AABB碰撞盒
矩形边界框(转)
另一种常见的用来界定物体的几何图元是矩形边界框,矩形边界框可以是与轴对齐的或是任意方向的。轴对齐矩形边界框有一个限制,就是它的边必须垂直于坐标轴。缩写AABB常用来表示axially aligned bounding box(轴对齐矩形边界框),OBBoriented bounding box(方向矩形边界框)。轴对齐矩形边界框不仅容易创建,而且易于使用。
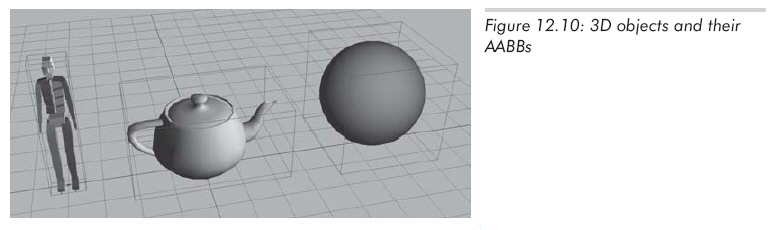
一个3D的AABB就是一个简单的六面体,每一边都平行于一个坐标平面。矩形边界框不一定是立方体,它的长、宽、高可以彼此不同。在图12.10中,画出了一些简单的3D物体和它们的AABB
AABB的表达方法
先介绍AABB的一些重要性质和引用这些值时所用到的记法。AABB内的点满足下列等式:
xmin x xmax
ymin y ymax
zmin z zmax
特别重要的两个点为:
pmin = [xmin ymin zmin ]
pmax = [xmax ymax zmax ]
中心点c为:
c = (pmin + pmax) /2
""spminpmax的向量,包含了矩形边界的长、宽、高:
s = pmax - pmin
还可以求出矩形边界框的""r,它是从中心指向pmax的向量:
r = pmax - c = s/2
明确地定义一个AABB只需要pmin、pmaxcsr这5个向量中的两个(除sr不能配对外,它们中的任意两个都可配对)。在一些情况下,某些配对形式比其他的会更有用。我们建议用pmin和pmax表示一个边界框,因为实际应用中,使用它们的频率远高于csr。当然,由pmin和pmax计算其余三个中的任意一个都是很容易的。
在我们的C++代码中,使用下面的类表示AABB,这是一个缩略的代码清单。
#define AABB3_H
#include "vector3.h"
class cMatrix4x3;
//---------------------------------------------------------------------------
// Implement a 3D axially aligned bounding box
//---------------------------------------------------------------------------
class cAABB3
{
public:
cVector3 min, max;
public// query for dimentions
cVector3 size() constreturn max - min; }
float x_size() { return max.x - min.x; }
float y_size() { return max.y - min.y; }
float z_size() { return max.z - min.z; }
cVector3 center() constreturn (min + max) * 0.5f; }
// fetch one of the eight corner points
cVector3 corner(const// "Empty" the box, by setting the values to really large/small numbers.
empty();
// add a point to the box
const cVector3& p);
// add an AABB to the box
const cAABB3& box);
// return true if the box is empty
is_empty() const// return true if the box contains a point
contains(const cVector3& p) const// transform the box and compute the new AABB
set_to_transformed_box(const cAABB3& box, const cMatrix4x3& m);
// return the clostet point on this box to another point
cVector3 clostet_point_to(const cVector3& p) const#endif
计算AABB
计算一个顶点集合的AABB是非常简单的,先将最小值和最大值设为"正负无穷大"或任何比实际中用到的数都大或小得多的数。接着,遍历全部点,并扩展边界框直到它包含所有点为止。
我们在cAABB类中引入了两个辅助函数,第一个函数负责""AABB
// "Empty" the box, by setting the values to really large/small numbers.
//---------------------------------------------------------------------------
cAABB3::empty()
{
constfloat big_number = 1e37f;
min.x = min.y = min.z = big_number;
max.x = max.y = max.z = -big_number;
}
第二个函数将单个点""到AABB中,并在必要的时候扩展AABB以包含每个点:
// Add a point to the box
//---------------------------------------------------------------------------
cAABB3::add(const cVector3& p)
{
// expand the box as necessary to contain the point
(p.x < min.x) min.x = p.x;
(p.x > max.x) max.x = p.x;
(p.y < min.y) min.y = p.y;
(p.y > max.y) max.y = p.y;
(p.z < min.z) min.z = p.z;
(p.z > max.z) max.z = p.z;
}
现在,从一个点集创建矩形边界框,可以使用下面的代码:
// Our list of points
const n;
Vector3 list[n];
// First, empty the box
AABB3 box;
box.empty();
// Add each point into the box
i = 0 ; i < n ; ++i)
box.add(list[i]);
取得AABB的顶点:
// Return one of the 8 corner points. The points are numbered as follows:
//
// 6 7
// ------------------------------
// /| /|
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// 2 / | 3 / |
// /----------------------------/ |
// | | | |
// | | | | +Y
// | 4 | | |
// | |-----------------|----------| |
// | / | / 5 |
// | / | / | +Z
// | / | / |
// | / | / | /
// | / | / | /
// | / | / | /
// | / | / | /
// | / | / | /
// | / | / |/
// |/ |/ ----------------- +X
// ------------------------------
// 0 1
//
// Bit 0 selects min.x vs. max.x
// Bit 1 selects min.y vs. max.y
// Bit 2 selects min.z vs. max.z
//--------------------------------------------------------------------------------------
cVector3 cAABB3::corner(const
{
assert(i >= 0 && i <= 7); // make sure index is in range
return cVector3((i & 1) ? max.x : min.x,
(i & 2) ? max.y : min.y,
(i & 4) ? max.z : min.z);
}
其他的相关函数,具体功能详见注释:
// Add an AABB to the box
//---------------------------------------------------------------------------
cAABB3::add(const cAABB3& box)
{
// expand the box as necessary
(box.min.x < min.x) min.x = box.min.x;
(box.min.x > max.x) max.x = box.min.x;
(box.min.y < min.y) min.y = box.min.y;
(box.min.y > max.y) max.y = box.min.y;
(box.min.z < min.z) min.z = box.min.z;
(box.min.z > max.z) max.z = box.min.z;
}
//---------------------------------------------------------------------------
// Return true if the box is empty
//---------------------------------------------------------------------------
cAABB3::is_empty() const// check if we're inverted on any axis
return (min.x > max.x) || (min.y > max.y) || (min.z > max.z);
}
//---------------------------------------------------------------------------
// Return true if the box contains a point
//---------------------------------------------------------------------------
cAABB3::contains(const cVector3& p) const// check for overlap on each axis
return (p.x >= min.x) && (p.x <= max.x) &&
(p.y >= min.y) && (p.y <= max.y) &&
(p.z >= min.z) && (p.z <= max.z);
}
//---------------------------------------------------------------------------
// return the closest point on this box to another point
//---------------------------------------------------------------------------
cVector3 cAABB3::clostet_point_to(const cVector3& p) const// "push" p into the box, on each dimension.
cVector3 r;
(p.x < min.x)
r.x = min.x;
(p.x > max.x)
r.x = max.x;
r.x = p.x;
(p.y < min.y)
r.y = min.y;
(p.y > max.y)
r.y = max.y;
r.y = p.y;
(p.z < min.z)
r.z = min.z;
(p.z > max.z)
r.z = max.z;
r.z = p.z;
return
AABB
很多情况下,AABB比边界球更适合于做定界球:
(1)计算一个点集的AABB,在编程上更容易实现,并能在较短的时间内完成。计算边界球则困难得多。
(2)对实际世界里的许多物体,AABB提供了一种""的边界。当然,对于某些物体,边界球更好(设想一个本身就是球形的物体)。在极端情况下,AABB的体积可能仅相当于边界球体积的1/2,大部分时候边界球的体积会比矩形框的体积大得多,比较一下电线杆的边界球和AABB就知道了。图12.11所示为不同物体的AABB与边界球的比较。
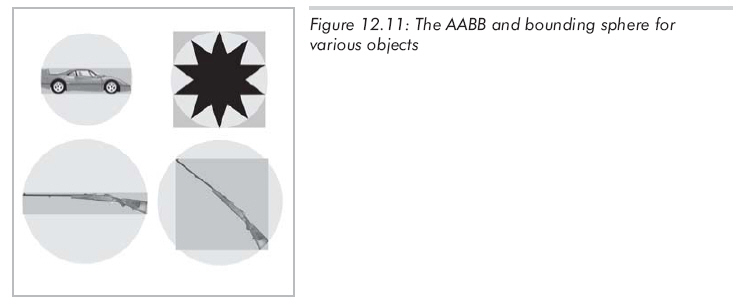
边界球的根本问题是它的形状只有一个自由度----半径,而AABB却有三个自由度----长、宽、高。因此,它可以调节这些自由度以适应不同物体。对图12.11中的大部分物体,除了右上角的星形体外,AABB都比边界球小。对这颗星,边界球也仅比AABB略小一些。通过图12.11,我们可以注意到AABB对物体的方向很敏感。比较下面两支枪的AABB,图中枪的大小都是相同的,只是方向不同而已;还应注意到在这一情况下边界球大小相同,因为边界球对物体方向不敏感。
变换AABB
当物体在虚拟世界中移动时,它的AABB也需要随之移动。此时我们有两个选择----用变换后的物体来重新计算AABB,或者对AABB做和物体同样的变换。所得到的结果不一定是轴对齐的(如果物体旋转),也不一定是盒状的(如果物体发生了扭曲)。不过,通过"变换后的AABB"进行计算要比通过"经过变换后的物体"计算AABB快得多,因为AABB只有8个顶点。
通过"变换后的AABB"计算不能只是简单地变换8个顶点,也不能通过转换原pminpmax来得到新的pminpmax ----这样可能会导致xin > xmax。为了计算新的AABB,必须先变换8个顶点,再从这8个顶点中计算一个新的AABB。
根据变换的不同,这种方法可能使新边界框比原边界框大许多。例如,在2D中,45度的旋转会大大增加边界框的尺寸,如图12.12
比较图12.12中原AABB(灰色框)和新AABB(右边较大的方框),它是通过旋转后的AABB计算的,新AABB几乎是原来的两倍。注意,如果从旋转后的物体而不是通过旋转后的AABB来计算新AABB,它的大小将和原来的AABB相同。
可以利用AABB的结构来加快新的AABB的计算速度,而不必先变换8个顶点,再从这8个顶点中计算新AABB。
让我们简单回顾一下3x3矩阵变换一个3D点的过程:
设原边界框为xminmaxymin...,新边界框计算将得到x'minx'maxy'min...。现在我们的任务就是想办法加快计算x'min的速度,换句话说,我们希望找到m11x+m21y+m31z的最小值,其中[x, y, z]是原8个顶点中的任意一个,我们所要做的就是找出这些点经过变换后谁的x坐标最小。看第一个乘积:m11x,为了最小化乘积,必须决定是用xminmax来代换其中的x。显然,如果m11>0xmin能得到最小化乘积;如果m11<0xmax能得到最小化乘积。比较方便的是,不管xminxmax中哪个被用来计算xmin,都可以用另外一个来计算xmax。可以对矩阵9个元素中的每个都应用这个计算过程,如下列代码所示:
// Transform the box and compute the new AABB. Remember, this always
// results in an AABB that is at least as big as the origin, and may be
// considerably bigger.
//---------------------------------------------------------------------------
cAABB3::set_to_transformed_box(const cAABB3& box, const cMatrix4x3& m)
{
// if we're empty, then bail.
(box.is_empty())
{
empty();
return// start with the translation portion
min = max = get_translation(m);
// examine each of the 9 matrix elements and compute the new AABB
(m.m11 > 0.0f)
{
min.x += m.m11 * box.min.x;
max.x += m.m11 * box.max.x;
}
{
min.x += m.m11 * box.max.x;
max.x += m.m11 * box.min.x;
}
(m.m21 > 0.0f)
{
min.x += m.m21 * box.min.y;
max.x += m.m21 * box.max.y;
}
{
min.x += m.m21 * box.max.y;
max.x += m.m21 * box.min.y;
}
(m.m31 > 0.0f)
{
min.x += m.m31 * box.min.z;
max.x += m.m31 * box.max.z;
}
{
min.x += m.m31 * box.max.z;
max.x += m.m31 * box.min.z;
}
(m.m12 > 0.0f)
{
min.y += m.m12 * box.min.x;
max.y += m.m12 * box.max.x;
}
{
min.y += m.m12 * box.max.x;
max.y += m.m12 * box.min.x;
}
(m.m22 > 0.0f)
{
min.y += m.m22 * box.min.y;
max.y += m.m22 * box.max.y;
}
{
min.y += m.m22 * box.max.y;
max.y += m.m22 * box.min.y;
}
(m.m32 > 0.0f)
{
min.y += m.m32 * box.min.z;
max.y += m.m32 * box.max.z;
}
{
min.y += m.m32 * box.max.z;
max.y += m.m32 * box.min.z;
}
(m.m13 > 0.0f)
{
min.z += m.m13 * box.min.x;
max.z += m.m13 * box.max.x;
}
{
min.z += m.m13 * box.max.x;
max.z += m.m13 * box.min.x;
}
(m.m23 > 0.0f)
{
min.z += m.m23 * box.min.y;
max.z += m.m23 * box.max.y;
}
{
min.z += m.m23 * box.max.y;
max.z += m.m23 * box.min.y;
}
(m.m33 > 0.0f)
{
min.z += m.m33 * box.min.z;
max.z += m.m33 * box.max.z;
}
{
min.z += m.m33 * box.max.z;
max.z += m.m33 * box.min.z;
}
}
AABB碰撞盒的更多相关文章
- 分享一个U3D在Runtime显示碰撞盒的插件
有些时候,我们需要在Game视图显示碰撞盒,比如格斗游戏我要开发碰撞配置的工具,我经常需要看到碰撞盒,今天找了一下,没有发现合适的插件,我还花5美金买了一个插件,结果也只是在scene视图显示,这里我 ...
- (三)相遇射线的3D碰撞盒
序 在2D游戏中,我们知道处理碰撞时,需要设置精灵遮罩图.同样,进入3D,处理碰撞时需要3D模型作为“遮罩图”. 索尼克 飞檐走壁 目的 (1)处理模型间的碰撞问题 (2)获取鼠标 ...
- cocos 射线检测 3D物体 (Sprite3D点击)
看了很多朋友问怎么用一个3D物体做一个按钮,而且网上好像还真比较难找到答案, 今天翻了一下cocos源码发现Ray 已经封装了intersects函数,那么剩下的工作其实很简单了, 从屏幕的一个poi ...
- [算法][包围盒]球,AABB,OBB
参考地址请看图片水印:http://www.cnblogs.com/iamzhanglei/archive/2012/06/07/2539751.html http://blog.sina.com.c ...
- Cocos2d-x教程(34)-三维物体OBB碰撞检測算法
欢迎增加Cocos2d-x 交流群:193411763 个中心点.1个旋转矩阵和3个1/2边长(注:一个旋转矩阵包括了三个旋转轴,若是二维的OBB包围盒则是一个中心点,两个旋转轴,两个1/2边长). ...
- UE4物理模块(二)---建立物体碰撞
在前文中介绍了什么是物理以及如何在UE4和PhysX中进行可视化调试: Jerry:UE4物理模块(一)---概述与可视化调试zhuanlan.zhihu.com 这里调试只谈到了碰撞盒(后续还会有 ...
- unity3d关于碰撞问题
这个是我做忍者游戏出现的问题,做个记录也为以后有人遇到也可以借鉴.因为刚接触unity,所以对其所知甚少,说错的地方请指教. 问题:角色碰撞墙为什么会先触发碰撞地面,然后再触发碰撞墙 想要的效果:是角 ...
- Unity 碰撞器
Unity引擎的碰撞器 常见的有Box Collider,Capsule Collider等等 IsTrigger(触发器) 在这些碰撞器中有一个属性 Is Trigger(是否使用触发器) 触发器事 ...
- JAVA智能设备基于OpenGL的3D开发技术 之AABB碰撞检测算法论述
摘要:无论是PC机的3D还是智能设备应用上,碰撞检测始终是程序开发的难点,甚至可以用碰撞检测作为衡量3D引擎是否完善的标准.现有许多3D碰撞检测算法,其中AABB碰撞检测是一种卓有成效而又经典的检测算 ...
随机推荐
- How to fix “Duplicate sources.list entry …” issue
The correct format of repository source line is <type of repository> <location> <di ...
- Python 守护进程
import os import sys from time import sleep try: pid = os.fork() if pid > 0: sys.exit(0) # Exit p ...
- unity的旋转
绕着一个点旋转 : transform.RotateAround(Vector3.zero, Vector3.up, speed* Time.deltaTime ); 第一个参数,点的位置.第二个参数 ...
- C和BlockCode
在使用code block的时候,需要先build,然后再run,否则run的还是上次编译的内容.
- js中构造字符串若放入Grails中gsp的<g:link>标签出错
Grails的ajax使用json格式返回,在js中构造字符串时若放入<g:link>标签,字符串构造就会错误 如下就会发生错误,导致回调函数无法执行 function show(obj) ...
- Android手势监听
public class MainActivity extends Activity { /* * 要实现手指在屏幕上左右滑动的事件需要实例化对象GestureDetector,new * Gestu ...
- javascript 闭包暴露句柄和命名冲突的解决方案
暴露 最近在琢磨前端Js开源项目的东西,然后就一直好奇他们是怎么句柄暴露出来的,特整理一下两种方法. 将对象悬挂到window下面. 不使用var进行变量声明.下面上代码: (function(win ...
- BT5下安装Metasploit4.5方法
BT5与Ubuntu下安装最新版Metasploit4.5方法:(先把老版本的MSF uninstall,BT5自带的老版本Metasploit没有办法升级!) 1.下载Metasploit下的Lin ...
- 理解 Android 本地数据存储 API
利用首选项.SQLite 和内部及外部内存 API 对于需要跨应用程序执行期间或生命期而维护重要信息的应用程序来说,能够在移动设备上本地存储数据是一种非常关键的功能.作为一名开发人员,您经常需要存储诸 ...
- Xplico
http://zhulinu.blog.51cto.com/539189/850909