PCL—关键点检测(NARF)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5051533.html
关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别、寻物联系在一起。关键点检测可以说是通往高层次视觉的重要基础。但本章节仅在低层次视觉上讨论点云处理问题,故所有讨论都在关键点检测上点到为止。NARF 算法实际上可以分成两个部分,第一个部分是关键点提取,第二个部分是关键点信息描述,本文仅涉及第一个部分。
在文章开始之前,有非常重要的一点要说明,点云中任意一点,都有一定概率作为关键点。关键点也是来自原始点云中的一个元素。和图像的边缘提取或者关键点检测算法追求n次插值,最终求的亚像素坐标不同,点云的关键点只在乎找到那个点。
1. 边缘提取
首先声明本文所有思想算法公式均来自:Point Feature Extraction on 3D Range Scans Taking into Account Object Boundaries
在正式开始关键点提取之前,有必要先进行边缘提取。原因是相对于其他点,边缘上的点更有可能是关键点。和图像的边缘不同(灰度明显变化),点云的边缘有更明确的物理意义。对点云而言,场景的边缘代表前景物体和背景物体的分界线。所以,点云的边缘又分为三种:前景边缘,背景边缘,阴影边缘。
rangeImage 是一个天然适合用于边缘提取的框架。在这里需要做一些假设:每个rangeImage像素中假设都只有一个点(显然在生成rangeImage的时候点云是被压缩了的,压缩了多少和rangeImage的分辨率有关,分辨率不能太小,否则rangeImage上会有"洞”,分辨率太大则丢失很多信息)。
三维点云的边缘有个很重要的特征,就是点a 和点b 如果在 rangImage 上是相邻的,然而在三维距离上却很远,那么多半这里就有边缘。由于三维点云的规模和稀疏性,“很远”这个概念很难描述清楚。到底多远算远?这里引入一个横向的比较是合适的。这种比较方法可以自适应点云的稀疏性。所谓的横向比较就是和 某点周围的点相比较。 这个周围有多大?不管多大,反正就是在某点pi的rangeImage 上取一个方窗。假设像素边长为s. 那么一共就取了s^2个点。接下来分三种情况来讨论所谓的边缘:
1.这个点在某个平面上,边长为 s 的方窗没有涉及到边缘
2.这个点恰好在某条边缘上,边长 s 的方窗一半在边缘左边,一半在右边
3.这个点恰好处于某个角点上,边长 s 的方窗可能只有 1/4 与 pi 处于同一个平面
如果将 pi 与不同点距离进行排序,得到一系列的距离,d0 表示与 pi 距离最近的点,显然是 pi 自己。 ds^2 是与pi 最远的点,这就有可能是跨越边缘的点了。 选择一个dm,作为与m同平面,但距离最远的点。也就是说,如果d0~ds^2是一个连续递增的数列,那么dm可以取平均值。如果这个数列存在某个阶跃跳动(可能会形成类似阶跃信号)那么则发生阶跃的地方应该是有边缘存在,不妨取阶跃点为dm(距离较小的按个阶跃点)原文并未如此表述此段落,原文取s=5, m=9 作为m点的一个合理估计。
对任意一个点,进行打分,来判断该点作为边缘点有多大可能性。首先,边缘可能会在某点的:上,下,左,右四个方向。
所以只要把pi 和 pi 右边的点求相对距离。 并把这个相对距离和dm进行比较,就可以判断边缘是不是在该点右边。如果距离远大于dm,显然该点右边的邻点就和pi不是同一个平面了。
为了增加对噪声的适应能力,取右边的点为右边几个点的平均数。接下来依据此信息对该点进行打分。
其中deta 就是dm. dright = || pi pright ||.
最后再取大于0.8的Sright,并进行非极大值抑制。就可以得到物体的边缘了
2. 关键点提取
在提取关键点时,边缘应该作为一个重要的参考依据。但一定不是唯一的依据。对于某个物体来说关键点应该是表达了某些特征的点,而不仅仅是边缘点。所以在设计关键点提取算法时,需要考虑到以下一些因素:
i) it must take information about borders and the surface structure into account;
边缘和曲面结构都要考虑进去
ii) it must select positions that can be reliably detected even if the object is observed from another perspective;
关键点要能重复
iii) the points must be on positions that provide stable areas for normal estimation or the descriptor calculation in general.
关键点最好落在比较稳定的区域,方便提取法线
对于点云构成的曲面而言,某处的曲率无疑是一个非常重要的结构描述因素。某点的曲率越大,则该点处曲面变化越剧烈。在2D rangeImage 上,去 pi 点及其周边与之距离小于2deta的点,进行PCA主成分分析。可以得到一个 主方向v,以及曲率值 lamda. 注意, v 必然是一个三维向量。那么对于边缘点,可以取其 权重 w 为1 , v 为边缘方向。对于其他点,取权重 w 为 1-(1-lamda)^3 , 方向为 v 在平面 p上的投影。 平面 p 垂直于 pi 与原点连线。到此位置,每个点都有了两个量,一个权重,一个方向。将权重与方向带入下列式子 I 就是某点 为特征点的可能性。
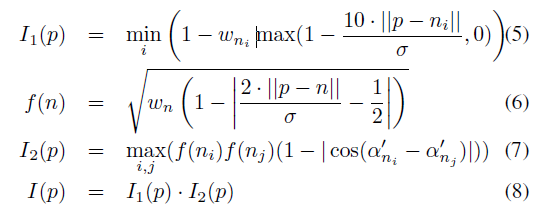
最后进行极大值抑制,就可以得到一些特征点了。
3. 关于特征点提取的一些思考
在我看来,本文提出的算法效果上可能确实不错,但是这算法里面太多经验值与神秘数。各种式子没有明确的物理意义,只是单纯为了获得一个较好的结果设计出来 "打分"的。 这种算法实在谈不上优雅,当然,我连这种不优雅的算法也设计不出来。。。。。。。
点云的特征点提取应该与后面的特征描述是松耦合的。确实不得不承认,针对不同的点云:稀疏的,致密的,有序的,无序的,有遮挡的,高精测量的.......设计不同的关键点提取算法也无可厚非。总结出的关键点提取算法原则就是要尺度不变,鲁棒性好,至于是否一定要存在于平坦区域,我觉得并不一定。不同的关键点提取算法可以和不同的特征描述算法进行组合,最终得到一个较好的效果。如果非要把关键点提取算法和特征描述算法紧耦合,那势必会失去一部分灵活性。
最后还有一点想要吐槽的是,点云中的点为什么不应该自带是否是关键点的性质,而需要我们来进行检测?这显然不符合面向对象的设计原则........我觉的应该有某种点云采集方法,得到的点云可以有以下性质:point.is_key_point = 1/0.
这多好~ -_-笑死
PCL—关键点检测(NARF)低层次点云处理的更多相关文章
- PCL—关键点检测(rangeImage)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5046479.html 关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的 ...
- PCL—关键点检测(iss&Trajkovic)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5069311.html 关键点检测往往需要和特征提取联合在一起,关键点检测的一个重要性质就是旋转不变性,也就是说,物 ...
- PCL—点云分割(邻近信息) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5000147.html 分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最 ...
- PCL—关键点检测(Harris)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5064848.html 除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更 ...
- PCL—点云分割(基于凹凸性) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5027269.html 1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割 ...
- PCL—点云分割(超体聚类) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5013968.html 1.超体聚类——一种来自图像的分割方法 超体(supervoxel)是一种集合,集合的元素是 ...
- PCL—点云滤波(基于点云频率) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5010771.html 1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概 ...
- PCL—点云分割(最小割算法) 低层次点云处理
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- PCL—点云分割(RanSaC)低层次点云处理
博客转载自:http://blog.csdn.net/app_12062011/article/details/78131318 点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势 ...
随机推荐
- 剑指offer--13.二进制中1的个数
就是猜测试数据没有负数,哈哈 ----------------------------------------------------------------- 时间限制:1秒 空间限制:32768K ...
- stencil in unity3d
Pass { Stencil { Ref Comp Always Pass REPLACE } AlphaTest Greater Blend SrcAlpha OneMinusSrcAlpha Co ...
- pthread_cond_wait() 前使用 while 讲解
pthread_cond_wait() 前使用 while 讲解 -- : LINUX环境下多线程编程肯定会遇到需要条件变量的情况,此时必然要使用pthread_cond_wait()函数.但这个函数 ...
- UDP打洞原理及代码
来源:http://www.fenbi360.net/Content.aspx?id=1021&t=jc UDP"打洞"原理 1. NAT分类 根据Stun协议 ...
- jira python操作,自动创建问题
jira web api地址 http://jira.**.com/plugins/servlet/restbrowser http://jira.**.com/rest/api/2/issue/cr ...
- C# 多线程参数传递
之前使用多线程的时候,基本没有遇到过参数传递的情况,最近,接连遇到需要进行参数传递的多线程的使用.每次都要重新上网查一下,太麻烦了.为了方便以后的使用,就把经常参阅的网上资料记录下来. 原文地址如下: ...
- Java-API:java.io百科
ylbtech-Java-API:java.io百科 Java的核心库java.io提供了全面的IO接口.包括:文件读写.标准设备输出等.Java中IO是以流为基础进行输入输出的,所有数据被串行化写入 ...
- HTTP-Runoob:HTPP Content-Type
ylbtech-HTTP-Runoob:HTPP Content-Type 1.返回顶部 1. HTTP content-type Content-Type,内容类型,一般是指网页中存在的Conten ...
- vue-cli脚手架build目录中的webpack.dev.conf.js配置文件
此文章用来解释vue-cli脚手架build目录中的webpack.dev.conf.js配置文件 此配置文件是vue开发环境的wepack相关配置文件 关于注释 当涉及到较复杂的解释我将通过标识的方 ...
- python 函数和方法的区别
一.函数和方法的区别 1.函数要手动传self,方法不用传 2.如果是一个函数,用类名去调用,如果是一个额方法,用对象去调用 举例说明: class Foo(object): def __init__ ...