第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
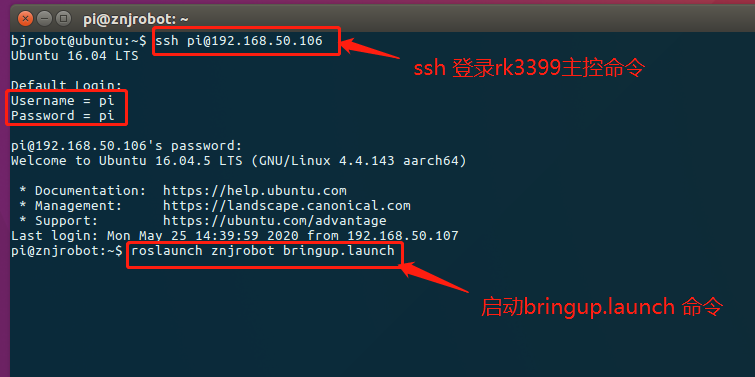
2.再打开一个终端,ssh 过去主控端启动 roslaunch znjrobot navigate_multi.launch。

3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。

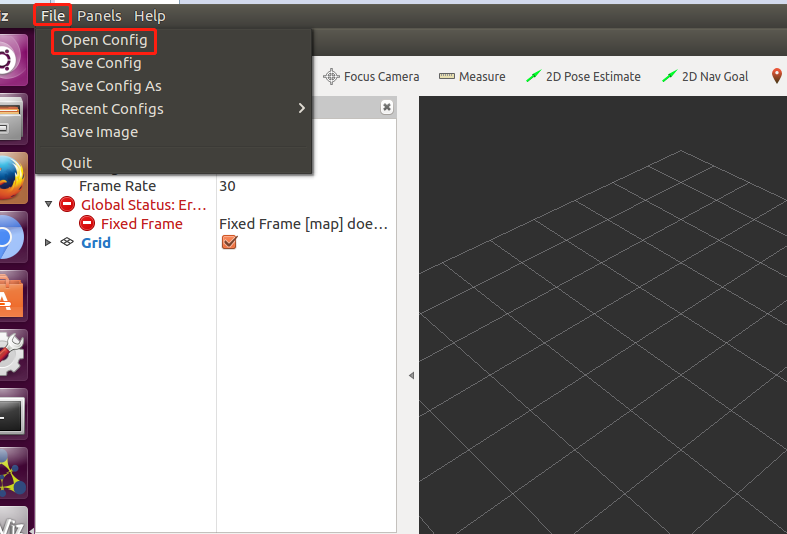
4.全屏化后点击 File,点击 Open Config,
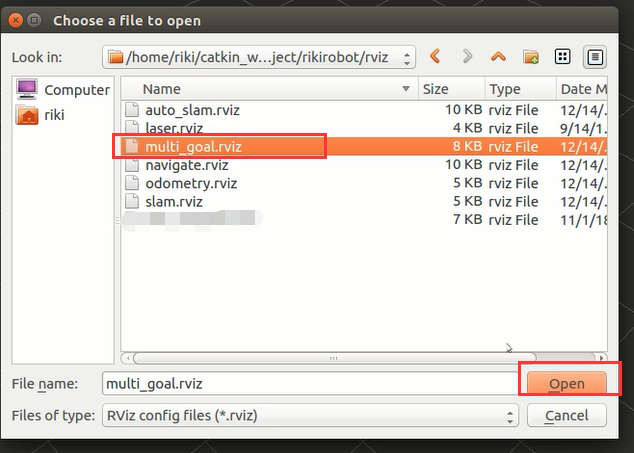
5.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/multi_goal.rviz, 的 multi_goal.rviz 文件。点 Open
6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
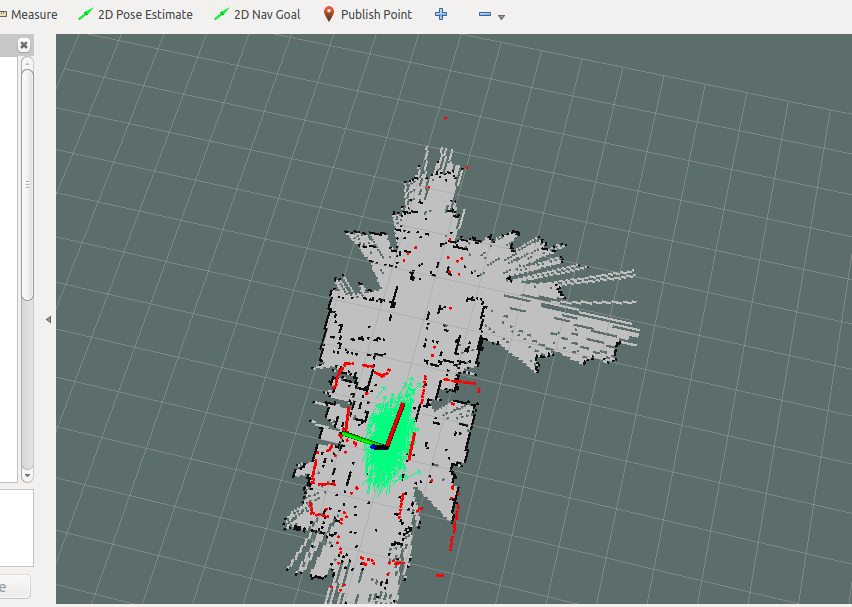
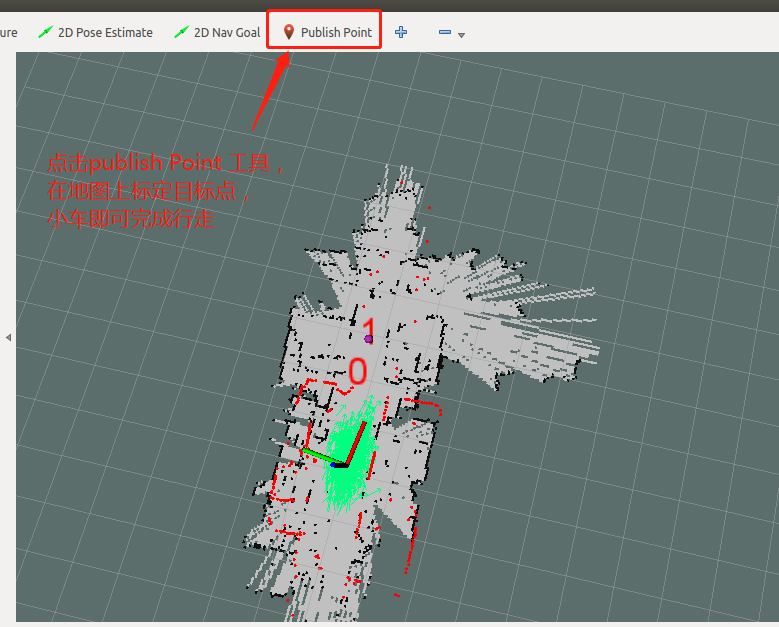
7.点击 Publish Point,在地图上依次打点,小车会自动计算路径,按照打点顺序依次到达目标点的位置。
第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
随机推荐
- Abp(net core)+easyui+efcore实现仓储管理系统——出库管理之七(五十六)
abp(net core)+easyui+efcore实现仓储管理系统目录 abp(net core)+easyui+efcore实现仓储管理系统--ABP总体介绍(一) abp(net core)+ ...
- Flutter——Dart Extension扩展方法的使用
dart的extension方法可以给已经存在的类添加新的函数,通过extension我们可以封装一些常用方法,提高开发效率. 例一:扩展String 给string添加一个log打印方法 exten ...
- PyQt(Python+Qt)学习随笔:QListWidget获取指定行对应项的item()方法
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 在列表部件中,可以通过item方法获取指定行对应的项,语法如下: QListWidgetItem i ...
- 安恒2018年三月月赛MISC蜘蛛侠呀
到处都是知识盲区hhh 下载了out.pcap之后,里面有很多ICMP包 看到ttl之后联想到西湖论剑里面的一道杂项题,无果 看WP知道可以使用wireshark的tshark命令提取流量包里面的文件 ...
- python中的万能密码
在php中,我们经常见到这样的语句 if(isset($_GET['id'])) { $id=$_GET['id']; //logging the connection parameters to a ...
- 2、tensorflow 变量的初始化
https://blog.csdn.net/mzpmzk/article/details/78636137 关于张量tensor的介绍 import tensorflow as tf import n ...
- 微信小程序template和组件
template主要是展示,主要是在调用的页面中定义.用import方式引入,然后去使用,通常是单独建立一个文件夹 去管理,文件夹有两个文件wxml和wxss,wxml中 可以定义多个template ...
- MySQL全备及备份文件删除脚本
1.数据库全备 #!/bin/shv_user="root"v_password="mysql"backup_date=`date +%Y%m%d%H%M` M ...
- 前端:css3的过渡与动画
一.css3过渡知识 (一).概述 1.CSS3过渡是元素从一种样式逐渐改变为另一种的效果. 2.实现过渡效果的两个要件: 规定把效果添加到那个css属性上. 规定效果时长 定义 ...
- Flink批处理读写Hive
import org.apache.flink.table.api.*; import org.apache.flink.table.catalog.hive.HiveCatalog; /** * @ ...