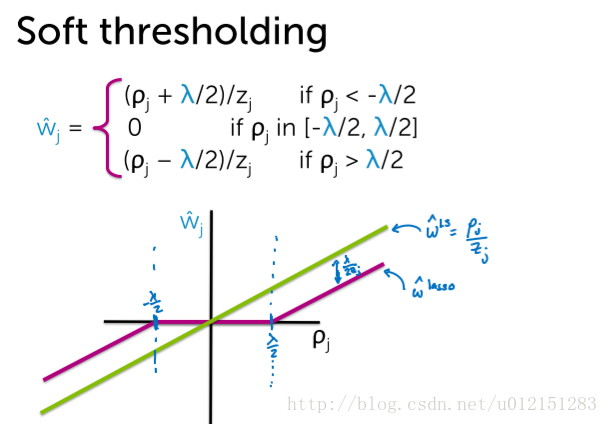
解得,
wˆj=⎧⎩⎨⎪⎪(ρj+λ/2)/zj0(ρj−λ/2)/zjρj<−λ/2ρj in [−λ/2,λ/2]ρj>λ/2w^j={(ρj+λ/2)/zjρj<−λ/20ρj in [−λ/2,λ/2](ρj−λ/2)/zjρj>λ/2 \hat w_j= \begin{cases}(\rho_j+\lambda/2)/z_j&\rho_j<-\lambda/2\\0& \rho_j\text{ in }[-\lambda/2,\lambda/2]\\(\rho_j-\lambda/2)/z_j&\rho_j>\lambda/2\end{cases}
w^j=⎩⎪⎨⎪⎧(ρj+λ/2)/zj0(ρj−λ/2)/zjρj<−λ/2ρj in [−λ/2,λ/2]ρj>λ/2
伪代码
预计算zj=∑Ni=1hj(xi)2zj=∑i=1Nhj(xi)2 z_j=\sum_{i=1}^N h_j(x_i)^2
zj=∑i=1Nhj(xi)2
初始化参数w(全0或随机)
循环直到收敛:
for j = 0,1,…D
$ \space \space\space\space\rho_j=\sum_{i=1}^Nh_j(x_i)(y_i-\sum_{k \neq j }w_kh_k(x_i))$
update wj update wj \space \space\space\space update\space w_jupdate wj
选择变化幅度最大的维度进行更新
概率解释
拉普拉斯分布
随机变量X∼Laplace(μ,b)X∼Laplace(μ,b) X\sim Laplace(\mu,b)
X∼Laplace(μ,b),其中μμ \mu
μ是位置参数,b>0b>0 b>0
b>0是尺度参数。
概率密度函数为
f(x∣μ,b)=12bexp(−∣x−μ∣b)f(x∣μ,b)=12bexp(−∣x−μ∣b) f(x|\mu,b)=\frac{1}{2b}exp(-\frac{|x-\mu|}{b})
f(x∣μ,b)=2b1exp(−b∣x−μ∣)
MAP推导
假设ϵi∼N(0,σ2)ϵi∼N(0,σ2) \epsilon_i\sim N(0,\sigma^2)
ϵi∼N(0,σ2),wi∼Laplace(0,1λ)wi∼Laplace(0,1λ) w_i\sim Laplace(0,\frac{1}{\lambda})
wi∼Laplace(0,λ1)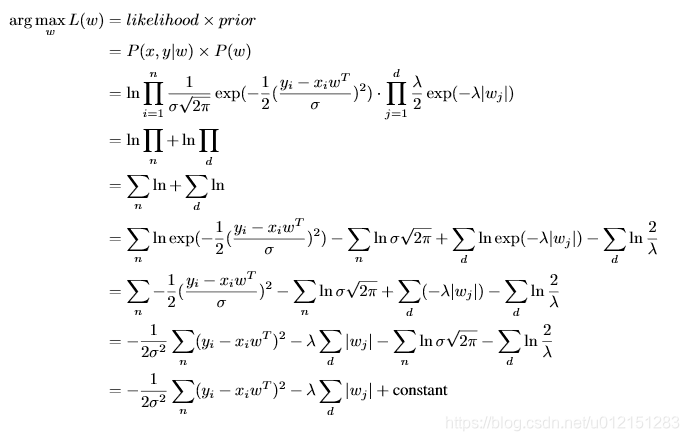
等价于
Lasso回归的坐标下降法推导的更多相关文章
- 坐标下降法(coordinate descent method)求解LASSO的推导
坐标下降法(coordinate descent method)求解LASSO推导 LASSO在尖点是singular的,因此传统的梯度下降法.牛顿法等无法使用.常用的求解算法有最小角回归法.coor ...
- Lasso回归算法: 坐标轴下降法与最小角回归法小结
前面的文章对线性回归做了一个小结,文章在这: 线性回归原理小结.里面对线程回归的正则化也做了一个初步的介绍.提到了线程回归的L2正则化-Ridge回归,以及线程回归的L1正则化-Lasso回归.但是对 ...
- 线性回归大结局(岭(Ridge)、 Lasso回归原理、公式推导),你想要的这里都有
本文已参与「新人创作礼」活动,一起开启掘金创作之路. 线性模型简介 所谓线性模型就是通过数据的线性组合来拟合一个数据,比如对于一个数据 \(X\) \[X = (x_1, x_2, x_3, ..., ...
- 通俗易懂--岭回归(L2)、lasso回归(L1)、ElasticNet讲解(算法+案例)
1.L2正则化(岭回归) 1.1问题 想要理解什么是正则化,首先我们先来了解上图的方程式.当训练的特征和数据很少时,往往会造成欠拟合的情况,对应的是左边的坐标:而我们想要达到的目的往往是中间的坐标,适 ...
- 岭回归和lasso回归(转)
回归和分类是机器学习算法所要解决的两个主要问题.分类大家都知道,模型的输出值是离散值,对应着相应的类别,通常的简单分类问题模型输出值是二值的,也就是二分类问题.但是回归就稍微复杂一些,回归模型的输出值 ...
- Lasso回归
Lasso 是一个线性模型,它给出的模型具有稀疏的系数(sparse coefficients).它在一些场景中是很有用的,因为它倾向于使用较少参数的情况,能够有效减少给定解决方案所依赖变量的个数.因 ...
- 【机器学习】正则化的线性回归 —— 岭回归与Lasso回归
注:正则化是用来防止过拟合的方法.在最开始学习机器学习的课程时,只是觉得这个方法就像某种魔法一样非常神奇的改变了模型的参数.但是一直也无法对其基本原理有一个透彻.直观的理解.直到最近再次接触到这个概念 ...
- 岭回归&Lasso回归
转自:https://blog.csdn.net/dang_boy/article/details/78504258 https://www.cnblogs.com/Belter/p/8536939. ...
- 线性回归——lasso回归和岭回归(ridge regression)
目录 线性回归--最小二乘 Lasso回归和岭回归 为什么 lasso 更容易使部分权重变为 0 而 ridge 不行? References 线性回归很简单,用线性函数拟合数据,用 mean squ ...
随机推荐
- ChibiOS/RT移植到STM32F407
官网地址:http://www.chibios.org/dokuwiki/doku.php 下载源码 找到STM32F407的demos程序(chibios\demos\STM32\RT-STM32F ...
- phpstom激活
phpstom官网:https://www.jetbrains.com/phpstorm/download 激活方法:激活时选择License server 填入http://idea.imsxm.c ...
- iOS testflight 使用说明
一.告知开发者苹果手机的账户邮箱 1.通过任何形式告知即可 2.下载testflight 二.开发者发送激活邮件到测试者的账户邮箱 1.进入邮箱查看邮件点击 Accept invitation 进行下 ...
- awk 概述及常用方法总结
awk 简介 awk是一个文本处理工具,通常用于处理数据并生成结果报告, awk的命名是它的创始人 Alfred Aho.Peter Weinberger和Brian Kernighan 姓氏的首个字 ...
- 解决 React Native:The development server returned response error code: 404
解决方法: 打开android/app/build.gradle compile 'com.facebook.react:react-native:+' 修改为: compile ("com ...
- python之csv操作
在使用python爬虫时或者其他情况,都会用到csv存储与读取的相关操作,我们在这里就浅谈一下: CSV(Comma-Separated Values)逗号分隔符,也就是每条记录中的值与值之间是用分号 ...
- [dev][ipsec][distributed] strongswan如何做热迁移/高可用/High Availability
问题描述: 原生的基于kernel 的 strongswan 如何做高可用,HA,High Availability 问题分析: 基于我们已知的,ipsec,strongswan的知识.问题分解如下: ...
- git管理分支某公司的流程
- Docker那些事儿之镜像创建
之前已经了解了docker的基本使用方式,简单的上手,也能让大部分人了解到这个技术的使用方法,今天继续说明docker如何构建自己所需要的镜像,开发人员掌握使用基础即可,有兴趣的可以自行深入研究 前言 ...
- TODO: Android UI测试 UIAutomator
前几天跑了一下UIAutomator的demo,忘记写下来了...真的日,有点忘了都. 待填坑