位置式PID和增量式PID
PID介绍
PID 是 Proportional(比例)、Integral(积分)、Differential(微分)的首字母缩写;是一种结合比例、积分和微分三种环节于一体的闭环控制算法。PID 控制的实质是对目标值和实际值误差进行比例、积分、微分运算后的结果用来作用在输出上。
比例 (P)
比例控制是最简单的一种控制方式,成比例的反应控制系统中输入与输出的偏差信号,只要偏差一旦产生,就立即产生控制的作用来减小产生的误差。比例控制器的输出与输入成正比关系,能够迅速的反应偏差,偏差减小的速度取决于比例系数 Kp,Kp 越大偏差减小的就越快,但是极易引起震荡;Kp 减小发生震荡的可能性减小,但是调节的速度变慢,单纯的比例控制存在不能消除的静态误差,这里就需要积分来控制。
积分(I)
在比例控制环节产生了静态误差,在积分环节中,主要用于就是消除静态误差提高系统的无差度。积分作用的强弱,取决于积分时间常数 Ti,Ti 越大积分作用越弱,反之则越强。积分控制作用的存在与偏差 e(t) 的存在时间有关,只要系统存在着偏差,积分环节就会不断起作用,对输入偏差进行积分,使控制器的输出及执行器的开度不断变化,产生控制作用以减小偏差。在积分时间足够的情况下,可以完全消除静差,这时积分控制作用将维持不变。Ti 越小,积分速度越快,积分作用越强。积分作用太强会使系统超调加大,甚至使系统出现振荡。
微分(D)
微分环节的作用是反应系统偏差的一个变化趋势,也可以说是变化率,可以在误差来临之前提前引入一个有效的修正信号,有利于提高输出响应的快速性, 减小被控量的超调和增加系统的稳定性,虽然积分环节可以消除静态误差但是降低了系统的响应速度,所以引入微分控制器就显得很有必要,尤其是具有较大惯性的被控对象使用 PI 控制器很难得到很好的动态调节品质,系统会产生较大的超调和振荡,这时可以引入微分作用。在偏差刚出现或变化的瞬间,不仅根据偏差量作出及时反应(即比例控制作用),还可以根据偏差量的变化趋势(速度)提前给出较大的控制作用(即微分控制作用),将偏差消灭在萌芽状态,这样可以大大减小系统的动态偏差和调节时问,使系统的动态调节品质得以改善。微分环节有助于系统减小超调,克服振荡,加快系统的响应速度,减小调节时间,从而改善了系统的动态性能,但微分时间常数过大,会使系统出现不稳定。微分控制作用一个很大的缺陷是容易引入高频噪声,所有在干扰信号比较严重的流量控制系统中不宜引入微分控制作用。
PID框图
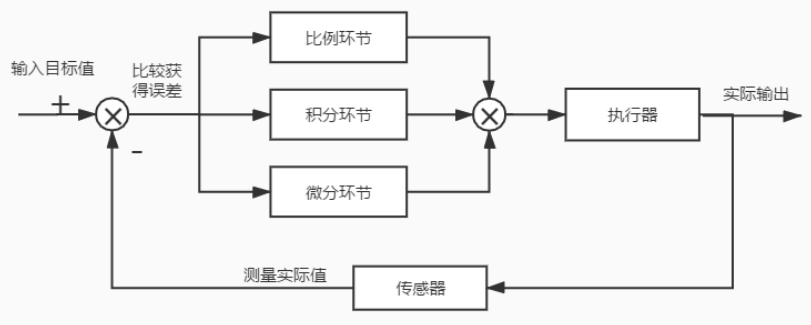
PID控制其实就是对偏差的控制过程;如果偏差为 0, 则比例环节不起作用,只有存在偏差时,比例环节才起作用;积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差;而微分信号则反应了偏差信号的变化规律,也可以说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的预知性。
PID结构体初始化
typedef struct
{
float target_val; //目标值
float actual_val; //实际值
float err; //定义偏差值
float err_last; //定义上一偏差值
float err_next; //定义下一偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
float integral; //定义积分值
}pid; /*位置式PID*/
float PID_realize(float temp_val)
{
/*计算目标值与实际值的误差*/
pid.err=pid.target_val-temp_val;
/*误差累积*/
pid.integral+=pid.err;
/*PID算法实现*/
pid.actual_val=pid.Kd*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pid.err_last);
/*误差传递*/
pid.err_last=pid.err;
/*返回当前实际值*/
return pid.actual_val;
} /*增量式PID*/
float PID_realize(float temp_val)
{
/*传入目标值*/
pid.target_val=temp_val;
/*计算目标值与实际值的误差*/
pid.err=pid.target_val-pid.actual_val;
/*PID算法实现*/
float increment_val=pid.Kp*(pid.err-pid.err_next)+pid.Ki*pid.err+pid.Kd*(pid.err-2*pid.err_next+pid.err_last);
/*累加*/
pid.actual_val+=increment_val;
/*误差传递*/
pid.err_last=pid.err_next;
pid.err_next=pid.err;
/*返回当前实际值*/
return pid.actual_val;
}
对比区别
• 增量式算法不需要对积分项累加,控制量增量只与近几次的误差有关,计算误差对控制量计算的影响较小。而位置式算法要对近几次的偏差的进行积分累加,容易产生较大的累加误差;
• 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作;而位置式的输出直接对应对象的输出,因此对系统影响较大;
• 增量式算法控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式算法适用于执行机构不带积分部件的对象,如电液伺服阀;
• 在进行 PID 控制时,位置式 PID 需要有积分限幅和输出限幅,而增量式 PID 只需输出限幅。
位置式 PID 优缺点:
优点:位置式 PID 是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k) 的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用;
缺点:每次输出均与过去的状态有关,计算时要对 e(k) 进行累加,运算工作量大。
增量式 PID 优缺点:
优点:1. 误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
2. 手动/自动切换时冲击小,便于实现无扰动切换。
3. 算式中不需要累加。控制增量 Δu(k) 的确定仅与最近 3 次的采样值有关。在速度闭环控制中有很好的实时性。
缺点:1. 积分截断效应大,有稳态误差;
2. 溢出的影响大。有的被控对象用增量式则不太好;
总结
比例:某时刻误差值
积分:所有时刻误差和
微分:某时刻误差变化率
位置式PID和增量式PID的更多相关文章
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- 位置式PID与增量式PID
//位置式PID float Kp; float Ki; float Kd; float eSum,e0,e1; float pid_control(float now,float target) { ...
- 增量式PID简单翻板角度控制
1.研究背景 随着电子技术.信息技术和自动控制理论技术的完善与发展,近来微型处理器在控制方面的应用也越来越多.随之逐渐渗透到我们生活的各个领域.如导弹导航装置,飞机上仪表的控制,网络通讯与数据传输,工 ...
- C 语言实现增量式PID
一直以来,pid都是控制领域的经典算法,之前尝试理解了很久,但还是一知半解,总是不得要领,昨天模仿着别人的代码写了一个增量式pid的代码. 我的理解就是pid其实就是对你设置的预定参数进行跟踪.在控制 ...
- 串联型PID,并联型PID与标准型PID简要说明
PID广泛应用于工业生产各个环节,然而对于不同PID结构会有一些差异,导致在调参时若按照常规的经验调试,结果将会有非常大的不同. 串联型PID(Serial PID) 串联型PID的三个环节由比例,积 ...
- 【转】位置式、增量式PID算法C语言实现
位置式.增量式PID算法C语言实现 芯片:STM32F107VC 编译器:KEIL4 作者:SY 日期:2017-9-21 15:29:19 概述 PID 算法是一种工控领域常见的控制算法,用于闭环反 ...
- 增量式pid和位置式PID参数整定过程对比
//增量式PID float IncPIDCalc(PID_Typedef* PIDx,float SetValue,float MeaValue)//err»ý·Ö·ÖÀë³£Êý { PIDx-& ...
- 增量式PID的matlab实现
首先,增量式PID的实现公式: 式中 Δe(k)=e(k)-e(k-1) 进一步可以改写成 式中 . . 为了便于理解,也可写成: 式中e(k)为第k次采样时的设定值与实际值的差,e(k-1 ...
- 外置式与增量式PID模板程序(51单片机c语言)
外置式PID模板 #define MuBiaoCS 0 //目标常数 #define CHang_aCS 0 //比例常数 #define CHang_bCS 0 //积分常数 #define CHa ...
- T12焊台控制器制作教程 | T12烙铁 | PID增量式算法恒温控制 | 运算放大器-热电偶电压采集 | OLED屏幕显示-SPI通信 | 旋转编码器EC11用户操作
前言 购买T12烙铁的相关配件已经1年多了,期间也尝试了一些开源的T12控制器,但都没有成功,要么是配套资料少,要么是英文的,其中51和arduino的居多,STM32的较少.求人不如求己,索性自己开 ...
随机推荐
- startActivity 新开一个Activity
private void startActivity(Intent intent) { Context ctx = ApplicationController.getTopActivity(); if ...
- [JavaScript]关于prototype继承
When it comes to inheritance, JavaScript only has one construct: objects. Each object has a private ...
- firefox用于web安全测试的插件[转]
备份用 目录[-] firebug 油猴子Greasemonkey JavaScript Debugger flagfox tamper data live http headers modify h ...
- VS Code:4个中文乱码问题及解决方法-转载
https://www.jianshu.com/p/6a2c21cc07bb 1. 背景 凡是编程软件,特别是国外的软件,都有或多或少的中文乱码问题(毕竟程序都是用英文写的).现提出VS Co ...
- 工程师突击:SAP ABAP实用程序开发攻略.pdf
工程师突击:SAP ABAP实用程序开发攻略.pdf 有需要的联系 wx :erpworld
- centos7 添加自定义程序为系统服务
centos6版本的系统服务是/etc/init.d启动脚本的方式,centos7采用强大的systemctl来管理系统服务,大幅提供了系统服务的运行效率,但是服务的配置和以前版本完全不同,这是很大的 ...
- JS 将伪数组转换成数组
在 JS 中,伪数组 是非常常见的,它也叫 类数组.伪数组可能会给 JS 初学者带来一点困扰. 本文将详细讲解 什么是伪数组,以及分别在 ES5 和 ES6 中将伪数组转换成真正的数组 . 什么是伪数 ...
- git 代码强制回滚操作整理(线上线下一起)
线上代码强制回滚操作,这边整理了一下 1.到线上 执行 git reset --hard xxxxxxxxxxx(更新前的一个版本)2.本地执行 和上面一样 git reset --hard xxxx ...
- window.onerror的总结
// a.js window.onerror = function (message, url, line, column, error) { console.log('log---onerror:: ...
- asp.net mvc api swagger 配置
1.安装插件 Swashbuckle(版本5.6.0) 和 Swagger.Net.UI(版本1.1.0) 2.SwaggerNet类中注释掉一下代码: using System; using Sys ...