SICK LMS111激光雷达的使用
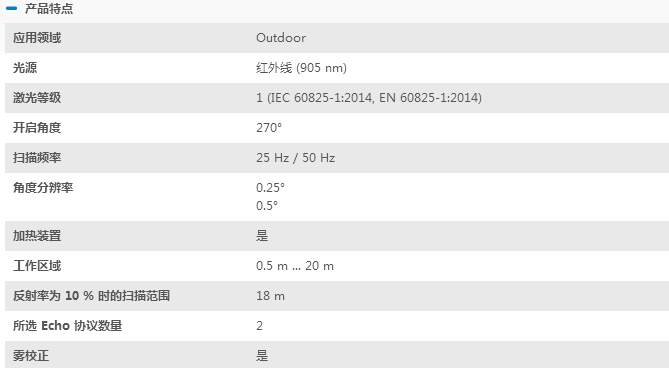
LMS111系列是SICK推出的一款用于室外区域防撞、测量及安防的激光扫描器。LMS111同西克其他扫描器一样,采用成熟的ToF原理,非接触式检测,且加入了最新的多次回波检测技术(两次回波),使得LMS111即使在恶劣环境下也能准确测量。LMS111的主要特点为:IP67的防护等级,雾气校正功能及内部集成加热器,保证其能用于户外,大监控范围(270°的扫描角度),灵活的区域配置(可以根据现场需要,设置各种图形的保护区域,且可以根据现场的需要,随时简单的修改图形)。LMS111还具有自检功能,检测稳定,对低反射率物体不敏感等优点,是室外型防撞/障碍测量或物体外形测量的最佳方案。主要用于港口设备防撞,重型设备室外防撞,高速公路车型分类及超限检测,铁路路轨障碍物检测,室外机器人防撞及导航等。

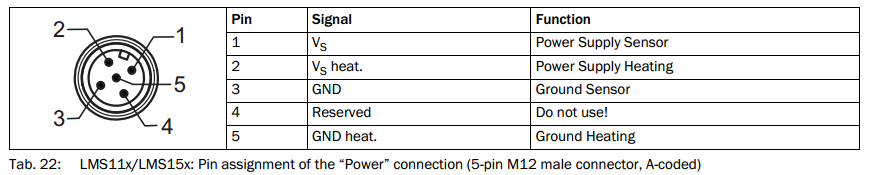
LMS111有5个电气接口,其中底部有4个M12的螺纹接口(接航空插头),正面还有一个辅助接口:

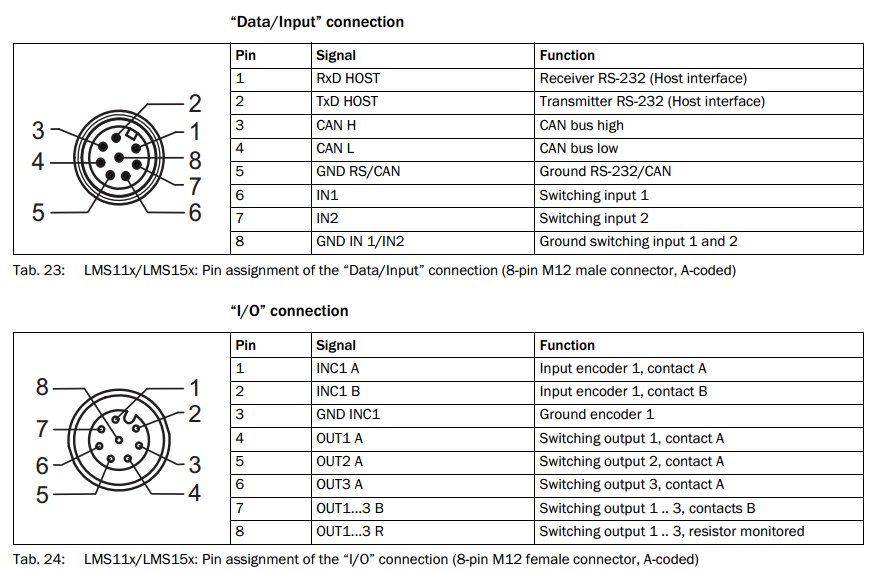
各个接口的针脚定义如下面几幅图所示。注意供电接口的输入电压有两种:传感器电压为DC 10.8 V~ 30 V ,典型功耗10W;加热电压为DC 24 V ± 20 %,典型功耗40W。如果不需要加热可以只接VS和GND两根线(在一些高纬度地区冬天气温极低,可能导致激光雷达不能正常工作,所以激光雷达里面就要集成自动加热装置。LMS111的工作环境温度为:–30 °C ~ +50 °C)。

LMS111有多种不同的接口(Ethernet、CAN、RS232)用于配置传感器参数和传输测量数据,其中只有Ethernet接口可以实时输出全部测量数据。RS232的传输速率有限,因此只适用于参数配置而不适合用来实时传输数据。Ethernet接口的出厂设置如下:
- IP address: 192.168.0.1
- subnet mask: 255.255.255.0
- TCP port: 2111 and 2112(Use port 2111 to confgure the device. Use port 2112 to view only measurement data)
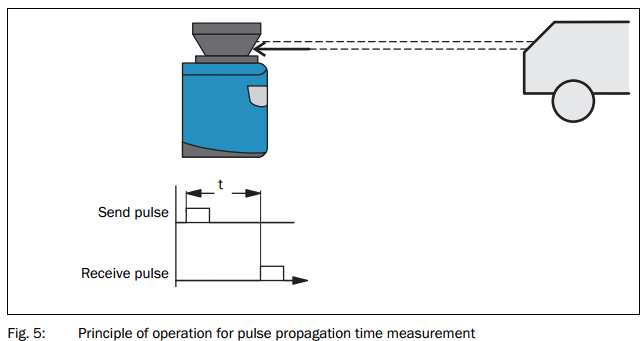
Operating principle of the LMS1xx
ToF是Time of Flight的缩写,直译为飞行时间,通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测这些发射和接收光脉冲的飞行(往返)时间来得到目标物距离。ToF的照射单元都是对光进行高频调制之后再进行发射,一般采用LED或激光来发射高性能脉冲光,主要采用红外光。
 被测目标物体表面反射率是关系到激光雷达测量能力的关键参数。而影响物体表面反射率的因素主要有物体表面颜色和表面类型(亚光,高亮,平滑,粗糙等)。我们通常定义柯达白板(Kodak white material)的表面反射率为100%,因此根据这一定义光亮表面的反射率一般会大于100%。The reflection of the laser beam will vary as a function of the surface’s structure and color. Light surfaces reflect the laser beam better than dark surfaces and can be detected by the LMS1xx over larger distances. Bright white plaster reflects approx. 100% of the incident light, black foam rubber approx. 2.4%
被测目标物体表面反射率是关系到激光雷达测量能力的关键参数。而影响物体表面反射率的因素主要有物体表面颜色和表面类型(亚光,高亮,平滑,粗糙等)。我们通常定义柯达白板(Kodak white material)的表面反射率为100%,因此根据这一定义光亮表面的反射率一般会大于100%。The reflection of the laser beam will vary as a function of the surface’s structure and color. Light surfaces reflect the laser beam better than dark surfaces and can be detected by the LMS1xx over larger distances. Bright white plaster reflects approx. 100% of the incident light, black foam rubber approx. 2.4%
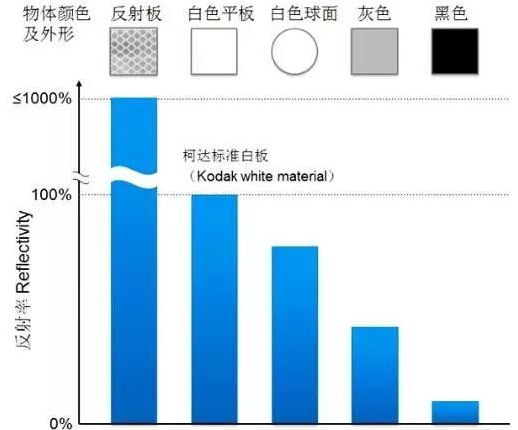
自然界中常见材料的物体表面反射率如下:

激光雷达的工作距离和物体表面反射率有类线性关系(The better a surface reflects the incident radiation, the greater the scanning range of the LMS1xx ),激光扫描器一般用100%反射率及10%反射率两个参数条件表示工作距离。如下是LMS111系列产品的反射率对应工作距离关系图:
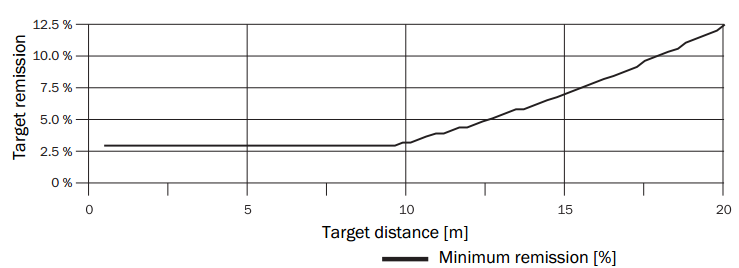
Scanning range as a function of the target remission
根据反射原理,反射角等于入射角(incident angle:是入射光线与入射表面法线的夹角)。如果激光束入射角较小,就会造成激光束的反射光束不能返回到接收器。在该点的测量值就会显示为无物体,也就是数据丢失的情况。如:高亮汽车漆、抛光的金属表面类似镜反射。
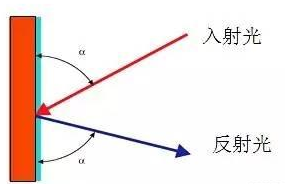
当激光垂直物体表面入射时(入射角为90°),这时返回的激光能量最大(The energy is optimally reflected)。当激光与物体表面成一定入射角,则反射能力会有相应的损失,入射角越小,返回扫描器的光越少,检测距离也就越近。

Reflection of the laser beam at the surface of an object
If the reflected energy returned is over 100% (basis: Kodak standard) the incident beam is not reflected diffusely in all directions, but is reflected in a specific direction. As a result a large portion of the energy emitted can be received by the laser distance measurement device.

Degree of reflection
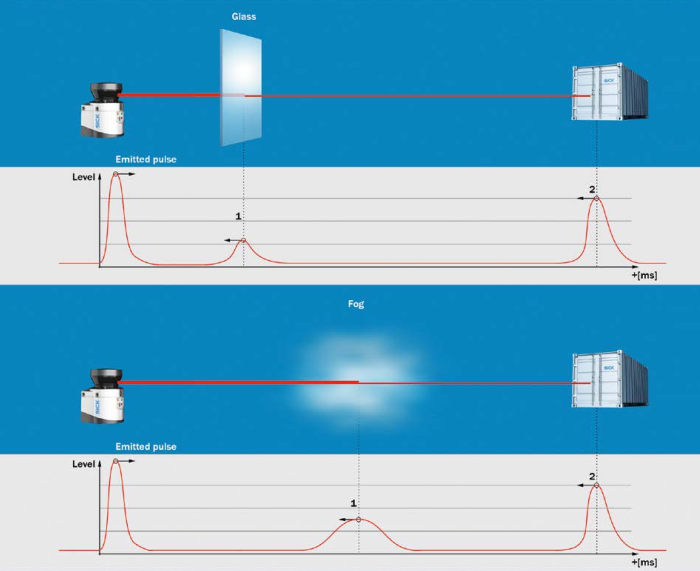
二次回波检测
If the LMS1xx hits a rain drop first. This will reflect part of the energy (1st reflected pulse). The other part of the beam continues to propagate and is reflected by the actual object (2nd reflected pulse)

Principle of operation of the measurement of the second reflected pulse
The LMS1xx can analyze two echo signals for each measuring beam. This enables it to provide reliable measurement results at all times – even if it is behind glass or exposed to adverse weather and environmental influences outdoors.
SOPAS Engineering Tool
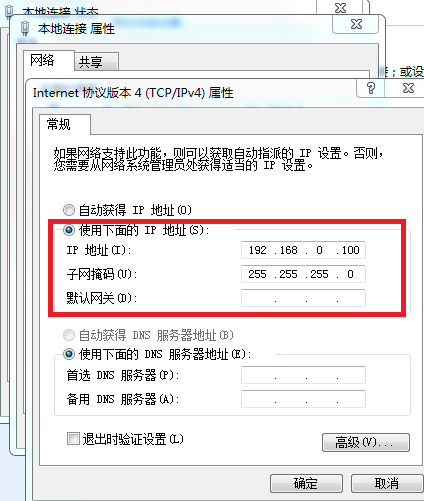
在Windows系统上可以用SOPAS Engineering Tool V3 软件配置传感器参数,或者进行测试。首先需要安装LMS111的SOPAS驱动SDD (SOPAS device driver) ,安装好后将Ethernet网线接口插入电脑,然后配置电脑的IP地址,使其与LMS111处于同一网段中:
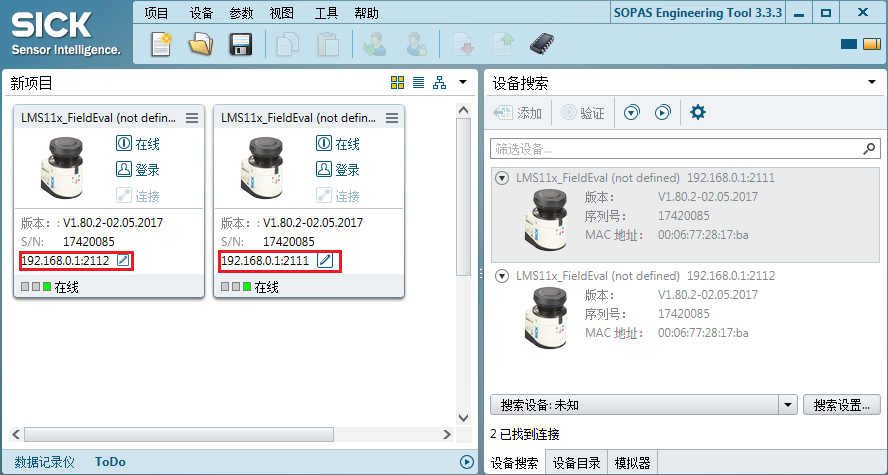
在SOPAS软件中搜索设备,如果驱动和IP地址设置都没问题,就可以连接上LMS111激光雷达(如下图所示)。注意Port 2111和Port 2112端口都可以使用,通常用Port 2111来配置传感器参数,用Port 2112来观察测量数据。
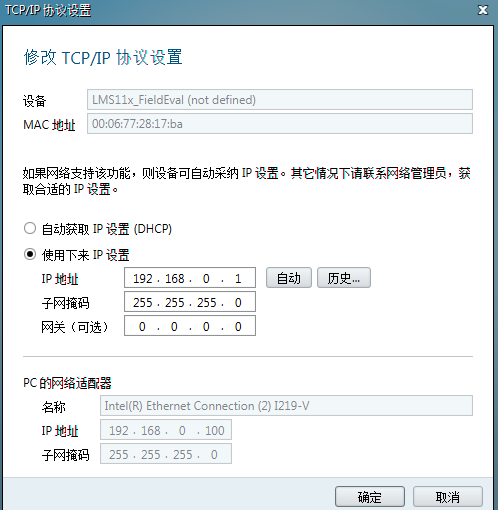
LMS111默认IP地址为192.168.0.1,在SOPAS软件中也可以根据需要自行修改:
连接上传感器并切换到在线模式后可以打开设备页面查看激光数据,但是要更改传感器参数配置需要以授权用户登陆,否则界面中的所有选项框都为灰色无法选中。
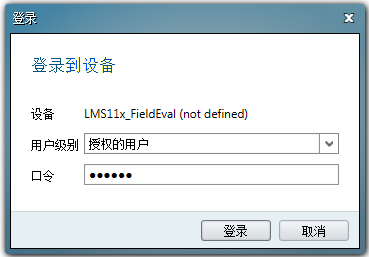
选择用户级别为:授权的用户(Authorized Client),密码为:client

LMS111与SOPAS软件之间存取数据的示意图如下,配置参数可以临时写入LMS111的RAM中进行测试,也可以永久写入EEPROM中保存。
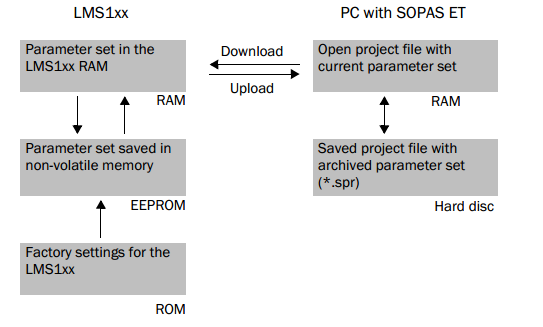
Principle of data storage
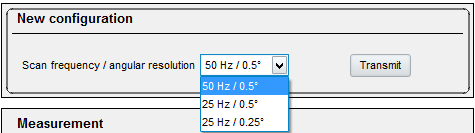
比如可以配置传感器扫描频率和角度分辨率(默认为50Hz/0.5°):
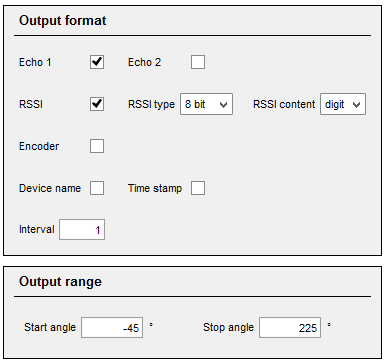
也可以选择要输出的数据和输出角度范围:
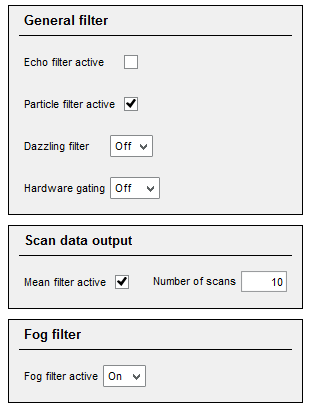
Filter选项中可以设置各种滤波器:
- Echo Filter Active:透过玻璃或雨滴等检测时用到,普通应用不需要。If two pulses are reflected by two objects during a measurement (drops of rain or edges etc.), the filter initially filters out the first reflected pulse (echo).
- Particle Filter Active:粉尘等微小颗粒过滤。The particle filter can be used in dusty surroundings or in case of rain or snow to filter out interference due to particles of dust, rain drops, snow flakes etc.
- HardWare Gating:设置固定距离的免检测区域
- Fog Filter:雾气的过滤。The fog filter suppresses possible glare due to fog
- Mean filter:输出平均值(The mean filter acts on the measured value output, not on the field application),勾选后可以在右侧文本框中输入要平均的次数。比如扫描10 次后,输出平均值(同时,输出频率也要除以10 )
区域防护功能的设置
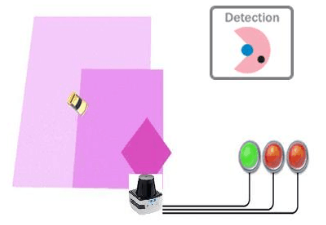
LMS111可以用于测量和检测(Detection),在扫描范围内,设置不同形状的检测区域,当检测到有物体进入该区域时,通过开关量信号输出检测结果。通常用于设备防撞、物体检测、区域安防等。
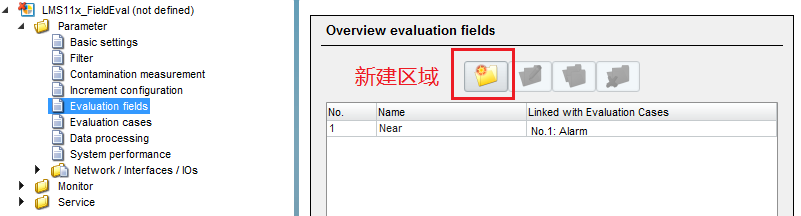
SOPAS软件中先设置防护区域 (Parameter→Evaluation fields),在这里设定防护区域的大小和形状。点击新建按钮增加防护区域:
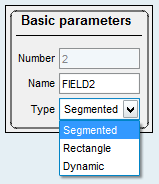
在跳出的窗口中编辑区域名称,并选择设置方式,如下图:其中 Segmented 是编辑多边形的每一个点;Rectangle 是长方形区域;Dynamic 是变化区域。
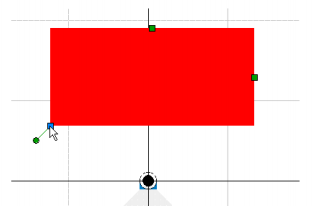
长方形区域如下图所示,可以拖动控制点来改变长宽尺寸以及长方形的位置和旋转角度。也可以直接在编辑框中输入指定的位置、尺寸。
多边形区域可以直接编辑每个点的坐标(可以参考文档Laser Measurement Systems of the LMS100 Product):
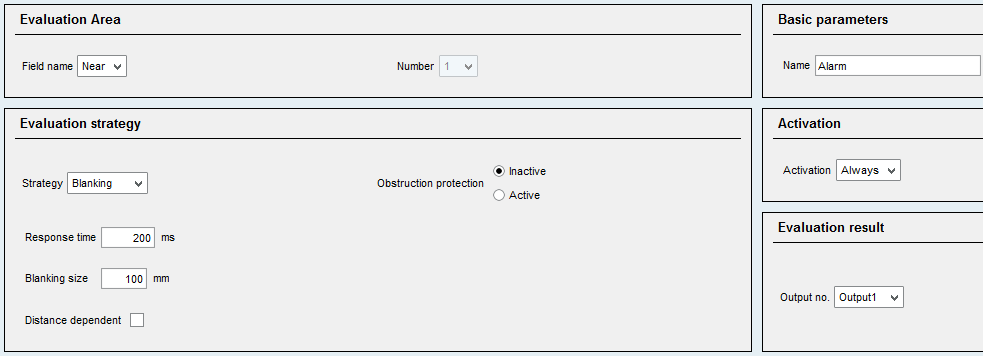
以常用的长方形区域为例,设置一个Near区域。然后设置防护条件(Parameter→Evaluation cases) ,在这里设置区域防护的功能以及执行。点击新建按钮 ,在跳出新的界面中:Field name选择刚刚创建的Near区域, 名字输入Alarm。
功能设置如下:
- Strategy:Blanking 屏蔽功能
- Response Time:响应时间为 200ms,当有物体入侵超过 200ms 时,LMS 会报警
- Blanking Size:屏蔽的宽度,当物体宽于 100mm 时,LMS 会报警
区域防护对应的输出选择为 Output1,LMS 检测到物体时 Output1会有输出:
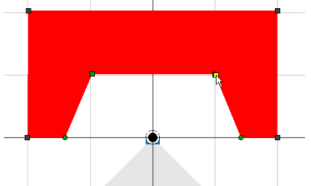
 设置好后可以点击“将全部参数下载到设备”按钮或“永久保存”按钮,将配置保存到LMS111中,接下来就可以进行区域防护功能测试。点击进入 Monitor→Field Evaluation Monitor 页面,可以看到LMS动态的轮廓检测图,并且可以看到1号防护区域。当有符合检测尺寸要求的物体入侵 1号警报区域时,绿色区域会变为黄色:
设置好后可以点击“将全部参数下载到设备”按钮或“永久保存”按钮,将配置保存到LMS111中,接下来就可以进行区域防护功能测试。点击进入 Monitor→Field Evaluation Monitor 页面,可以看到LMS动态的轮廓检测图,并且可以看到1号防护区域。当有符合检测尺寸要求的物体入侵 1号警报区域时,绿色区域会变为黄色:
LMS111-ROS
打开终端,输入下面命令安装LMS1xx驱动:
sudo apt-get install ros-indigo-lms1xx
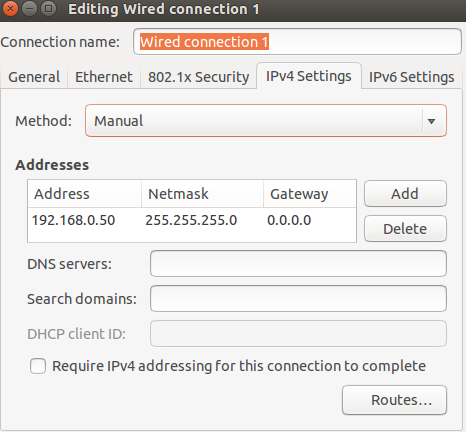
如果在虚拟机中运行Ubuntu系统,将虚拟机的网络设为桥接模式:
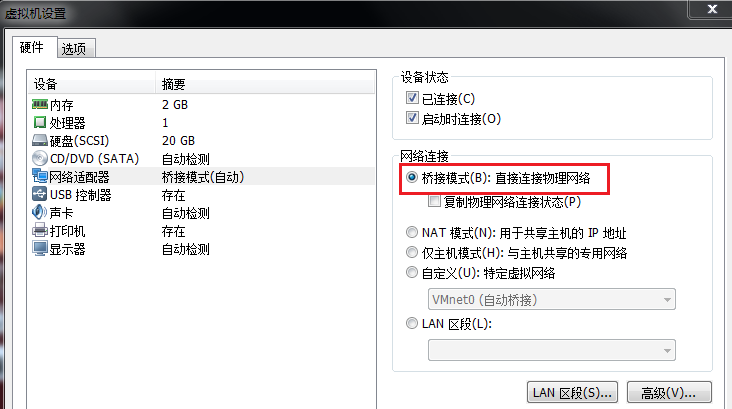
然后手动修改虚拟机中的网络连接,让ubuntu与LMS111处于同一网段中:
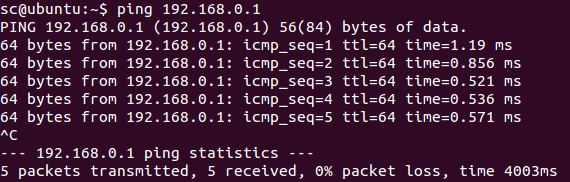
然后可以使用ping命令检查网络是否连通:
运行roscore启动ros主节点后,输入下面命令启动LMS1xx节点:
rosrun lms1xx LMS1xx_node _host:=192.168.0.1
注意LMS1xx包中host参数默认地址为192.168.1.2,因此运行节点时需要给host参数赋予正确的IP地址,另外也可以自行指定激光雷达坐标系的名字(默认为laser)。
- host (string, default: 192.168.1.2):The device hostname or IP address.
- frame_id (string, default: laser):The laser data frame. This frame should be at the optical center of the laser, with the x-axis along the zero degree ray, and the y-axis along the pi/2 degree ray.
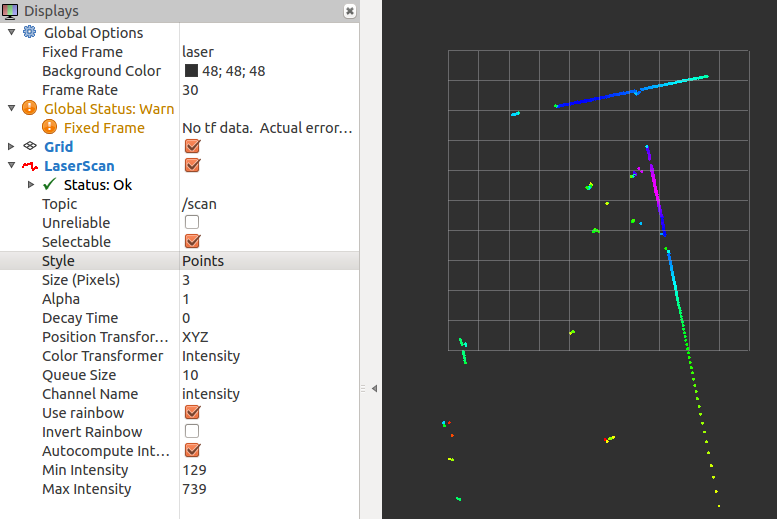
如果上面的过程没问题,运行LMS1xx_node节点后会提示连接到laser:
该节点会自动在scan话题上发布LaserScan消息,我们可以打开rviz查看激光扫描信息:
参考:
ROS 连接SICK LMS100激光,并用RVIZ显示(网线端口)
SICK LMS111激光雷达的使用的更多相关文章
- SICK TiM561激光雷达的使用
TIM系列激光扫描传感器原理: 激光发射器发出激光脉冲,当激光碰到物体后,部分激光反射回激光接收器.通过计算发射/接收脉冲时间差,可以计算出距离值.激光扫描器连续不停的发射激光脉冲,由旋转的光学机构将 ...
- [硬件]SICK LMS111激光扫描仪使用
1.电源接入 电源线5Pin,4芯.棕色线接入正极,蓝色线接入负极(直流电,地线).LMS111-100默认的电压范围是10-30V,推荐使用24V,我这里使用的是12V/3A的锂电池. 另外两根白色 ...
- [ROS]激光驱动安装
参考资料: https://blog.csdn.net/hongliang2009/article/details/73302986 https://blog.csdn.net/bohaijun_12 ...
- ROS安装(2)
1.Ubuntu无法启动了,进入不了启动界面 刚高兴一会会儿,马上系统重启,进不了登陆界面了.只有控制台的login,无语.试了好几种方法都没有解决. 重装吧!重装Ubuntu之后,装完ROS Kin ...
- SICK激光雷达LMS511测量数据说明
帧结构说明 LMS511的官方手册存在几个版本,在<Laser Measurement Systems of the LMS500 Product Family>的英文手册中,对单次(连续 ...
- VREP中的二维激光雷达
目前,轮式机器人的研究中已经大量使用激光雷达辅助机器人的避障导航,考虑到使用成本,一般二维激光雷达使用较多,如下图.由于只能扫描一个平面,如果想用二维激光雷达获取环境三维点云,则需要通过移动机器人或加 ...
- golang+webgl实践激光雷达(一)激光扫描仪基础知识
一.前言 最近做一个测量料堆形状的项目,通过前期调研,最后决定用激光测距原理进行测量.通过旋转云台+激光扫描仪实现空间三维坐标的测量.其中激光扫描仪扫射的是一个二维的扫描面,再通过云台旋转,则形成一个 ...
- Lidar激光雷达市场
Lidar激光雷达市场 近年来,激光雷达技术在飞速发展,从一开始的激光测距技术,逐步发展了激光测速.激光扫描成像.激光多普勒成像等技术,如今在无人驾驶.AGV.机器人等领域已相继出现激光雷达的身影. ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——1.ydlidar-x4激光雷达
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
随机推荐
- HTML5 本地文件操作之FileSystemAPI整理(一)
一.请求配额 DeprecatedStorageInfo对象 window.webkitStorageInfo:当使用持久存储模式时需要用到该对象的接口 方法: 1.requestQuota(type ...
- [转]php的public、protected、private三种访问控制模式的区别
FROM : http://blog.163.com/weiwenjuan_bj/blog/static/14035033620129304183850/?suggestedreading publi ...
- iOS:在tableView中通过Masonry使用autolayout在iOS7系统出现约束崩溃
一.出现崩溃情景: 给tableView创建一个头视图,也即tableHeaderView,然后使用Masonry并切换到iOS7/7.1系统给tableHeaderView中的所有子视图添加约束,此 ...
- 这篇NLP文章不错,BERT,好好读一下
http://dy.163.com/v2/article/detail/DU5PE7V30511ABV6.html 狂破11项记录,谷歌年度最强NLP论文到底强在哪里?
- Fedora 18/19没有注销
sudo yum install dconf-editor -y 定位到org > gnome > shell 勾选always-show-log-out http://www.ryan ...
- C# 遍历文件夹非递归实现(采用队列的广度优先算法)(转)
一.实现思路: 1. 创建一个队列(使用C# 队列类 Queue,需要使用命名空间 System.Collections.Generic): 2. 把起始文件夹名称排入队中: 3. 检查队列中是否有文 ...
- Binary Tree Maximum Path Sum leetcode java
题目: Given a binary tree, find the maximum path sum. The path may start and end at any node in the tr ...
- 九度oj-1001-Java
题目描述: This time, you are supposed to find A+B where A and B are two matrices, and then count the ...
- Docker实战之创建一个tomcat容器
一.Docker与虚拟机的区别 二.Docker学习步骤 2.1:安装宿主操作系统 在VMVare中安装了Ubuntu 16.04.2 LTS (GNU/Linux 4.4.0-62-generic ...
- mongodb的用法
关于新版(2.***)的c#用法,网上基本没有.昨天折腾半天,去构造server,发现现在新版本不需要了,文档是这样的,大概意思,无需像原来那样获取server,直接从client获取db就行了. h ...