Android设备中实现Orientation Sensor(图)兼谈陀螺仪
设备中的三自由度Orientation Sensor就是一个可以识别设备相对于地面,绕x、y、z轴转动角度的感应器(自己的理解,不够严谨)。智能手机,平板电脑有了它,可以实现很多好玩的应用,比如说指南针等。
我们可以用一个磁场感应器(magnetic sensor)来实现。
磁场感应器是用来测量磁场感应强度的。一个3轴的磁sensor IC可以得到当前环境下X、Y和Z方向上的磁场感应强度,对于Android中间层来说就是读取该感应器测量到的这3个值。当需要时,上报给上层应用程序。磁感应强度的单位是T(特斯拉)或者是Gs(高斯),1T等于10000Gs。
先来看看android定义的坐标系,在/hardware/libhardware/include/hardware/sensors.h中有个图。
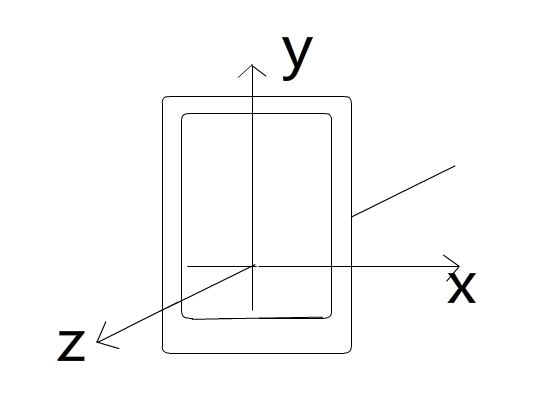
图中表示设备的正上方是y轴方向,右边是x轴方向,垂直设备屏幕平面向上的是Z轴方向,这个很重要。因为应用程序就是根据这样的定义来写的,所以我们报给应用的数据要跟这个定义符合。还需要清楚磁sensor芯片贴在板上的坐标系。我们从芯片读出数据后要把芯片的坐标系转换为设备的实际坐标系。除非芯片贴在板上刚好跟设备的x、y、z轴方向刚好一致(去感谢你的硬件工程师吧)。
Orientation Sensor的实现是根据磁场感应强度的3个值计算出另外3个值。当需要时,我们计算出这3个值上报给应用程序,Orientation Sensor的功能就实现了。
这3个值具体含义和计算方法是:
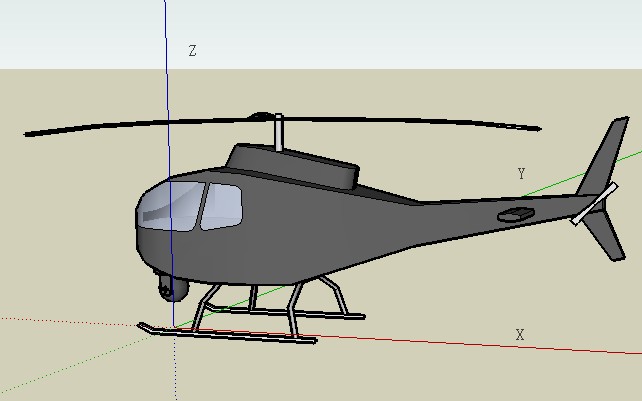
1. azimuth 方位角:就是绕z轴转动的角度,0度=正北,(假设Y轴指向地磁正北方,直升机正前方的方向如下图)
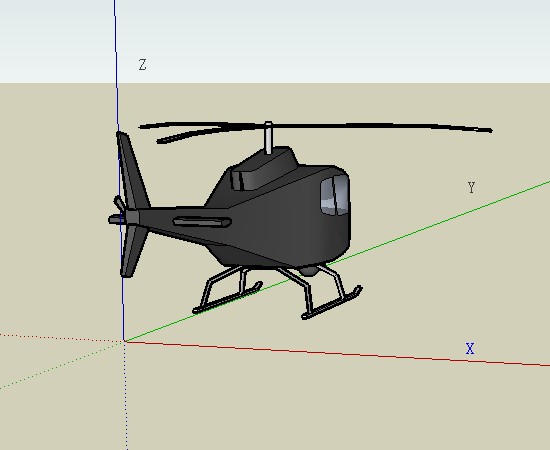
90度=正东,
180度=正南,
270度=正西。
求x和y方向的磁感应强度的反正切,就可以得到方位角(算法看后面poll函数中的代码)。要实现指南针,只需要这个就可以了(不考虑设备非水平的情况);
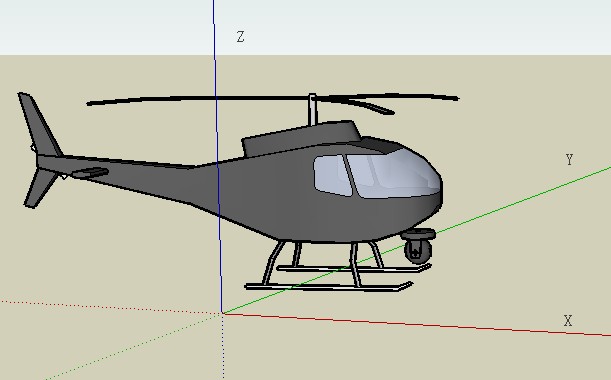
2. pitch 仰俯:绕X轴转动的角度 (-180<=pitch<=180), 如果设备水平放置,前方向下俯就是正,如图:
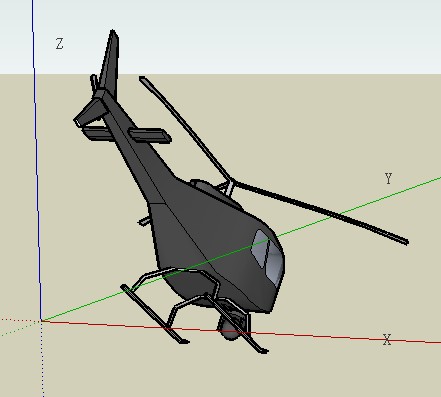
前方向上仰就是负值;
求磁sensor的y和z反正切可得到此角度值。
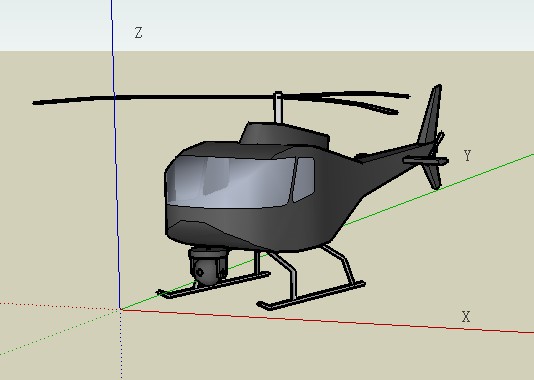
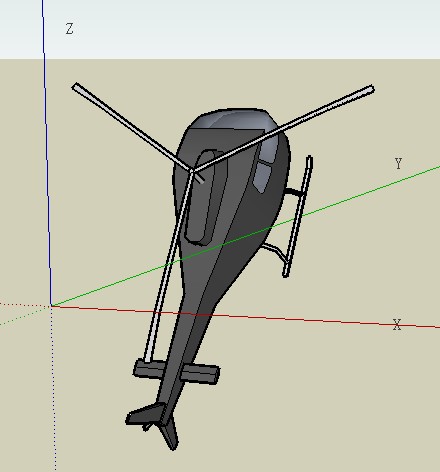
3. roll 滚转:绕Y轴转动(-90<=roll<=90),向左翻滚是正值
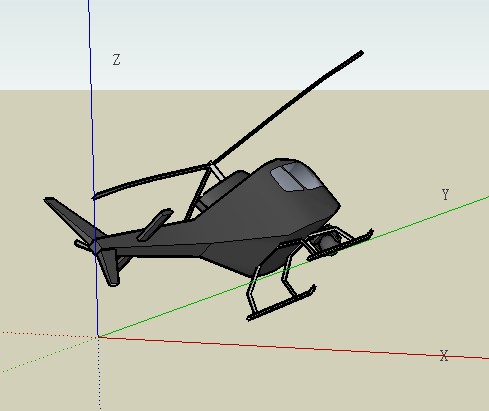
向右翻滚是负值;
求z和x的反正切可得到此值。
sensors.h中还定义了其他各种sensor。要实现的就是这两个:
#define SENSOR_TYPE_MAGNETIC_FIELD 2
#define SENSOR_TYPE_ORIENTATION 3
在/hardware/sensors/sensors.cpp 中添加对MAGNETIC_FIELD和ORIENTATION 的支持
简单的说一下怎样添加,下面的代码不完整,请参考/sdk/emulator/sensors/sensors_qemu.c
- //加入需要的宏定义
- #define ID_BASE SENSORS_HANDLE_BASE
- #define ID_ACCELERATION (ID_BASE+0)
- #define ID_MAGNETIC_FIELD (ID_BASE+1)
- #define ID_ORIENTATION (ID_BASE+2)
- #define S_HANDLE_ACCELEROMETER (1<<ID_ACCELERATION)
- #define S_HANDLE_MAGNETIC_FIELD (1<<ID_MAGNETIC_FIELD)
- #define S_HANDLE_ORIENTATION (1<<ID_ORIENTATION)
- #define SENSORS_NUM 4
- #define SUPPORTED_SENSORS ((1<<NUM_SENSORS)-1)
- //在 sensor_t sensors_list[] 中添加两个sensor的信息,
- //这些只是一些Sensor的信息,应用程序可以获取到。
- #ifdef MAGNETIC_FIELD
- {
- name : "XXX 3-axis Magnetic field sensor",
- vendor : "XXX company",
- version : 1,
- handle : S_HANDLE_MAGNETIC_FIELD,
- type : SENSOR_TYPE_MAGNETIC_FIELD,
- maxRange : 600.0f,//最大范围
- resolution : 30.0f,//最小分辨率
- power : 6.7f,//这个不太懂
- },
- #endif
- #ifdef ORIENTATION
- {
- name: "XXX Orientation sensor",
- vendor: "XXX company",
- version: 1,
- handle: S_HANDLE_ORIENTATION,
- type: SENSOR_TYPE_ORIENTATION,
- maxRange: 360,
- resolution: 0.1,
- power: 20,
- },
- #endif
- //定义一个结构来保存orientation的信息
- static struct orientation{
- float azimuth;
- float pitch;
- float roll;
- }orientation;
- //在 control__open_data_source()函数中打开设备
- static native_handle_t*
- control__open_data_source(struct sensors_control_device_t *dev)
- {
- SensorControl* ctl = (void*)dev;
- native_handle_t* handle;
- int fd_m = open (MAGNETIC_DATA_DEVICE, O_RDONLY);
- LOGD ("Open Magnetic Data source: %d, %d/n", fd_m, errno);
- if (fd_m>= 0)
- {
- dev->fd[ID_MAGNETIC_FIELD] = dup(fd_m);
- }
- return handle;
- }
- //实现数据的打开和关闭函数
- static int
- data__data_open(struct sensors_data_device_t *dev, native_handle_t* handle)
- {
- struct sensors_data_context_t *dev;
- dev = (struct sensors_data_context_t *)device;
- for(int i=0 ;i<SENSORS_NUM; i++)
- {
- dev->fd[i] = dup(handle->data[i]);
- }
- native_handle_close(handle);
- native_handle_delete(handle);
- return 0;
- }
- static int
- data__data_close(struct sensors_data_device_t *dev)
- {
- struct sensors_data_context_t *dev;
- dev = (struct sensors_data_context_t *)device;
- for(int i=0 ;i<SENSORS_NUM; i++)
- {
- if (dev->fd[i] >= 0)
- {
- close(dev->fd[i]);
- }
- dev->fd[i] = -1;
- }
- return 0;
- }
- //最关键的poll函数
- static int
- data__poll(struct sensors_data_device_t *dev, sensors_data_t* values)
- {
- SensorData* data = (void*)dev;
- int fd = data->events_fd;
- //判断设备是否打开
- if(dev->fd[ID_MAGNETIC_FIELD] < 0)
- {
- LOGD("In %s dev[%d] is not open!/n",__FUNCTION__ ,ID_MAGNETIC_FIELD);
- return -1;
- }
- pollfd pfd[SENSORS_NUM] =
- {
- //省略其他sensor代码
- {
- fd: dev->fd[ID_MAGNETIC_FIELD],
- events: POLLIN,
- revents: 0
- },
- //省略其他sensor代码
- };
- int err = poll (pfd, SENSORS_NUM, s_timeout);
- unsigned int mask = SUPPORTED_SENSORS;
- static unsigned int poll_flag=0;
- if(poll_flag==0)
- {
- poll_flag = mask;
- }
- //省略其他sensor
- if(poll_flag&(1<<ID_MAGNETIC_FIELD))
- {
- if((pfd[ID_MAGNETIC_FIELD].revents&POLLIN) == POLLIN)
- {
- char rawData[6];
- err = read (dev->fd[ID_MAGNETIC_FIELD], &rawData, sizeof(rawData));
- if(err<0)
- {
- LOGE("read magnetic field ret:%d errno:%d/n", err, errno);
- return err;
- }
- struct timespec t;
- clock_gettime(CLOCK_REALTIME, &t);
- data->time = timespec_to_ns(&t);
- data->sensor = SENSOR_TYPE_MAGNETIC_FIELD;
- data->magnetic.status = SENSOR_STATUS_ACCURACY_HIGH;
- //上报的数据单位要转换成 uTesla
- data->magnetic.x = ( (rawData[1] << 8 ) | rawData[0])/ MAGNETIC_CONVERT;
- data->magnetic.y = ( (rawData[3] << 8 ) | rawData[2])/ MAGNETIC_CONVERT;
- data->magnetic.z = ( (rawData[5] << 8 ) | rawData[4])/ MAGNETIC_CONVERT;
- //把陀螺仪需要的数据计算出来,用atan2(),头文件要加上#include <math.h>
- float azimuth = atan2( (float)(data->magnetic.x ),(float)(data->magnetic.y) );
- if(azimuth<0)
- {
- azimuth = 360 - fabs(azimuth*180/PI);
- }
- else
- {
- azimuth = azimuth*180/PI;
- }
- orientation.azimuth = 360-azimuth;
- //rotation around the X axis.+180~-180 degree
- orientation.pitch = atan2( (float)(data->magnetic.y ),(float)(data->magnetic.z)
- )*180/PI;
- //rotation around the Y axis +90~-90 degree
- float roll = atan2( (float)(data->magnetic.x ),(float)(data->magnetic.z) )
- *180/PI;
- if (roll > 90)
- {
- roll = -(180.0-roll);
- }
- else if (roll < -90)
- {
- roll = 180 + roll;
- }
- orientation.roll = roll;
- }
- return S_HANDLE_MAGNETIC_FIELD;
- }
- if(poll_flag&(1<<ID_MAGNETIC_FIELD))
- {
- //数据已经计算好了直接上报就行
- struct timespec t;
- clock_gettime(CLOCK_REALTIME, &t);
- data->time = timespec_to_ns(&t);
- data->sensor = SENSOR_TYPE_ORIENTATION;
- data->orientation.azimuth = orientation.azimuth;
- data->orientation.pitch = orientation.pitch;
- data->orientation.roll = orientation.roll;
- poll_flag &= ~(1<<ID_ORIENTATION);
- return S_HANDLE_ORIENTATION;
- }
- }
写好后可以用一个叫做sensorlist的程序先测试一下,看报上去的数据是否正常。然后可以试试一个叫做Pacific Navy Fighter 的游戏来爽一爽了。
由于涉及到很多方面的内容,错误难免,敬请指正。
=====================
补充:我之前搞错了,我以为Orientation Sensor就叫做陀螺仪。谢谢syz85。
之后我又看了一下Android中对陀螺仪(gyroscope Sersor)的定义,是指在上述定义的x y x三个方向的转速,单位是radians/second,正负遵循右手规则。
想一想实现应该也不难,把从Orientation Sensor两次得到的 x y z角度变化除以时间就可以得到转速。
(其实真正的陀螺仪包括Orientation Sensor和gyroscope Sersor这两个功能)
但转速对于手机或其他消费类电子有意义是什么呢?谁指点我一下,gyroscope 会带来什么好玩的应用。
Android设备中实现Orientation Sensor(图)兼谈陀螺仪的更多相关文章
- bat如何创建多级文件夹(在android设备中)
在android设备中要创建多个或者多级文件夹时,手动去创建费时费力(有点傻),一个bat文件就能很好的实现这个功能. 1.首先创建同级多个文件夹且在该文件夹下生成一个文件 @echo off ech ...
- 通过ADB命令行卸载或删除你的Android设备中的应用(转载)
转自:http://mytiankong.com/?p=11755 如果你对你的Android设备在与命令行的交互间有一定的兴趣,那你可能想学习一些使用ADB卸载设备中已安装应用的技巧.为了使这种方法 ...
- 从Android设备中提取内核和逆向分析
本文博客链接:http://blog.csdn.net/qq1084283172/article/details/57074695 一.手机设备环境 Model number: Nexus 5 OS ...
- 在桌面chrome中调试android设备中的web页面
准备工作 1, 桌面版chrome 2, Android设备(安装有chrome浏览器) 3, Android-sdk Android-sdk安装及设置 SKD安装 从http://developer ...
- 获取Android设备的方向,Sensor和SensorManager实现手机旋转角度
http://www.jcodecraeer.com/a/anzhuokaifa/androidkaifa/2012/1009/425.html 带有g-sensor的Android设备上可通过API ...
- 浅析Android设备中grep命令处理流程
2017-04-18 概述 在TV开发板中,可以在串口中直接使用grep命令.这是因为在/system/bin/下有一个'grep'链接.这个链接指向'/system/bin/toolbo ...
- Android Studio中绘制simpleUML类图详细说明及使用
一.Android Studio中安装simpleUML 1.下载simpleUML jar包 地址为:http://plugins.jetbrains.com/ 搜索 simpleUMLCE 2. ...
- 从android设备中提取内核
背景 CVE-2013-2597 是高通 msm_acdb 设备驱动的一个 copy_from_user 栈溢出,利用要用到ROP.f101的漏洞利用介绍中,用到几处Gadgets,显然要根据acdb ...
- 通过adb命令在Android设备中执行Java命令, 并调用so文件。
一.难点一:无法复制so文件到/system/lib或者/vendor/lib下,提示只读 解决方法: 2.使用android device monitor放库进入到 /system/lib出现只读权 ...
随机推荐
- div中实现居中
今天纠结了大半天的居中,把学到的先记录下来,还没完全弄清楚,发现网上原创的技术贴并不算多,大多都是相互转载.(ps.先安利一个大神的帖集,昨天才发现的,内容丰富,语言,呃...很幽默,一般都是图文并茂 ...
- python代码合并
http://www.baidu.com/s?wd=python%E4%BB%A3%E7%A0%81%E5%90%88%E5%B9%B6&rsv_bp=0&ch=&tn=mon ...
- (转)TortoiseSVN使用简介
TortoiseSVN使用简介 TortoiseSVN使用简介 2009-04-24 来源:dev.idv.tw 1 安装及下载client 端 2 什么是SVN(Subversion)? 3 为甚么 ...
- ImageView的学习
学习安卓时我还是习惯看懂手册,虽然是英文但是可以获得的东西必然也是更多的,否则自己只能停留在拾人牙缝的水平,虽然我是初学,但是还是分享一些自己的学习过程及方法. 从手册中我们看以知道,ImageVie ...
- Redhat Enterprise 5.4下安装配置Oracle 11g R2详细过程
1.Linux环境配置准备 环境:Linux:Redhat Enterprise 5.4,DB:Oracle 11g R2 X64,Oracle安装到/home/oralce_11目录下. 配置过程如 ...
- PHP中的定界符格式
<?php //nowdoc(单引号定界符) //ABC可以是任合内容,放在单引号中 $c=<<<'ABC' 这里可以是任合内容 我是历的苛夺基 本原则叶落归根在运 输费艰难田 ...
- Linux程序设计笔记
使用size命令查看二进制文件时,结果并不一定和预测占用内存大小一致,因为可能存在内存对齐,导致内存字节数比实际的更多 在C语言中,字符串常量存放在text segment中,在C++中却是存储在da ...
- 工作中用到的Jquery特效
jQuery缓慢弹出下拉tab导航 http://sc.chinaz.com/jiaoben/130811578701.htm
- 实现单实例多线程安全API问题
前阵子写静态lib导出单实例多线程安全API时,出现了CRITICAL_SECTION初始化太晚的问题,之后查看了错误的资料,引导向了错误的理解,以至于今天凌晨看到另一份代码,也不多想的以为singl ...
- python内置函数(4)
12.pow: >>> 2**10 1024 >>> pow(2,10) 1024 13.repr():忽略.. 14.reversed():反转.. 1 ...