UVA 221 城市化地图(离散化思想)
题意:
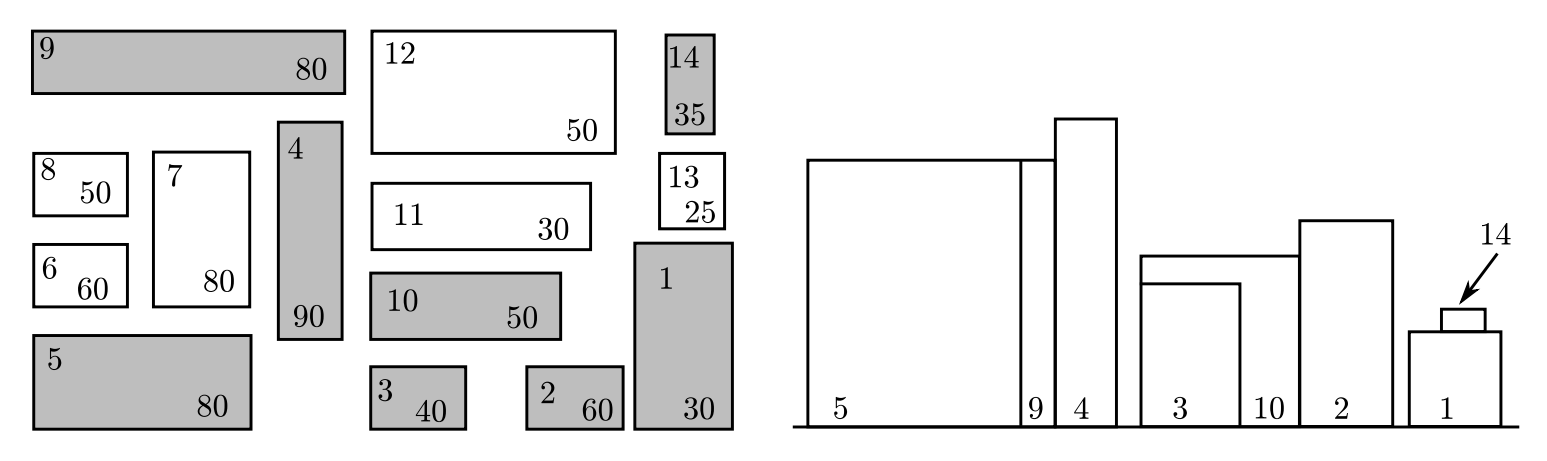
给出若干个栋楼俯视图的坐标和面积,求从俯视图的南面(可以视为正视图)看过去到底能看到多少栋楼。
输入第一个n说明有n栋楼,然后输入5个实数(注意是实数),分别是楼的左下角坐标(x,y), 然后楼的x方向的宽度,y方向的深度,还有楼的高度。
按横坐标,横坐标同样按纵坐标排序输出所有能看到的楼。
分析:
先记录一个一开始就想错的做法:
以为只要把x 和 width放大到到足够大(例如10000倍,倍数越高精度越高),然后排序填充一下数轴就可以,就可以解决x坐标是小数的问题。但这样打了一下,发现第一计算速度很慢(放大后n倍计算量也同时放大n^2倍), 第二是无法处理覆盖与重叠的部分, 只会保留数轴中最大的部分, 无法保留在高楼南边的矮楼,第三这种做法也是错误的,只要他是连续的,就算放大也不能完全保证算法正确性。
正确的做法应该是将正视图x轴离散化:
首先这题楼的可见性可以简化成建筑物南面的墙的可见性(可在上图感受一下),所以输入的深度这个属性是没有用的,可以用%*lf(在键盘上读取但不保存)在输入时忽略掉。
接下来就是离散化的核心,提取正视图x轴有用的点,先无限个x的取值化为有限的关键点。
——按每栋楼的x的最左边和最右边看成区间的两个端点, 然后将整张图分为多个区间, 然后可以保证每个区间整片区间一定包含其中一栋楼, 只要判断这个区间包含的楼是否可见即可。
分割如下:

可以观察, 每个区间的任何一个点都拥有同样的性质,即无论从区间的哪一个点观察,都可得到同样的结果。
不妨取每个区间的中点作为关键点
可以先按输出要求遍历所有的楼,每栋楼再遍历所有的区间,然后再判断能否被看见。
如何判断是否能看见?
看见只要满足两个条件:
设这栋楼为A。
①A在其中一个区间内(或者说忽略高度条件,在这个区间的中点能看见A), 即 楼的最左端 <=该区间中点 && 楼的最右端>=该区间中点
②该区间内比A的y坐标小的楼都比A矮。(如果在A的南面有比他高的,那么自然看不见A)
这个点又可以判断为两个条件
1.是否有楼在这个区间内(判断方法同①,所以这种需要重复判断的条件最好写成一个函数)
2.该楼是否比A矮(判断一下高度即可)
此外这题还涉及一个STL函数,unique,它通常使用在sort后的数组, 将不同的元素保留在数组前面, 然后那些重复元素移到后面。原型可以为unique(v.begin(),v.end());
如果想更深入了解离散化思想可以看看matrix67的博客——http://www.matrix67.com/blog/archives/108
- #include<bits/stdc++.h>
- using namespace std;
- struct Bd
- {
- double x,y, width, high;
- int num;
- bool operator < (const Bd& rhs)const{
- return x<rhs.x ||(x==rhs.x && y < rhs.y);
- }
- }b[];
- int n;
- bool can_see(int i, int mx)//判断第i栋楼在不在中点上
- {
- return b[i].x <= mx && (b[i].x + b[i].width >= mx);
- }
- bool visible(int i, int mx)//包含高度条件,在中点能不能看到第i栋楼
- {
- if(!can_see(i, mx)) return false;
- for(int k = ; k < n;k++)
- {
- if(b[k].y < b[i].y && b[k].high >= b[i].high && can_see(k,mx)) return false;
- }
- return true;
- }
- int main()
- {
- #if LOCAL
- freopen("1.txt","r",stdin);
- #endif // LOCAL
- int kase = ;
- while(scanf("%d", &n) && n)
- {
- double w[];
- for(int i = ; i < n ; i++)
- {
- double tx, ty, tw, th;
- scanf("%lf %lf %lf %*lf %lf", &tx, &ty, &tw, &th);
- b[i].x = tx;
- b[i].y = ty;
- b[i].width = tw;
- b[i].high = th;
- b[i].num = i+;
- w[i*] = tx;
- w[i*+] = tx + tw;
- }
- sort(b,b+n);
- sort(w,w+*n);
- int m = unique(w,w+*n) - w;
- if(kase != ) printf("\n");
- printf("For map #%d, the visible buildings are numbered as follows:\n%d",kase++, b[].num);//第一栋楼在左下角,肯定能看到
- for(int i = ; i < n; i++)
- {
- int is = ;
- for(int j = ; j < m - ; j++)
- {
- if(visible(i,(w[j]+w[j+])/))
- {
- is = ;
- break;
- }
- }
- if(is) printf(" %d", b[i].num);
- }
- printf("\n");
- }
- }
UVA 221 城市化地图(离散化思想)的更多相关文章
- UVa 221 Urban Elevations 城市正视图 离散化初步 无限化有限
转载请注明: 仰望高端玩家的小清新 http://www.cnblogs.com/luruiyuan/ 题目大意: 题目传送门:UVa 221 Urban Elevations 给出城市中建筑物的x, ...
- HDU5124:lines(线段树+离散化)或(离散化思想)
http://acm.hdu.edu.cn/showproblem.php?pid=5124 Problem Description John has several lines. The lines ...
- UVa 221城市正视图(离散化)
https://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&page=show_problem& ...
- UVA 221 - Urban Elevations(离散化)!!!!!!
题意:给出一张俯视图.给出N个建筑物的左下标,长度,宽度,高度.现在求,从南面看,能看到那些建筑? Sample Input 14 160 0 30 60 30 125 0 32 28 60 95 0 ...
- UVa 221 (STL 离散化) Urban Elevations
题意: 作图为n个建筑物的俯视图,右图为从南向北看的正视图,按从左往右的顺序输出可见建筑物的标号. 分析: 题中已经说了,要么x相同,要么x相差足够大,不会出现精度问题. 给这n个建筑物从左往右排序, ...
- 【紫书】Urban Elevations UVA - 221 离散化
题意:给你俯视图,要求依次输出正视图中可以看到的建筑物 题解:任意相邻的x间属性相同,所以离散化. 坑:unique只能对数组用.下标易错 list不能找某元素的next.用了个很麻烦的处理 数组: ...
- 此坑待填 离散化思想和凸包 UVA - 10173 Smallest Bounding Rectangle
Smallest Bounding Rectangle Given the Cartesian coordinates of n(>0)2-dimensional points, write a ...
- hdu 2771(uva 12171) Sculpture bfs+离散化
题意: 给出一些边平行于坐标轴的长方体,这些长方体可能相交.也可能相互嵌套.这些长方体形成了一个雕塑,求这个雕塑的整体积和表面积. 题解: 最easy想到直接进行bfs或者dfs统计,但此题的麻烦之处 ...
- UVA 10891 区间DP+博弈思想
很明显带有博弈的味道.让A-B最大,由于双方都采用最佳策略,在博弈中有一个要求时,让一方的值尽量大.而且由于是序列,所以很容易想到状态dp[i][j],表示序列从i到j.结合博弈中的思想,表示初始状态 ...
随机推荐
- 第四篇(那些JAVA程序BUG中的常见单词)
xxx cannot be resolved to a variable xxx无法解析为变量 resolve 解析
- linux php5.6 提示 could not find driver
1.进入在PHP源码包中进入ext/pdo_mysql # wget http://pecl.php.net/get/PDO_MYSQL-1.0.2.tgz 2.然后是解压缩. # tar -zxvf ...
- springMVC RedirectAttributes
@Controller public class TestController { @RequestMapping("/redirectDemo") public String r ...
- pytest的参数化
参数化有两种方式: 1. @pytest.mark.parametrize 2.利用conftest.py里的 pytest_generate_tests 1中的例子如下: @pytest.mark. ...
- linux下创建用户及组
linux下创建用户及组: 1.创建组 groupadd 组名 2.创建用户,并将用户添加到组 useradd 用户名 -g 组名 3.更改用户的密码 password 用户名 4.修改目录 ...
- 【开源】基于EF6+MVC5+API2+Easyui1.4.5+Easyui管理模板开发的管理系统
经过近一步完善调整,现将本系统源码正式开放,定名为:EasyuiAdminFramework,另外EasyuiAdminTemplate及EasyuiFlatTheme也一并开源 项目主页:http: ...
- VS Code 设置取消打开文件目录的自动定位跟踪功能。
文件-->首选项-->设置-->在搜索栏中搜索:explorer.autoReveal; 去掉勾选即可.
- Java开发笔记(九十三)深入理解字节缓存
前面介绍了文件通道的读写操作,其中用到字节缓存ByteBuffer,它是位于通道内部的存储空间,也是通道唯一可用的存储形式.ByteBuffer有两种构建方式,一种是调用静态方法wrap,根据输入的字 ...
- Spark学习之基于MLlib的机器学习
Spark学习之基于MLlib的机器学习 1. 机器学习算法尝试根据训练数据(training data)使得表示算法行为的数学目标最大化,并以此来进行预测或作出决定. 2. MLlib完成文本分类任 ...
- LoadRunner脚本回放与设置
一.runtime setting 1.迭代次数设置与迭代步长(循环间隔时间) 2.日志打印设置 二.实时观看回放 1.动态回放与静态回放(静态回放时,不会有逐行高亮显示:动态回放时高亮显 ...