【论文阅读】Optimization-Based Collision Avoidance
前言与参考
论文地址:https://ieeexplore.ieee.org/document/9062306
文章是2018年5月提出的,但是到了2020年才发表到ACC 所以时间轴上写的是2021年5月刊的ACC,算是近年来把凸优化来表示这个的开端(当然有更早的) 然后带起了一波热度的感觉。这篇文章自身也有 74cites了
我的主要是顺整个论文而不是只提取一个小部分... 虽然这样子干起来 套娃现象非常严重。基于优化的方法主要是:如何将碰撞问题转换成一个优化约束问题,然后用数值优化的方法去做求解。
基础知识
避障问题是一个NP-hard问题:
P问题、NP问题、NP完全问题和NP难问题 - 知乎 (zhihu.com)
也就是NP问题能约化到他,但是他并不是一个NP问题
I 介绍
对于基于优化计算轨迹的最大挑战在于:如何合适的表示collision avoidance,一般碰撞问题是非凸的并且很难进行求解。当然也有很多论文指出了应该怎样去求解这个碰撞问题
碰撞约束被近似成一个线性约束,但是很难去度量这个近似的误差 [10]
部分文章直接将这个问题下的机器人看做一个点物体,所以并不适用于多维度的机器人 比如机械臂
如果将障碍物看做多面体,那么碰撞约束通常会转成一个整数变量[16]
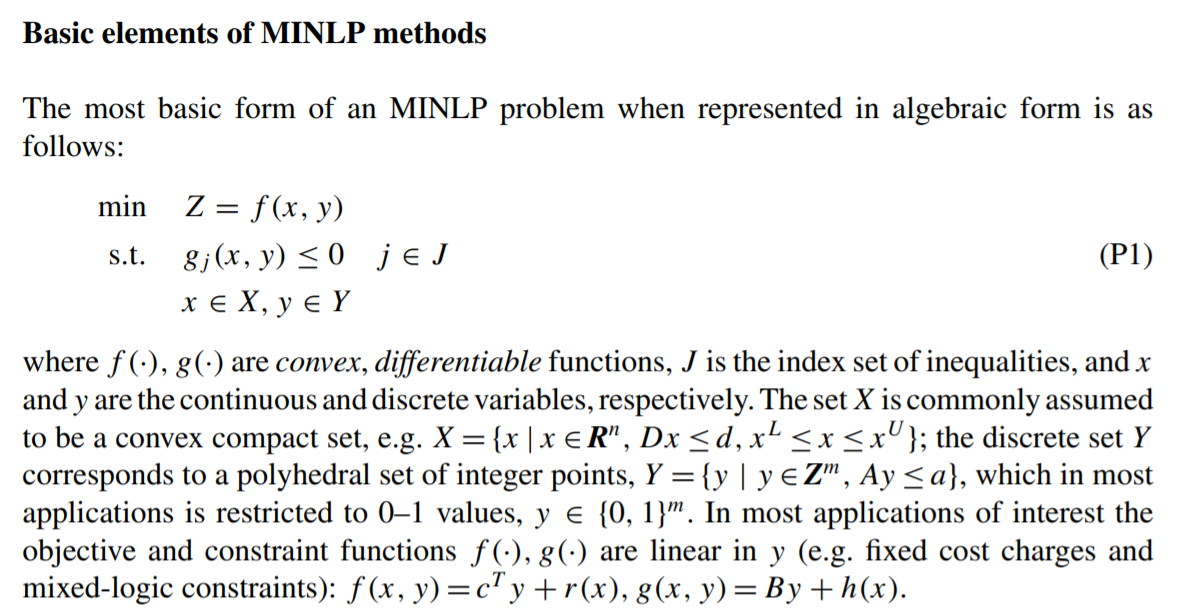
the discrete set Y corresponds to a polyhedral set of integer points, \(Y=\left\{y \mid y \in \boldsymbol{Z}^{m}, A y \leq a\right\}\), which in most applications is restricted to 0–1 values, \(y ∈ \{0, 1\}^m\).
[16] Grossmann, Ignacio E. "Review of nonlinear mixed-integer and disjunctive programming techniques." Optimization and engineering 3.3 (2002): 227-252.
所以以上这三种reformulation对于凸限制下的线性系统来说非常具有吸引力,因为在这样的条件下 混合整数优化问题可以被解决。一般来说当设计实时性系统时,整数变量应该避免在非线性系统中优化问题中出现
在本文中,我们主要研究:机器人在n维空间内避障运动,提出模型:建模避障问题约束,并避免之前说到的这三个问题出现
机器人和障碍物都描述成凸集,例如polytopes或ellipsoids(椭圆体) 然后碰撞问题就可以exactly and non conservatively reformulated 成一系列平滑的非凸限制
主要是使用strong duality of convex optimization在两个凸集间reformulating距离函数还有第二种方法是建立在signed distance,也就是带符号的距离值,这样就能表达物体之间的交叉现象问题。这种情况下也能计算即使在要碰撞时 最小损坏程度的碰撞轨迹是怎样的
这里的handle in general是指泛化性问题还是说不能很容易求解
较难求解
非凸限制的平滑是指什么?a set of smooth non convex constraints
这里的整数约束主要在了谁的身上?为什么将障碍物看成多面体后,限制会使用整数?
杰哥:可能是和哪条边碰
吴院:也就是说在表达障碍物这件事上是整数约束给出的 因为渲染像素,mesh值等都不能切半(分辨率确定情况下);还有一些东西,比如说特征点的位置的优化,如果说是一定要在图像当中的像素的话,那就是一个整数规划问题,但是现在比如说VINS等等,都是用的浮点数去去去计算的,只是这样算出来的,对于图像来讲它没有意义。
参考16:离散集 Y 对应于整数点的多面体集
- 具体可能需要再找一下,哪几篇论文是使用这个方法 表现如何的
好像是M个障碍物,M整数约束在障碍物数量上
A. Related work
作者挺刚的,一上来就是:in this article, we do not review, or compare, optimization-based collision avoidance methods with alternative approaches, such as those based on xxx
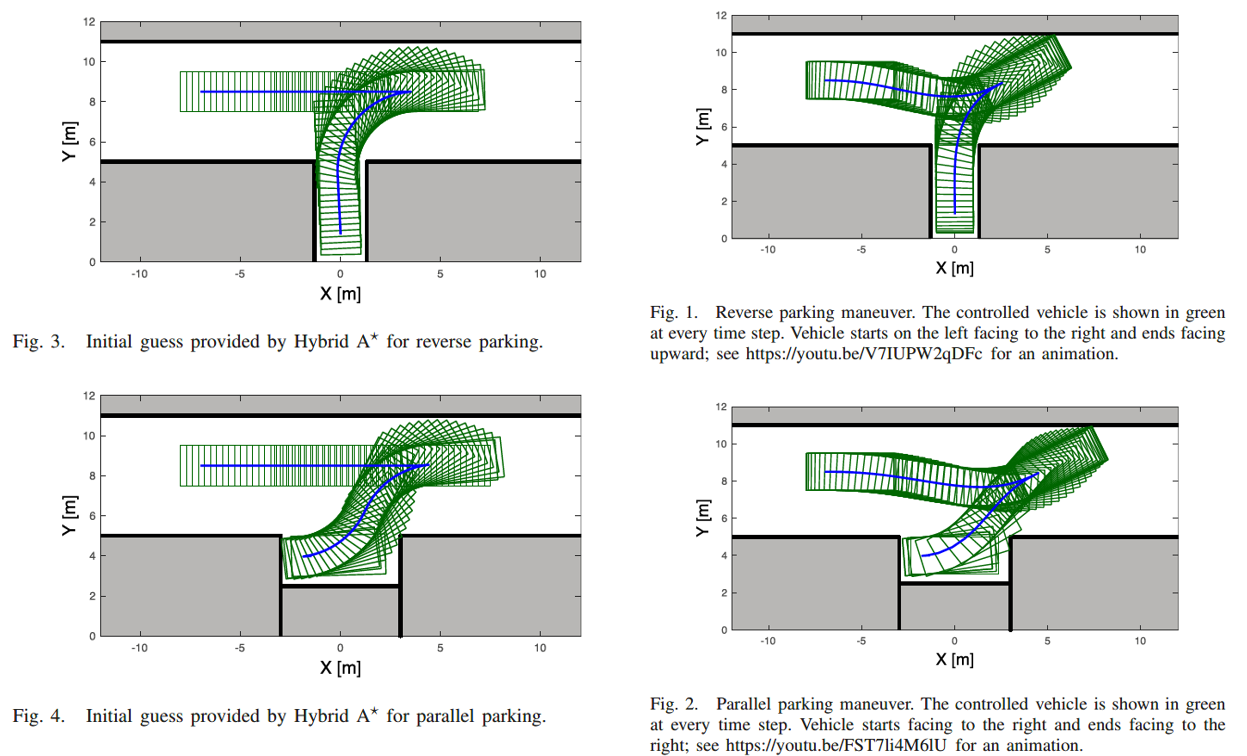
实际上在实验上也是如此,只是一开始说Hybrid A*太bangbang了,不像人开的一把倒车这种(虽然有时候人也不一定能一把倒好)。那就大致总结一下作者的看法:
- dynamic programming [17]
- reachability analysis [18]-[20]
- graph search method 比如A, Hybrid A [21]-[23]
- (random) sampling,比如急速随机探索的RRT和RRT* [24]-[27]
也就是以上几种都是作为基于优化的方法但是随同了一些其他方法,但是一般优化都需要一个warm start 肯定是需要随同其他给出一个呀 比如作者自己也是用了hybrid A*的warm start
从[29] 我们知道避障问题是一个已知的NP-hard问题,基本上所有的实用性方法都会有一些启发项的东西,而这些性能上的表现都是基于特定的问题和配置参数下,也就是泛化能力不强。
[30]-[34] 主要就是基于优化方法来考虑这一问题
II 问题描述
目标:找到一系列的控制指令使得机器人能从初始状态 \(x_s\) 运动到终点 \(x_F \in \mathbb R^{n_x}\)
- 同时优化我们的目标函数 \(J=\sum_{k=0}^{N} \ell\left(x_{k}, u_{k}\right)\) ,其中 \(\ell:\mathbb R^{n_x} \times \mathbb R^{n_u} \rightarrow \mathbb R\) 是一个stage cost
- 避免碰撞 \(M>1\) 个障碍物 \(\mathbb{O}^{(1)}, \mathbb{O}^{(2)}, \ldots, \mathbb{O}^{(M)} \subset \mathbb{R}^{n}\)
自身运动
状态间的转移:
\]
- \(x_k \in \mathbb R^{n_x}\) 是指机器人初始状态 \(x_0=x_S\)在时间 \(k\) 时的状态,大多数时候这里的 \(x_k\) 表示的是位置 \(p_k\in \mathbb R^{n}\) 与角度 \(\theta_k \in \mathbb R^n\),当然也有速度 \(\dot p_k\) 和 角速度 \(\dot \theta_k\)
- \(u_k \in \mathbb R^{n_u}\) 是指控制输入
- \(f:\mathbb R^{n_x}\times \mathbb R^{n_u} \rightarrow \mathbb R^{n_x}\) 描述了系统的动力学
此文中假设没有噪音和扰动,那么系统受限于输入和状态:
\]
自身空间内的表示:
- point-mass方式 自身就是一个小点 也就是位置点:
\]
- full dimensional set方式 自身也是一个多边形表示 所以是在一个初始集上进行旋转平移
\]
- 然后 \(\mathbb B\) 是一个多边形表示方式,"initial" convex set \(\mathbb B \subset \mathbb R^n\)
- 这个式子表示的是初始的一个多边形应该经过正阳的旋转和平移到自身的这样一个状态点 \(x_k\)
障碍物
多边形的表达方式,具体可以参照《凸优化》,其实多边形就是多条直线的交集,所以多边形就可以表达为如下,其中下面的 \(\mathcal K\) 是一种广义不等式的表达形式,可以简单理解为不等式就行。然后障碍物也是多边形,所以 \(\mathbb O\) 就认为是一个障碍物的表达式
\]
其中 \(\preceq\) 在原文notation进行了一定的解释,不过就和上面说的将其理解成多条直线的交集即可。
结合上面公式,相关车体自身和障碍物的限制也就能表示出来了:
\]
优化问题
结合公式(1)(2)(3),那么整体的优化问题就是这样的形式了:
\]
其中 \(\mathbb{E}\left(x_{k}\right) \cap \mathbb{O}^{(m)}=\emptyset\) 通常情况下是一个非凸和不可微的约束。所以接下来我们会介绍两种novel的方法去建模这个碰撞问题使得其连续和可微,以便可以使用现有的off-the-shelf gradient或者是基于hassian的优化算法来求解。
- 但是这里的限制 \(h(x_k,u_k)\le0\) 是我一直没搞清楚,即使到了文章的最后也没指出这个的形式,后续可能需要看一下代码中的表示
III Collision Avoidance
首先介绍一下他人的工作比如这篇
[10] Schulman, John, et al. "Motion planning with sequential convex optimization and convex collision checking." The International Journal of Robotics Research 33.9 (2014): 1251-1270.
提出了如何formulating这个碰撞检测问题,基于他们提出来的signed distance
\]
其中 \(\text {dist}(\cdot,\cdot)\) 和 \(\text {pen}(\cdot,\cdot)\) 公式如下:
\]
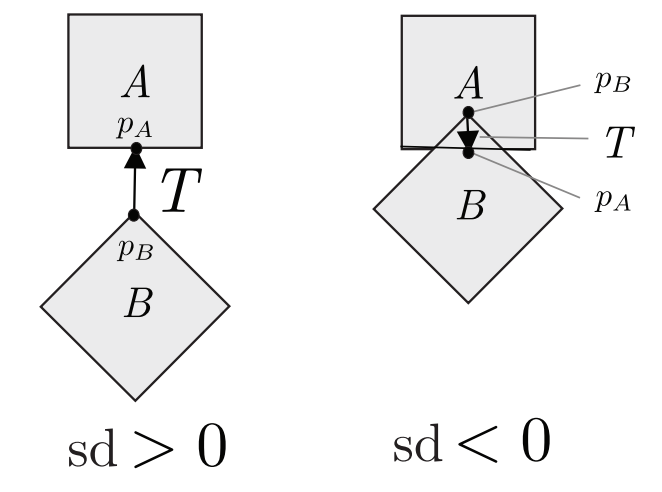
简单的来说就是sd>0的时候,他两不相交的最短距离值,sd<0时,则是他两相交的交集内的最短距离,可以大概结合一下上图看出来
所以这样子的情况下,我们的那个公式(3)的非凸和不可微的约束就可以换成 \(\text {sd}(\mathbb {E}(x), \mathbb O)>0\)。但是呢,问题还是存在的,还是非凸和不可微的;其次,为了让优化算法更有效求解,我们需要一个explicit的表达方式 但是 sd这种,本身就是dist 和pen这两个小的优化的最优解了。而这种情况下 我们会使用局部线性化近似(有空的话 再套娃看一下吧,这就是一开始介绍中说的 这样子方法的error是不好估计的。也就是说近似可以 但是你要知道近似的error这样好把控这个求解
本文提出的reformulation的方法就可以克服这个不可微问题 也不需要一个对于sd距离的explicit表达。虽然前文中提出的两种方法 其实是.. 一个用在point-mass,一个在full-dimensional 前者的更容易写,后者是用于实验,原理是一个原理
error的用处?
ybw:如果知道的话,可能可以用在膨胀 \(d_{min}\) ,比如如果这个error超过膨胀的限值 可能这个解我们就不相信
本文方法
根据前面表达的:
\]
\]
则我们的碰撞问题中dist表达,其中\(d_{min}\) 是自身设定的安全距离阈值
\]
公式(14) 已经直接把解法给出了,实际的证明过程如下:
这是根据前面我们表达的自身和障碍物而的出来的求解式子:
\[\begin{align*}\operatorname{dist}(\mathbb{E}(x), \mathbb{O})&=\min _{e, o}\left\{\|e-o\|: A o \preceq_{\mathcal{K}} b, e \in \mathbb{E}(x)\right\}\\&=\min _{e^{\prime}, o}\left\{\left\|R(x) e^{\prime}+t(x)-o\right\|: A o \preceq_{\mathcal{K}} b, G e^{\prime} \preceq_{\overline{\mathcal{K}}} g\right\}\end{align*}
\]对这个问题进行dual
\[\max _{\lambda, \mu}\left\{-g^{\top} \mu+(A t(x)-b)^{\top} \lambda: G^{\top} \mu+R(x)^{\top} A^{\top} \lambda=0,\left\|A^{\top} \lambda\right\|_{*} \leq 1, \lambda \succeq_{\mathcal{K}} 0, \mu \succeq_{\overline{\mathcal{K}}} \cdot 0\right\}
\]详情推导展开
首先需要打开凸优化英文原版418页 页码402页

dual全部完成后 还是一个nonconvex的优化问题,但是满足KKT条件就可以引入数值优化求解的方法,类似于一种迭代?但是因为是这样的 所以需要一个warm start 而这个warm start很大程度上决定了你是否能找到较好的解。
\[\begin{align*}&\displaystyle \min _{\mathbf x, \mathbf u,\boldsymbol \lambda, \boldsymbol \mu } \displaystyle \quad \sum _{k=0}^{N} \ell (x_{k}, u_{k}) \\&\,\,\, \text {s.t.} \quad \,\,~~x_{0} = x(0),\quad x_{N+1} = x_{F} \\&\qquad \quad \,\,\,\,\,~ x_{k+1} = f(x_{k},u_{k}),\quad h(x_{k}, u_{k}) \leq 0 \\&\qquad \quad \,\,\,\,\,-g^\top \mu _{k}^{(m)}+(A^{(m)}\,t(x_{k}) - b^{(m)})^\top \lambda _{k}^{(m)} > 0 \\&\qquad \quad \,\,~~ G^\top \mu _{k}^{(m)} + R(x_{k})^\top {A^{(m)}}^\top \lambda _{k}^{(m)} =0 \\&\qquad \quad \,\,~~ \big \|{A^{(m)}}^\top \lambda _{k}^{(m)}\big \|_{*} \leq 1, \quad \lambda _{k}^{(m)}\succeq _{ \mathcal {K}^{*}}0,~ \mu _{k}^{(m)}\succeq _{\bar{\mathcal {K}} ^{*}}0 \\&\qquad \quad \,\,\,~~ \text {for } k=0,\ldots,N,\quad m=1,\ldots,M\tag{15}\end{align*}
\]
后半段是加入了sd为负的情况,也就是如果一定要撞上的话 怎样撞 撞的比较轻:
\]
其中 \(s_{k}^{(m)} \in \mathbb R_+\)是一个在时间\(k\)下的slack variable associated with obstacle \(\mathbb O^{(m)}\),\(\kappa \ge0\) is a weight factor that keeps the slack variable as small as possible.
所以这么看下来主要不是说把非凸问题转成一个凸问题,而是非凸+不可微 → 非凸,然后使用Lagrange dual formulation去做成dual问题后 用数值优化方法进行求解。最后数值优化求解实验环节放在代码部分讲解,比较好直接对应,代码是julia版的
IV 代码阅读
车辆动力学
车的动力学 阿克曼模型的:
\]
下图为各个解释:
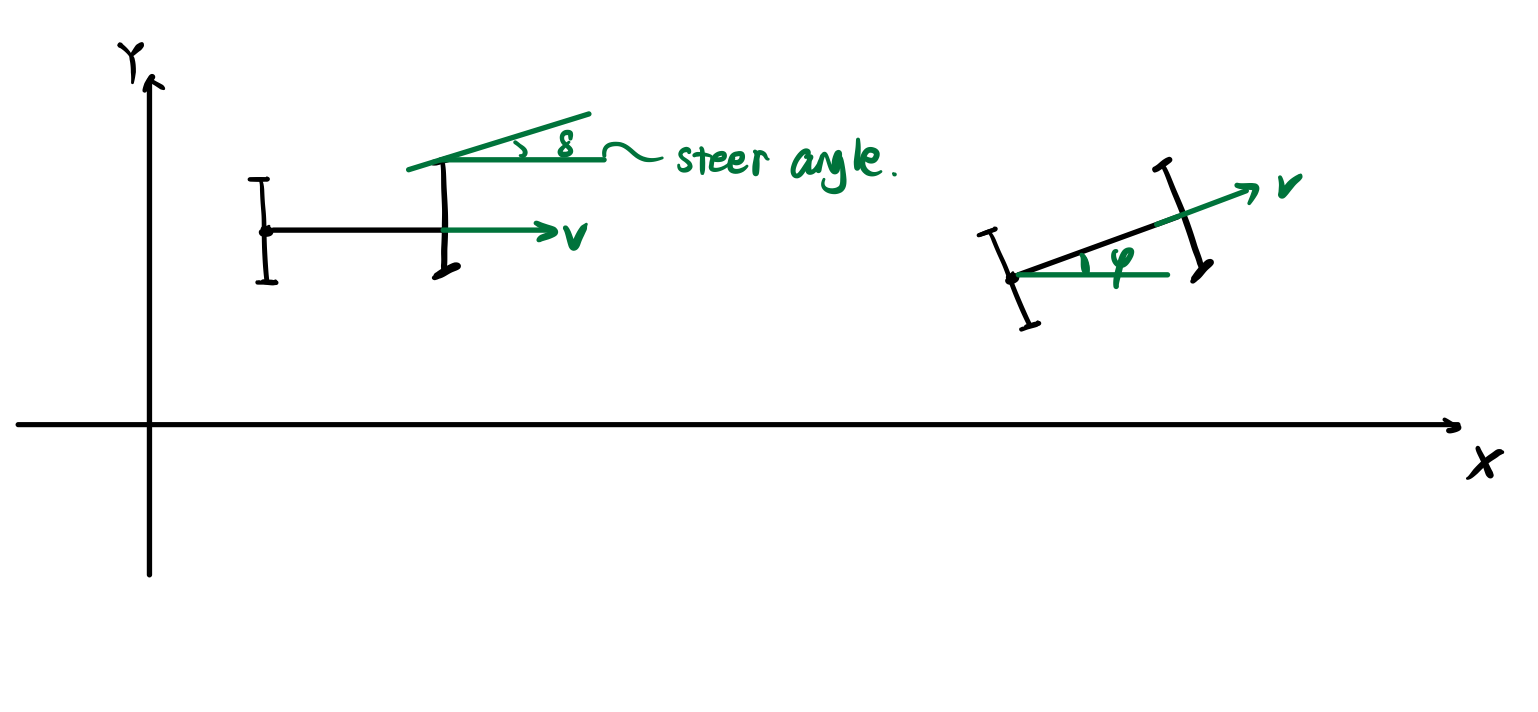
加上把这些范围对应到代码里
steering angle: \(\dot \delta \in [-0.6,0.6]\)
车辆速度:-1 到 2m/s
# [x_lower, x_upper, -y_lower, y_upper ]
XYbounds = [ -15, 15, 1, 10] # constraints are on (X,Y)
#input constraints
@constraint(m, [i=1:N], -0.6 <= u[1,i] <= 0.6)
@constraint(m, [i=1:N], -0.4 <= u[2,i] <= 0.4)
#state constraints
@constraint(m, [i=1:N+1], XYbounds[1] <= x[1,i] <= XYbounds[2])
@constraint(m, [i=1:N+1], XYbounds[3] <= x[2,i] <= XYbounds[4])
@constraint(m, [i=1:N+1], -1 <= x[4,i] <= 2)
##############################
# dynamics of the car
##############################
# - unicycle dynamic with euler forward
# - sampling time scaling, is identical over the horizon
for i in 1:N
if fixTime == 1
@NLconstraint(m, x[1,i+1] == x[1,i] + Ts*(x[4,i] + Ts/2*u[2,i])*cos((x[3,i] + Ts/2*x[4,i]*tan(u[1,i])/L)))
@NLconstraint(m, x[2,i+1] == x[2,i] + Ts*(x[4,i] + Ts/2*u[2,i])*sin((x[3,i] + Ts/2*x[4,i]*tan(u[1,i])/L)))
@NLconstraint(m, x[3,i+1] == x[3,i] + Ts*(x[4,i] + Ts/2*u[2,i])*tan(u[1,i])/L)
@NLconstraint(m, x[4,i+1] == x[4,i] + Ts*u[2,i])
else
@NLconstraint(m, x[1,i+1] == x[1,i] + timeScale[i]*Ts*(x[4,i] + timeScale[i]*Ts/2*u[2,i])*cos((x[3,i] + timeScale[i]*Ts/2*x[4,i]*tan(u[1,i])/L)))
@NLconstraint(m, x[2,i+1] == x[2,i] + timeScale[i]*Ts*(x[4,i] + timeScale[i]*Ts/2*u[2,i])*sin((x[3,i] + timeScale[i]*Ts/2*x[4,i]*tan(u[1,i])/L)))
@NLconstraint(m, x[3,i+1] == x[3,i] + timeScale[i]*Ts*(x[4,i] + timeScale[i]*Ts/2*u[2,i])*tan(u[1,i])/L)
@NLconstraint(m, x[4,i+1] == x[4,i] + timeScale[i]*Ts*u[2,i])
end
if fixTime == 0
@constraint(m, timeScale[i] == timeScale[i+1])
end
end
u0 = [0,0]
if fixTime == 1
for i in 1:N
if i==1
@constraint(m,-0.6<=(u0[1]-u[1,i])/Ts <= 0.6)
else
@constraint(m,-0.6<=(u[1,i-1]-u[1,i])/Ts <= 0.6)
end
end
else
for i in 1:N
if i==1
@NLconstraint(m,-0.6<=(u0[1]-u[1,i])/(timeScale[i]*Ts) <= 0.6)
else
@NLconstraint(m,-0.6<=(u[1,i-1]-u[1,i])/(timeScale[i]*Ts) <= 0.6)
end
end
end
cost function
最后cost function的形式是:
\]
##############################
# cost function
##############################
# (min control inputs)+
# (min time)+
# (regularization dual variables)
u0 = [0,0]
#fix time objective
if fixTime == 1
@NLobjective(m, Min,sum(0.01*u[1,i]^2 + 0.5*u[2,i]^2 for i = 1:N) +
sum(0.1*((u[1,i+1]-u[1,i])/Ts)^2 + 0.1*((u[2,i+1]-u[2,i])/Ts)^2 for i = 1:N-1)+
(0.1*((u[1,1]-u0[1])/(Ts))^2 + 0.1*((u[2,1]-u0[2])/(Ts))^2) +
sum(0.0001*x[4,i]^2 for i=1:N+1)+
sum(0.001*(x[1,i]-rx[i])^2 + 0.001*(x[2,i]-ry[i])^2 + 0.01*(x[3,i]-ryaw[i])^2 for i=1:N+1))
else
#varo time objective
@NLobjective(m, Min,sum(0.01*u[1,i]^2 + 0.5*u[2,i]^2 for i = 1:N) +
sum(0.1*((u[1,i+1]-u[1,i])/(timeScale[i]*Ts))^2 + 0.1*((u[2,i+1]-u[2,i])/(timeScale[i]*Ts))^2 for i = 1:N-1) +
(0.1*((u[1,1]-u0[1]) /(timeScale[1]*Ts))^2 + 0.1*((u[2,1]-u0[2]) /(timeScale[1]*Ts))^2) +
sum(0.5*timeScale[i] + 1*timeScale[i]^2 for i = 1:N+1)+
sum(0.0001*x[4,i]^2 for i=1:N+1)+
sum(0.001*(x[1,i]-rx[i])^2 + 0.001*(x[2,i]-ry[i])^2 + 0.0001*(x[3,i]-ryaw[i])^2 for i=1:N+1) )
#
end
这里是两个形式为了简单解释 我们以fixTime那个 虽然我也不知道fix的是啥,似乎是离散的时间步长还不一样。
每个sum都对应了公式(20)
\(\sum _{k=0}^{N-1} u_{k}^\top R u_{k}\) ,其中 \(R=\text{diag}(0.01,0.5)\)
sum(0.01*u[1,i]^2 + 0.5*u[2,i]^2 for i = 1:N)
\(\sum _{k=0}^{N-1}\Delta {u}_{k}^\top R_{\Delta } \Delta {u}_{k}\),其中 \(R_{\Delta }=\text{diag}(0.1,0.1)\)
sum(0.1*((u[1,i+1]-u[1,i])/Ts)^2 + 0.1*((u[2,i+1]-u[2,i])/Ts)^2 for i = 1:N-1)
+(0.1*((u[1,1]-u0[1])/(Ts))^2 + 0.1*((u[2,1]-u0[2])/(Ts))^2)
\(\sum _{k=0}^{N-1}\ell (x_{k}, u_{k})\) 应该是这个,然后对应的是公式 (19) 所有平方和相加,也就是\(\dot {X}, \dot {Y}, \dot {\varphi }, \dot {v}\)
\[\sum _{k=0}^{N-1}\ell (x_{k}, u_{k})=\sum _{k=0}^{N-1}(\Delta \dot X^2+\Delta \dot Y^2+\Delta \dot {\varphi }^2+ \dot {v}^2)
\]sum(0.0001*x[4,i]^2 for i=1:N+1) +
sum(0.001*(x[1,i]-rx[i])^2 + 0.001*(x[2,i]-ry[i])^2 + 0.01*(x[3,i]-ryaw[i])^2 for i=1:N+1)
- 但是第一项 也就是注释里写的 regularization dual variables 不太明白为什么是剩余的sum
碰撞约束
这一段的约束全都限制在公式 (15)/(18)中,注释中都详细标明了对应的约束公式简述:
##############################
# obstacle avoidance constraints
##############################
# width and length of ego set
W_ev = ego[2]+ego[4]
L_ev = ego[1]+ego[3]
g = [L_ev/2,W_ev/2,L_ev/2,W_ev/2]
# ofset from X-Y to the center of the ego set
offset = (ego[1]+ego[3])/2 - ego[3]
for i in 1:N+1 # iterate over time steps
for j = 1 : nOb # iterate over obstacles
Aj = A[sum(vOb[1:j-1])+1 : sum(vOb[1:j]) ,:] # extract obstacle matrix associated with j-th obstacle
lj = l[sum(vOb[1:j-1])+1 : sum(vOb[1:j]) ,:] # extract lambda dual variables associate j-th obstacle
nj = n[(j-1)*4+1:j*4 ,:] # extract mu dual variables associated with j-th obstacle
bj = b[sum(vOb[1:j-1])+1 : sum(vOb[1:j])] # extract obstacle matrix associated with j-th obstacle
# norm(A'*lambda) <= 1
@NLconstraint(m, (sum(Aj[k,1]*lj[k,i] for k = 1 : vOb[j]))^2 + (sum(Aj[k,2]*lj[k,i] for k = 1 : vOb[j]))^2 <= 1 )
# G'*mu + R'*A*lambda = 0
@NLconstraint(m, (nj[1,i] - nj[3,i]) + cos(x[3,i])*sum(Aj[k,1]*lj[k,i] for k = 1:vOb[j]) + sin(x[3,i])*sum(Aj[k,2]lj[k,i] for k = 1:vOb[j]) == 0 )
@NLconstraint(m, (nj[2,i] - nj[4,i]) - sin(x[3,i])*sum(Aj[k,1]*lj[k,i] for k = 1:vOb[j]) + cos(x[3,i])*sum(Aj[k,2]lj[k,i] for k = 1:vOb[j]) == 0 )
# -g'*mu + (A*t - b)*lambda > 0
@NLconstraint(m, (-sum(g[k]*nj[k,i] for k = 1:4) + (x[1,i]+cos(x[3,i])*offset)*sum(Aj[k,1]*lj[k,i] for k = 1:vOb[j])
+ (x[2,i]+sin(x[3,i])*offset)*sum(Aj[k,2]*lj[k,i] for k=1:vOb[j]) - sum(bj[k]*lj[k,i] for k=1:vOb[j])) >= dmin )
end
end
\]
然后就是使用IPOPT求解的过程了,其中有关于两个Lagrange factor的 warm start 求解过程一个initial
【论文阅读】Optimization-Based Collision Avoidance的更多相关文章
- 【论文阅读】Motion Planning through policy search
想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,[]以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔 ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- [论文阅读]阿里DIEN深度兴趣进化网络之总体解读
[论文阅读]阿里DIEN深度兴趣进化网络之总体解读 目录 [论文阅读]阿里DIEN深度兴趣进化网络之总体解读 0x00 摘要 0x01论文概要 1.1 文章信息 1.2 基本观点 1.2.1 DIN的 ...
- 分布式多任务学习论文阅读(四):去偏lasso实现高效通信
1.难点-如何实现高效的通信 我们考虑下列的多任务优化问题: \[ \underset{\textbf{W}}{\min} \sum_{t=1}^{T} [\frac{1}{m_t}\sum_{i=1 ...
- Learning under Concept Drift: A Review 概念漂移综述论文阅读
首先这是2018年一篇关于概念漂移综述的论文[1]. 最新的研究内容包括 (1)在非结构化和噪声数据集中怎么准确的检测概念漂移.how to accurately detect concept dri ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- 论文阅读笔记 - Mesos: A Platform for Fine-Grained ResourceSharing in the Data Center
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
随机推荐
- Java面试题:Spring Bean线程安全?别担心,只要你不写并发代码就好了!
Spring中的Bean是否线程安全取决于Bean的作用域(scope).Spring提供了几种不同的Scope,其中包括Singleton.Prototype.Request.Session.Glo ...
- JDK源码阅读-------自学笔记(十六)(java.util.Random随机数类)
Random类简介 如果使用Math.random()计算过于复杂的话,我们可以使用例外一种方式得到随机数,即Random类,这个类是专门用来生成随机数的,并且Math.random()底层调用的就是 ...
- 鸿蒙HarmonyOS实战-Stage模型(ExtensionAbility组件)
一.ExtensionAbility组件 1.概念 HarmonyOS中的ExtensionAbility组件是一种能够扩展系统功能的能力组件.它可以通过扩展系统能力接口,为应用程序提供一些特定的功能 ...
- AIRIOT物联网低代码平台如何配置Modbus TCP协议?
AIRIOT物联网低代码平台稳定性超高,支持上百种驱动,各种主流驱动已在大型项目中通过验证,持续稳定运行. AIRIOT物联网低代码平台如何配置Modbus TCP协议?操作如下: AIRIOT与西门 ...
- [数字华容道] Html+css+js 实现小游戏
[数字华容道] Html+css+js 实现小游戏 效果图 代码预览 在线预览地址 代码示例 <!DOCTYPE html> <html> <head> <m ...
- 工作面试老大难-MySQL中的锁类型
MySQL 是支持ACID特性的数据库.我们都知道"C"代表Consistent,当不同事务操作同一行记录时,为了保证一致性,需要对记录加锁.在MySQL 中,不同的引擎下的锁行为 ...
- HTML——标签元素的两大类
块级标签(block) – 独占一行 内联标签(inline) – 按文本内容占位 div标签和span标签 <div>只是一个块级元素,并无实际的意义.主要通过CSS样式为其赋予不同的表 ...
- H.265码流解析
这一篇内容旨在对H.265码流中的一些概念做简单了解,部分概念与H.264相同,本篇中将不再重复. 1.NALU H.265(HEVC)码流的NALU结构和AVC有一些不同,属于增强版,HEVC NA ...
- ReplayKit2 有线投屏项目-反向Socket实现
一.需求 我们在使用RTMP协议进行推流的时候,底层仍然采用的是TCP协议或者QUICK协议,有客户端主动发起请求.但是在有线投屏中,需要PC端向手机发起请求建立连接 二.实现 在客户端主动发起请求之 ...
- MySQL学习笔记-多表查询(下)
多表查询(下) 一. 联合查询 联合查询:将多次查询结果合并,形成新的查询结果集 select {字段列表} from {表A} ... union [all] select {字段列表} from ...