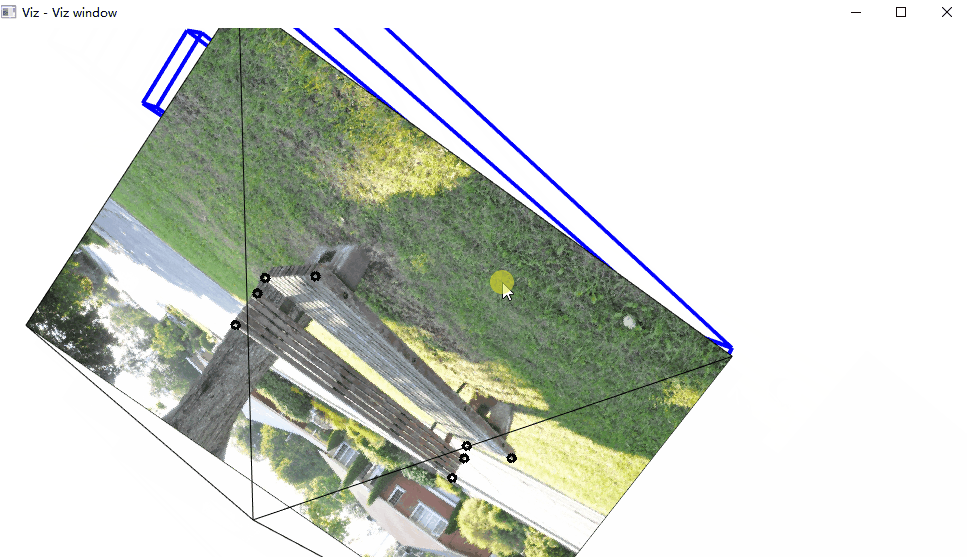
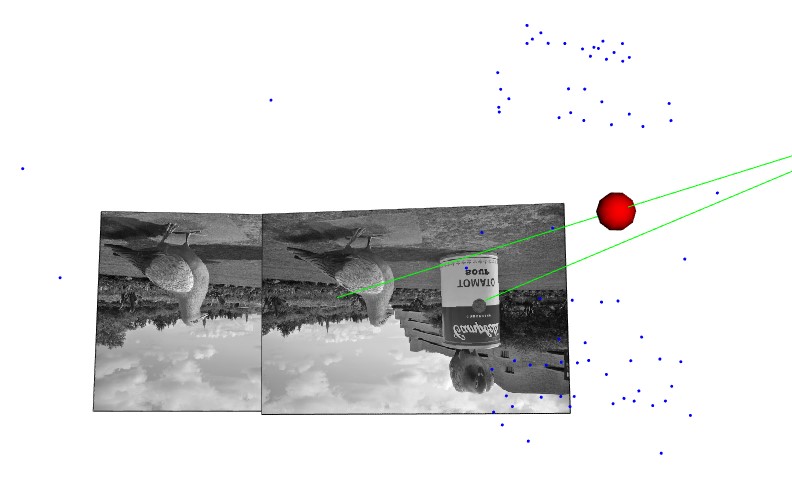
基于OpenCV做“三维重建”(4)--相机姿态还原和实现三维重建
v当我们构建成功了viz,就可以使用3维效果给我们提供的便利,进一步进行一些3维的操作。

附件列表
基于OpenCV做“三维重建”(4)--相机姿态还原和实现三维重建的更多相关文章
- 基于OpenCV做“三维重建”(1)--找到并绘制棋盘
<OpenCV计算机视觉编程攻略(第3版)>这套书已经出到第3版了,如果你非要我说这本书有多好,我说不出来:只是很多我第一手的例子都是来源于这本书的-相比较OpenCV官方提供的代码,这本 ...
- 基于OpenCV做“三维重建”(3)--相机参数矩阵
通过前面的相机标定,我们能够获得一些参数模型.但是这些相机的参数矩阵到底是什么意思?怎样才能够判断是否正确?误差都会来自哪里?这里就必须要通过具体实验来加深认识.采集带相机参数的图片具有一定难度,幸好 ...
- 基于OpenCV做“三维重建”(0)-- OpenCV3.2+VIZ6.3.0在vs2012下的编译和使用
一.问题提出 ViZ对于显示3维的效果图来说,非常有帮助:我在使用OpenCV进行双目测距的过程中,有一些参数希望能够通过可视化的方法显示出来,所以参考了这方面相关的资料.做了一些实验 ...
- 基于OpenCV做“三维重建”(2)--封装标定过程
既然已经能够找到了标定点,那么下边的工作就是使用标定结果了.[这本书在这里的内容组织让人莫名其妙]但是通过阅读代码能够很方便地串起来. /*------------------------------ ...
- OpenCV Using Python——基于SURF特征提取和金字塔LK光流法的单目视觉三维重建 (光流、场景流)
https://blog.csdn.net/shadow_guo/article/details/44312691 基于SURF特征提取和金字塔LK光流法的单目视觉三维重建 1. 单目视觉三维重建问题 ...
- 基于 OpenCV 的人脸识别
基于 OpenCV 的人脸识别 一点背景知识 OpenCV 是一个开源的计算机视觉和机器学习库.它包含成千上万优化过的算法,为各种计算机视觉应用提供了一个通用工具包.根据这个项目的关于页面,OpenC ...
- 基于OpenCV的双目视觉匹配测距系统
刚读研究生的时候,自己导师研究的方向是双目视觉,于是让自己研究OpenCV,折腾了几个月,算法上没啥突破,不过工程上还是折腾出了一个能用的小玩意,基于OpenCV实现了相机的标定.双目视觉图片的矫正. ...
- [转载]卡尔曼滤波器及其基于opencv的实现
卡尔曼滤波器及其基于opencv的实现 源地址:http://hi.baidu.com/superkiki1989/item/029f65013a128cd91ff0461b 这个是维基百科中的链接, ...
- 每日一练之自适应中值滤波器(基于OpenCV实现)
本文主要介绍了自适应的中值滤波器,并基于OpenCV实现了该滤波器,并且将自适应的中值滤波器和常规的中值滤波器对不同概率的椒盐噪声的过滤效果进行了对比.最后,对中值滤波器的优缺点了进行了总结. 空间滤 ...
随机推荐
- 解决 AutoMapper ProjectTo 不起作用的问题
这两天在一个 ASP.NET Core 项目中遭遇了 AutoMapper ProjectTo 不起作用的奇怪问题,虽然在 ProjectTo 中指定了 DTO ,但 EF Core 生成的 SQL ...
- 2. Scala变量
2.1 变量是程序的基本组成单位 举一个简单的例子 object boke_demo01 { def main(args: Array[String]): Unit = { var a: Int = ...
- linux查看所有用户信息
所有的用户信息在根目录/etc/中passwd文件内,而passwd的所有权限是root用户及root组用户,所有想要查看所有用户,需要root用户登录系统. root用户登录后,可以直接用查看命令c ...
- Java注解--笔记
@Override标签的作用@Override是伪代码,所以是可写可不写的.它表示方法重写,写上会给我们带来好处. 1.可以当注释用,方便阅读. 2.告诉阅读你代码的人,这是方法的复写. 3.编译器可 ...
- mysql本地安装
1.下载地址: https://downloads.mysql.com/archives/community/ 2.安装: 解压目录:D:\mysql\mysql-5.6.36-winx64 2.1. ...
- java手写线程池,完善中
package com.test001.threadpool; import java.util.LinkedList; import java.util.List; import java.util ...
- VisualStudioCode中用dotnet命令创建多个ASP.NET Core 项目、类库、控制台程序,并添加应用间的引用
一.准备工作 首先安装VisualStudioCode并且可以使用. 1.首先新创建空的MyApps文件夹,作为项目主目录,下面将在这个文件夹中创建多个web应用程序.类型.控制台程序等. 2.打开V ...
- Vue keep-alive如何实现只缓存部分页面
prop: include: 字符串或正则表达式.只有匹配的组件会被缓存. exclude: 字符串或正则表达式.任何匹配的组件都不会被缓存. 在2.1.0版本Vue中 常见用法: // 组件 exp ...
- Oracle数据泵远程导入数据
查看现存镜像目录 select * from dba_directories; 创建镜像目录 create or replace directory my_dir as 'local_dir' ; 把 ...
- JAVA学习笔记 (okHttp3的用法)
最近的项目中有个接口是返回文件流数据,根据我们这边一个验签的插件,我发现里面有okHttpClient提供了Call.Factory,所以就学习了下okHttp3的用法. 1.概述 okhttp是一个 ...