周博磊老师强化学习纲领笔记第二课:MDP,Policy Iteration与Value Iteration
gym环境:FrozenLake-v0:http://gym.openai.com/envs/FrozenLake-v0/
代码来自:周博磊老师的GitHub:https://github.com/cuhkrlcourse/RLexample/tree/master/MDP
环境如下:
SFFF (S: starting point, safe)
FHFH (F: frozen surface, safe)
FFFH (H: hole, fall to your doom)
HFFG (G: goal, where the frisbee is located)
- 环境解释:冰封湖问题,智能体控制角色在网格世界中的移动。网格中的某些冰面是可行走的,而某些冰面会导致主体掉入水中。另外,智能体的移动方向是不确定的,并且仅部分取决于所选方向。(也就是如果你想向上走,你选择的动作是向上走,但是实际不一定向上走,可能会发生偏移,向左,或向右,三个方向的概率是等价的,也就是都是0.3333)代理商因找到通往目标砖的可步行路径而获得奖励。
# env.nA, 表示每个可以选择的动作的个数为4,动作空间
# env.nS, 表示状态的总数为16,状态空间
# env.P[state][a], 表示在状态state下执行动作a,返回的是prob概率, next_state下一个状态,reward奖励, done是否结束
Policy Iteration:
目标:寻找一个最后策略:\(\pi\)
解决方法:不断的迭代Bellman expectation backup(下面的公式5)
Policy Iteration algorithm:
At each iteration t+1
update \(v_{t+1}(s)\) from \(v_t(s')\) for all states \(s \in S\) where \(s'\) is a successor states of s
\(v_{t+1}(s)=\sum_{a \in A}\pi(a|s)[R(s,a)+\gamma\sum_{s'\in S}P(s'|s,a)v_t(s')]\)
Convergence: \(v_1\to v_2\to ...\to v^\pi\)
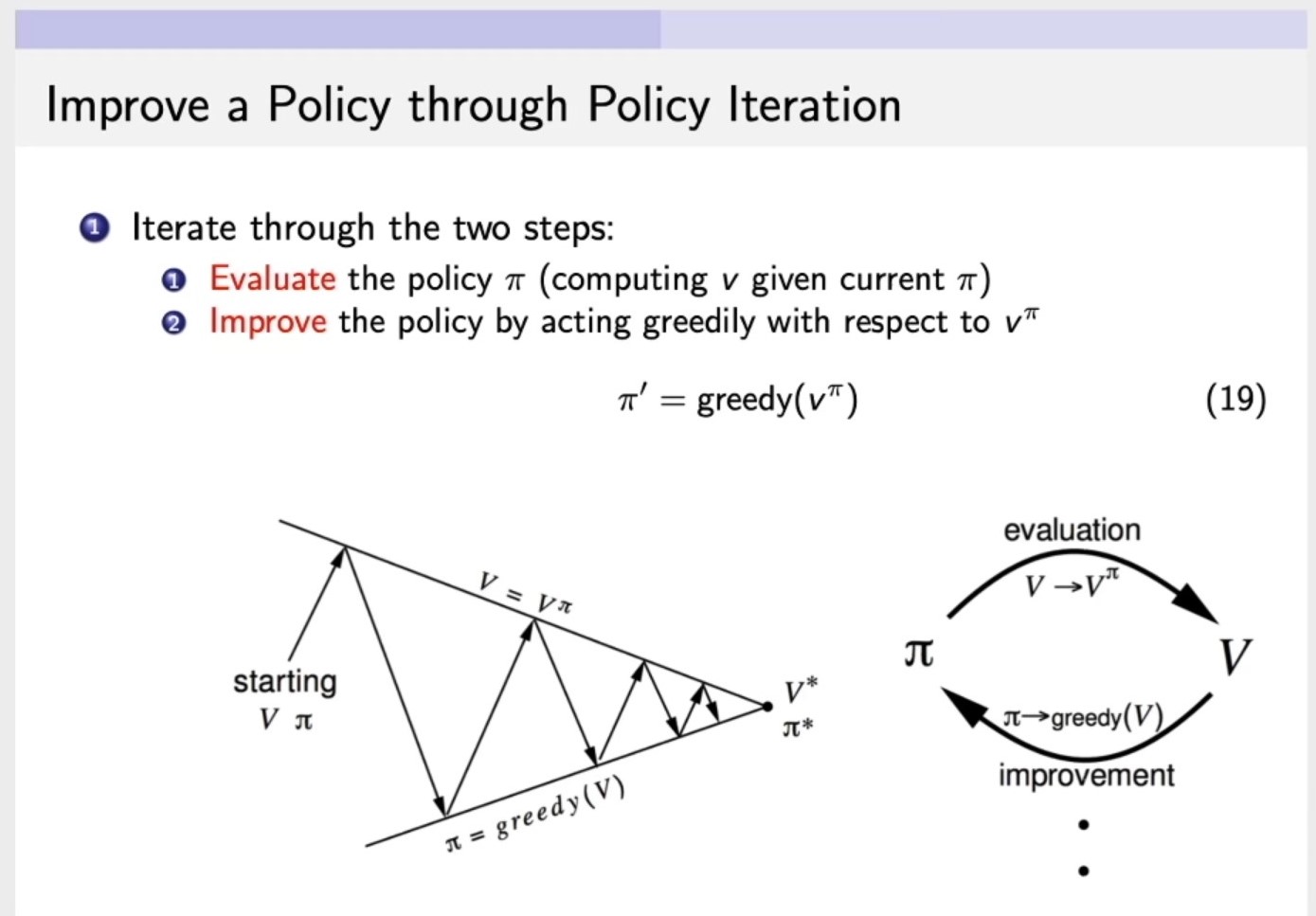
Iterate through the two steps:
Evaluatethe policy \(\pi\) (computing \(v\) given current \(\pi\)),第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值。Improvethe policy by acting greedily wirh respect to \(v^\pi\),第二步:改进策略policy,通过对 \(v^\pi\) (第一步通过\(\pi\)求解出来的\(v\))采取贪心的算法,来改进策略policy。
Policy Iteration:
"""
Solving FrozenLake environment using Policy-Iteration.
Adapted by Bolei Zhou for IERG6130. Originally from Moustafa Alzantot (malzantot@ucla.edu)
"""
import numpy as np
import gym
RENDER=False
GAMMA=1.0
# 计算策略policy跑一个回合的奖励:输入环境,策略以及衰减因子,跑一个回合,返回奖励值
def run_episode(env, policy, gamma = GAMMA, render = False):
""" Runs an episode and return the total reward """
obs = env.reset()
# 重置环境
total_reward = 0
step_idx = 0
while True:
if render:
env.render()
# 如果想看环境渲染的话,就设置输入的render为True,render默认为False
obs, reward, done , _ = env.step(int(policy[obs]))
total_reward += (gamma ** step_idx * reward)
step_idx += 1
if done:
break
return total_reward,step_idx
# 计算策略policy的平均奖励
def evaluate_policy(env, policy, gamma = GAMMA, n = 100):
scores = [run_episode(env, policy, gamma, render=RENDER) for _ in range(n)]
return np.mean(scores)
# 第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值
def compute_policy_v(env, policy, gamma=GAMMA):
""" Iteratively evaluate the value-function under policy.
Alternatively, we could formulate a set of linear equations in iterms of v[s]
and solve them to find the value function.
"""
v = np.zeros(env.env.nS)
eps = 1e-10
# 将精度收敛到eps的时候,就停止更新
while True:
prev_v = np.copy(v)
for s in range(env.env.nS):
policy_a = policy[s]
v[s] = sum([p * (r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][policy_a]])
if (np.sum((np.fabs(prev_v - v))) <= eps):
# value converged
break
return v
# 第二步:改进策略policy,通过对old_policy_v采取贪心的算法,来改进策略policy
def extract_policy(v, gamma = GAMMA):
""" Extract the policy given a value-function """
policy = np.zeros(env.env.nS)
for s in range(env.env.nS):
q_sa = np.zeros(env.env.nA)
for a in range(env.env.nA):
q_sa[a] = sum([p * (r + gamma * v[s_]) for p, s_, r, _ in env.env.P[s][a]])
policy[s] = np.argmax(q_sa)
return policy
# policy_iteration的主要算法
def policy_iteration(env, gamma = GAMMA):
""" Policy-Iteration algorithm """
policy = np.random.choice(env.env.nA, size=(env.env.nS)) # initialize a random policy
max_iterations = 200000
gamma = GAMMA
for i in range(max_iterations):
old_policy_v = compute_policy_v(env, policy, gamma)
# 第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值
new_policy = extract_policy(old_policy_v, gamma)
# 第二步:改进策略policy,通过对old_policy_v采取贪心的算法,来改进策略policy
if (np.all(policy == new_policy)):
# 如果policy已经不在发生改变了,也就是收敛了,无法提升了
print ('Policy-Iteration converged at step %d.' %(i+1))
break
policy = new_policy
return policy
if __name__ == '__main__':
env_name = 'FrozenLake-v0' # 'FrozenLake4x4-v0'
env = gym.make(env_name)
optimal_policy = policy_iteration(env, gamma = GAMMA)
scores = evaluate_policy(env, optimal_policy, gamma = GAMMA)
print('Average scores = ', np.mean(scores))
print(optimal_policy)
total,step=run_episode(env,optimal_policy,GAMMA,True)
print("一共走了:",step)
Value Iteration:
目标:寻找一个最后策略:\(\pi\)
解决方法:不断的迭代Bellman optimality backup(下面的公式5)
Value Iteration algorithm:
initialize \(k =1\) and \(v_0(s)=0\) for all states \(s\)
For \(k=1\) : \(H\)
for each state \(s\)
\(q_{k+1}(s,a)=R(s,a)+\gamma\sum_{s' \in S}P(s'|s,a)v_k(s')\)
\(v_{k+1}(s)=max_aq_{k+1}(s,a)\)
\(k \leftarrow k+1\)
To retrieve the optimal policy after the value iteration:
\(\pi(s)=argmax_a[R(s,a)+\gamma\sum_{s' \in S}P(s'|s,a)v_{k+1}(s')]\)
Value Iteration:
"""
Solving FrozenLake environment using Value-Itertion.
Updated 17 Aug 2020
"""
import numpy as np
import gym
from gym import wrappers
from gym.envs.registration import register
def run_episode(env, policy, gamma = 1.0, render = False):
""" Evaluates policy by using it to run an episode and finding its
total reward.
args:
env: gym environment.
policy: the policy to be used.
gamma: discount factor.
render: boolean to turn rendering on/off.
returns:
total reward: real value of the total reward recieved by agent under policy.
"""
obs = env.reset()
total_reward = 0
step_idx = 0
while True:
if render:
env.render()
obs, reward, done , _ = env.step(int(policy[obs]))
total_reward += (gamma ** step_idx * reward)
step_idx += 1
if done:
break
return total_reward
def evaluate_policy(env, policy, gamma = 1.0, n = 100):
""" Evaluates a policy by running it n times.
returns:
average total reward
"""
scores = [
run_episode(env, policy, gamma = gamma, render = False)
for _ in range(n)]
return np.mean(scores)
def extract_policy(v, gamma = 1.0):
""" Extract the policy given a value-function """
policy = np.zeros(env.env.nS)
for s in range(env.env.nS):
q_sa = np.zeros(env.action_space.n)
for a in range(env.action_space.n):
for next_sr in env.env.P[s][a]:
# next_sr is a tuple of (probability, next state, reward, done)
p, s_, r, _ = next_sr
q_sa[a] += (p * (r + gamma * v[s_]))
policy[s] = np.argmax(q_sa)
return policy
def value_iteration(env, gamma = 1.0):
""" Value-iteration algorithm """
v = np.zeros(env.env.nS) # initialize value-function
max_iterations = 100000
eps = 1e-20
for i in range(max_iterations):
prev_v = np.copy(v)
q_sa=np.zeros(env.env.nA)
for s in range(env.env.nS):
for a in range(env.env.nA):
q_sa[a] = sum([p*(r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][a]])
v[s] = max(q_sa)
if (np.sum(np.fabs(prev_v - v)) <= eps):
print ('Value-iteration converged at iteration# %d.' %(i+1))
break
return v
if __name__ == '__main__':
env_name = 'FrozenLake-v0' # 'FrozenLake4x4-v0'
env = gym.make(env_name)
gamma = 1.0
optimal_v = value_iteration(env, gamma);
policy = extract_policy(optimal_v, gamma)
policy_score = evaluate_policy(env, policy, gamma, n=1000)
print('Policy average score = ', policy_score)
print(policy)
Policy Iteration和Value Iteration的区别:
①:Policy iteration主要包括两部分:policy evaluation+policy improvement,这两部分反复迭代,直到收敛。初始化一个策略policy,对策略policy进行价值评估,然后再根据价值,重新制定最优策略,反复迭代。
②:Value iteration主要包括两部分:finding optimal value function+one policy extraction,寻找一个最优的价值函数,然后根据价值函数,指定最优的策略,因为价值函数是最优的,所以策略也是最优的。
③:策略迭代的收敛速度更快一些,在状态空间较小时,最好选用策略迭代方法。当状态空间较大时,值迭代的计算量更小一些。
| Problem | Bellman Equation | Algorithm |
|---|---|---|
| Prediction | Bellman Expectation Equation | Iterative Policy Evaluation |
| Control | Bellman Expectation Equation | Policy Iteration |
| Control | Bellman Optimality Equation | Value Iteration |
Bellman expectation Equation:(当前状态跟未来状态的一个关联,\(G_t\)展开的首项是\(R_{t+1}\))
\tag 1
\]
\tag 2
\]
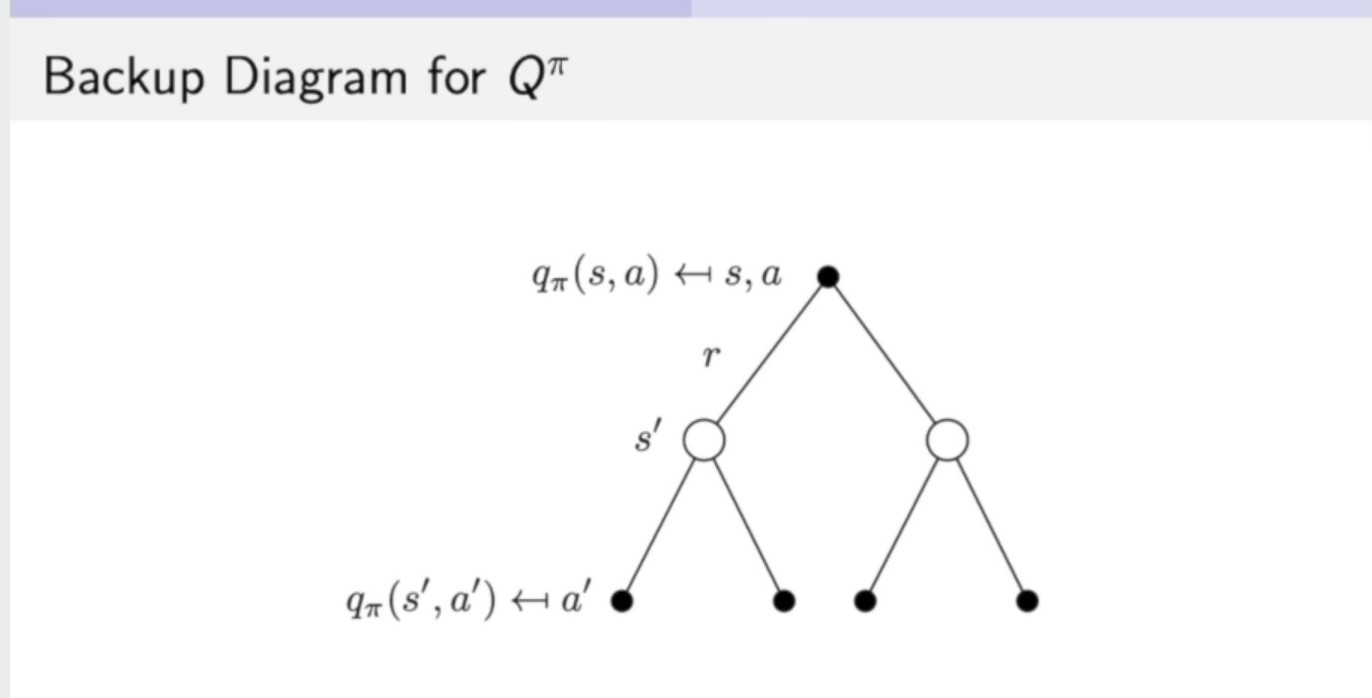
(3)式和(4)式象征着价值函数和q函数之间的关联
\tag 3
\]
\tag 4
\]
(4)式带入到(3)式中得到(象征着当前状态的价值与未来状态的价值之间的一个关联)

\tag 5
\]
(3)式带入到(4)式中得到(象征着当前时刻的q函数与未来时刻的q函数之间的一个关联):
\tag 6
\]
公式(5)进行backup后得到Bellman expectation backup:
\tag 7
\]
上式转换成马尔可夫奖励过程的形式:
\tag 8
\]
Bellman Optimality Equation:
\tag 9
\]
\tag {10}
\]
(10)式带入到(9)式得到:
\tag {11}
\]
(9)式带入到(10)式得到:
\tag {12}
\]
公式(4)进行backup后得到 Bellman Optimality backup:
\tag {13}
\]
周博磊老师强化学习纲领笔记第二课:MDP,Policy Iteration与Value Iteration的更多相关文章
- 李宏毅强化学习完整笔记!开源项目《LeeDeepRL-Notes》发布
Datawhale开源 核心贡献者:王琦.杨逸远.江季 提起李宏毅老师,熟悉强化学习的读者朋友一定不会陌生.很多人选择的强化学习入门学习材料都是李宏毅老师的台大公开课视频. 现在,强化学习爱好者有更完 ...
- 强化学习读书笔记 - 02 - 多臂老O虎O机问题
# 强化学习读书笔记 - 02 - 多臂老O虎O机问题 学习笔记: [Reinforcement Learning: An Introduction, Richard S. Sutton and An ...
- 强化学习读书笔记 - 05 - 蒙特卡洛方法(Monte Carlo Methods)
强化学习读书笔记 - 05 - 蒙特卡洛方法(Monte Carlo Methods) 学习笔记: Reinforcement Learning: An Introduction, Richard S ...
- 强化学习读书笔记 - 06~07 - 时序差分学习(Temporal-Difference Learning)
强化学习读书笔记 - 06~07 - 时序差分学习(Temporal-Difference Learning) 学习笔记: Reinforcement Learning: An Introductio ...
- 强化学习读书笔记 - 13 - 策略梯度方法(Policy Gradient Methods)
强化学习读书笔记 - 13 - 策略梯度方法(Policy Gradient Methods) 学习笔记: Reinforcement Learning: An Introduction, Richa ...
- 强化学习读书笔记 - 12 - 资格痕迹(Eligibility Traces)
强化学习读书笔记 - 12 - 资格痕迹(Eligibility Traces) 学习笔记: Reinforcement Learning: An Introduction, Richard S. S ...
- 强化学习读书笔记 - 11 - off-policy的近似方法
强化学习读书笔记 - 11 - off-policy的近似方法 学习笔记: Reinforcement Learning: An Introduction, Richard S. Sutton and ...
- 强化学习读书笔记 - 10 - on-policy控制的近似方法
强化学习读书笔记 - 10 - on-policy控制的近似方法 学习笔记: Reinforcement Learning: An Introduction, Richard S. Sutton an ...
- 强化学习读书笔记 - 09 - on-policy预测的近似方法
强化学习读书笔记 - 09 - on-policy预测的近似方法 参照 Reinforcement Learning: An Introduction, Richard S. Sutton and A ...
- 强化学习复习笔记 - DEEP
Outline 激活函数 使用逼近器的特点: 较少数量的参数表达复杂的函数 (计算复杂度) 对一个权重的调整可以影响到很多的点 (泛化能力) 多种特征表示和逼近器结构 (多样性) 激活函数 Sigmo ...
随机推荐
- Zabbix“专家坐诊”第183期问答汇总
问题一 Q:老师,请问一下zabbix采集的数据怎么过滤,获取数据是nottime=20:30 notafter=3,怎么过滤出netafter=3 ?谢谢. A:过滤器设置如下图. 问题二 Q:大佬 ...
- 来自 AI Secure 实验室的 LLM 安全排行榜简介
近来,LLM 已深入人心,大有燎原之势.但在我们将其应用于千行百业之前,理解其在不同场景下的安全性和潜在风险显得尤为重要.为此,美国白宫发布了关于安全.可靠.可信的人工智能的行政命令; 欧盟人工智能法 ...
- python的软连接的操作方法
详细:切换python的版本 cd /usr/bin/ ls -l python* sudo rm -rf python sudo ln -s /usr/bin/python3.7 /usr/bin/ ...
- 基于Python的 如何检查字符串输入是否为数字
一 概念 这种有很多常用的方法,这里只介绍一种常用的方法是使用正则表达式来匹配数字的模式.通过定义一个匹配数字的正则表达式,然后使用re模块中的search()方法来进行匹配. 二 例子: 下面是一个 ...
- 全面解析Android之ANR日志
不论从事安卓应用开发,还是安卓系统研发,应该都遇到应用无响应(简称ANR)问题,当应用程序一段时间无法及时响应,则会弹出ANR对话框,让用户选择继续等待,还是强制关闭.本文将带你全面解析Android ...
- FTP的配置和管理
实验环境: 两台windows servers 一台已经配置了FTP服务器,IP为192.168.1.220,vmnet1 一台作为客户端测试,IP为192.168.1.138,vmnet1 一:FT ...
- 【Leetcode】300. 最长递增子序列
题目(链接) 给你一个整数数组nums,找到其中最长严格递增子序列的长度. 子序列是由数组派生而来的序列,删除(或不删除)数组中的元素而不改变其余元素的顺序.例如,[3,6,2,7]是数组[0,3,1 ...
- 《.NET内存管理宝典 》(Pro .NET Memory Management) 阅读指南 - 第2章
本章勘误: 暂无,等待细心的你告诉我哦. 本章注解: 出处:2.2.6 Windows内存布局 原文: segment heap:用于Universal Windows Platform程序,它提供了 ...
- SQLServer递归触发器在KES中的一次改造分析
文章概要: 某项目将数据从 SQLSERVER 迁移到 KES.其中SQLSERVER中触发器用到了 TRIGGER_NESTLEVEL() 函数,KES并不能直接支持该函数. 起初在分析该问题时想复 ...
- HashMap对key或value进行排序--Java--小白必懂2
HashMap对key进行排序 public static void main (String[]args){ HashMap<String, Integer> map = new Has ...