倍福TwinCAT(贝福Beckhoff)应用教程13.3 TwinCAT控制松下伺服 NC配合完整上位
这是TwinCAT教程的最后一节,简单讲述了以C#为上位,通过ADS控制TwinCAT下位,实现完整控制两轴模组的功能。可以发现,在上位层已经没有了运动控制的代码,不管是要执行哪种运动,无非是把目标参数写入到绑定的对应变量,然后修改下位的任务号CurrentJob

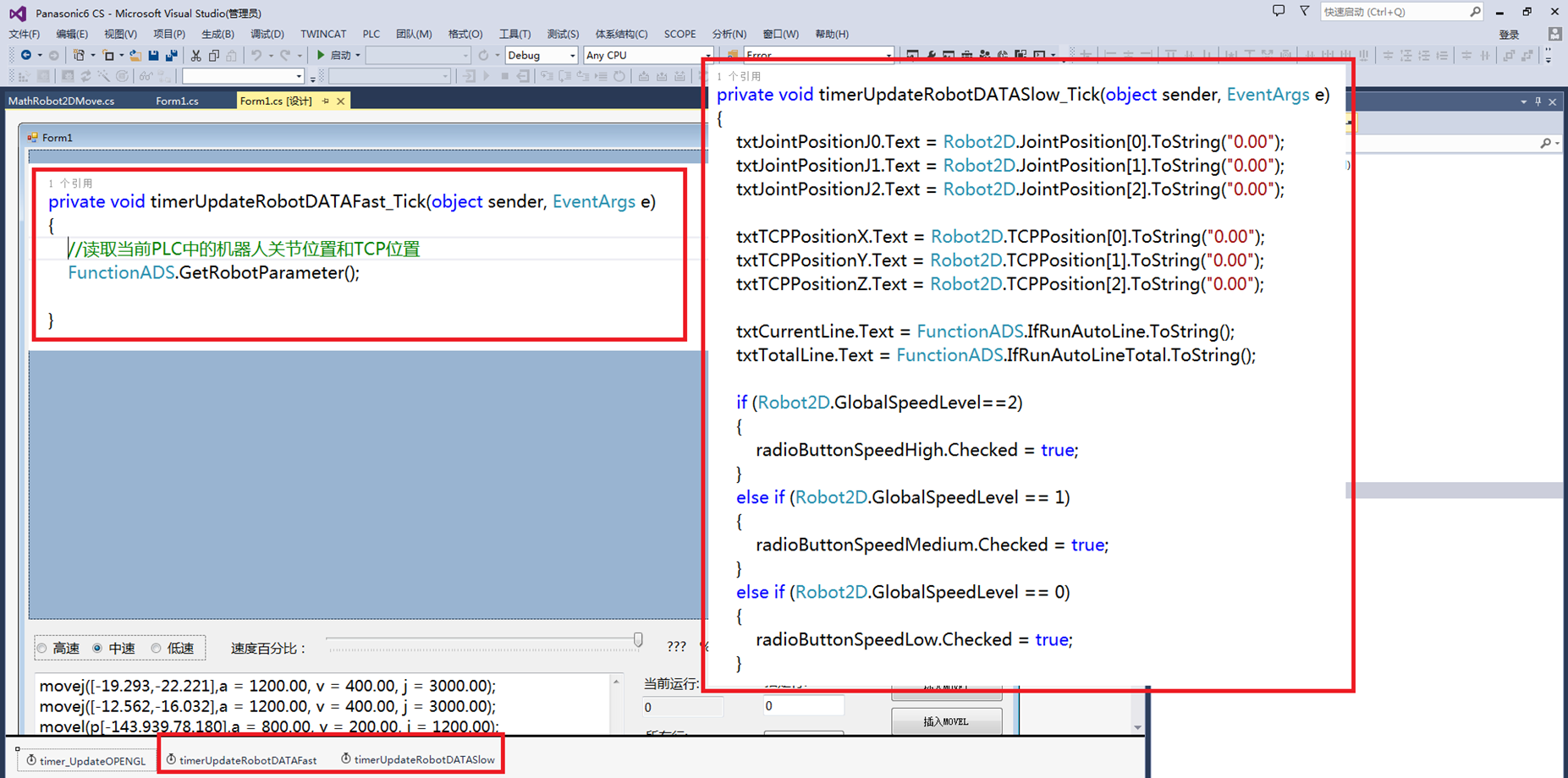
在C#中一方面需要定时采集机器人的位置,速度还有状态等信息,另一方面需要显示这些信息(或者说利用这些信息)。采集需要足够快(比如判断一条命令是否执行完毕,应该是越快越好,可以立即执行下一条命令),而显示则可以慢一点(可想如果需要大幅更新主界面数据,如果也5ms,10ms更新一次会消耗大量资源,同时也没有什么实用价值)
为了实现单条命令的生成,我们需要得到一种格式,比如下面的两句,要求命令的执行函数名(MOVEJ/MOVEL),目标位置(关节位置数组/TCP位置数组),目标速度,加速度,加加速度。每一家标准工业机器人的语法不太一样,但是都是大同小异。其实可以完善的地方很多,比如用户movej的时候给目标TCP位置而不是关节位置如何处理,比如多加了逗号,引号如何判断等等
movej([-12.562,-16.032],a = 1200.00, v = 400.00, j = 3000.00);
movel(p[-143.939,78.180],a = 800.00, v = 200.00, j = 1200.00);

为了实现单条语句的执行,本质上就是生成语句的反过程(这也是单步执行和跳转到指定行执行的原理),解析成功或者失败都要有反馈(通过委托往外传递),一来可以提示用户要执行的语句语法错误,二来在连续执行的时候如果发现了重复指令需要自动跳过执行下一行。

这就牵扯到了连续运行的原理,我们首先把textbox的所有文本按行分割,一行就认为是一句。给定一个起始下标默认从第0行开始执行(字符串命令拆分到数组的第一个元素),连续运行的时候先手动执行第一行。如果完成则C#会通过信号的上升沿捕捉到,然后通过委托告知主界面,主界面把下标加1,接着执行下一句,如果超过了总的行数则下标复位(当然如果是空行或者重复行,或者语法错误行,都应该跳过或者用其他处理办法,比如加红加粗表示这行有问题)

以上简述的只是简单的连续执行原理,所有语法需要自己定义,而且无法掺杂更加高级的语法和判断(比如既然是一行作为一句,就无法嵌套if,switch语句这些判断情况。而且由于所有语句需要自己解析,对于数组,指针,结构体,对象,委托等等变量都很难处理)。简单点说这更像是一个G代码的处理模式,一行就是一行,实用价值也是有的,但无法真正作为编译器使用。
编译器和高级语言的嵌入也是比较复杂的。例如C++或者Linux可以考虑LUA,可以发现官方的演示中测试自定义方法,也可以定义变量,for循环,if语句等等(具体如何嵌入到高级语言还需要读者自己研究)
https://www.lua.org/cgi-bin/demo

如果是.NET平台可以使用微软自带的Roslyn编译器,已经是开源的,而且网上有很多可以参考的范例
http://www.cnblogs.com/TianFang/archive/2012/02/14/2351817.html

此外还有一些Web平台,可以使用类似于JavaScript的语言作为编译器(甚至不需要IDE可以在线编程)
官方网站:www.compilr.com

官方网站:www.jsfiddle.net

官方网站:www.botskool.com/online-compiler

更多教学视频和资料下载,欢迎关注以下信息:
我的优酷空间:
http://i.youku.com/acetaohai123

我的在线论坛:
http://csrobot.gz01.bdysite.com/

问题交流:
QQ:910358960
倍福TwinCAT(贝福Beckhoff)应用教程13.3 TwinCAT控制松下伺服 NC配合完整上位的更多相关文章
- 倍福TwinCAT(贝福Beckhoff)应用教程12.3 TwinCAT控制松下伺服 NC进阶
在前面一节,我们简单介绍了通过PLC+HMI实现完整控制松下伺服的上使能-运动,采集位置,速度等功能,这里我们会大量简化用到的贝福功能块(为了更加实用).首先依然是对单个轴的封装,我们之前的做法,例如 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.1 TwinCAT控制松下伺服 NC高级
本节主要演示了使用自定义函数实现电机的运动(梯形曲线和S曲线都有实现),这里的JOG+和JOG-,针对单个关节实现了PTP的运动(跟贝福的MoveAbsolute功能块实现效果一致),在此没有介绍运动 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.2 TwinCAT控制松下伺服 NC初步
在前面我们已经学会了使用贝福自带的调试软件完成试运行,接下来是使用TWINCAT PLC实现这个功能,右击PLC添加一个PLC项目 在VISUs上右击添加一个HMI人机界面 目前PLC程序和人 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.2 TwinCAT控制松下伺服 CS说明
虚拟仿真上,要注意仿真只是为了可视化,可以看到数据的变动是否和实际一致,所以Robot2D才是主要因素,虚拟仿真采集机器人的关节位置或者TCP位置来显示而已,为了测试一些别的算法,我们还可以在虚拟仿真 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.2 TwinCAT控制松下伺服 NC自定义直线插补
对于MOVEJ的关节运动来说,我们只关心每个电机的角度(只需要考虑多个电机协同开始运动和结束运动,关键是对每个电机加速度均一化,从而一起跑一起停,这部分内容可以参考机器人学导论以获取更加详细的说明), ...
- 倍福TwinCAT(贝福Beckhoff)基础教程1.2 TwinCAT安装配置
由于TC2和TC3都有可能用到,个人推荐都安装,但是注意必须是先安装的TwinCAT2,然后安装TwinCAT3,如果反了可能两个都没法用(打开TcSwitchRuntime提示Both TwinCA ...
- 倍福TwinCAT(贝福Beckhoff)基础教程1.1 TwinCAT背景知识
本节附件中有很多PPT介绍贝福TwinCAT和EtherCAT的相关技术,在此只做简单说明. 简单总结:EtherCAT就是一种总线技术,具有速度快,稳定性高,布线简单等优点,详细可以参考下面这个PP ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.1 TwinCAT控制松下伺服 连接和试运行
首先是用松下伺服自带的软件可以测试运行(驱动器,电机都连接好,然后用USB线连接到松下伺服驱动器的X1口),打开调试软件会自动提示连接到伺服 一般需要对驱动器清除绝对值编码器数据(驱动器可能报错4 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程11.1 TwinCAT应用小程序1 如何读写数字量模拟量输入输出(DI,DO,AI,AO)
常见的模拟量模块(还有更高端和更低端的,使用方法都一样) EL3054和EL4024(4路模拟量输入和输出模块) 常见的数字量模块(还有更高端和更低端的,使用方法都一样) EL1809和EL280 ...
随机推荐
- hihocoder-第六十一周 Combination Lock
题目1 : Combination Lock 时间限制:10000ms 单点时限:1000ms 内存限制:256MB 描述 Finally, you come to the interview roo ...
- SPOJ - AMR11H
Array Diversity Time Limit: 404MS Memory Limit: 1572864KB 64bit IO Format: %lld & %llu Submi ...
- java设计模式之实现对象池模式示例分享
http://www.jb51.net/article/46941.htm 对象池模式经常用在频繁创建.销毁对象,且对象创建.销毁开销很大的场景,比如数据库连接池.线程池.任务队列池等.本代码简单,没 ...
- rest_frameword框架的基本组件
序列化 序列化:转化数据和校验数据(提交数据时校验数据类型) 开发我们的Web API的第一件事是为我们的Web API提供一种将代码片段实例序列化和反序列化为诸如json之类的表示形式的方式.我们可 ...
- catkin详细解释
http://answers.ros.org/question/58498/what-is-the-purpose-of-catkin_depends/
- MATLAB作图方法与技巧(三)
1.利用指令plot绘制圆的参数方程x = sin(t),y = cos(t),(0<=t<=2*pi)的曲线图. 代码如下 t = linspace(0,2*pi,100); x = s ...
- Mysql的碎片查看与处理
-- 每张表的大小 参考网址:http://www.oschina.net/question/12_3673 -- DATA_FREE 大于零表示有碎片 -- 在我们的项目中,生产环境一律采用独立的表 ...
- UESTC 30.最短路-最短路(Floyd or Spfa(链式前向星存图))
最短路 Time Limit: 3000/1000MS (Java/Others) Memory Limit: 65535/65535KB (Java/Others) 在每年的校赛里,所有进入决赛的同 ...
- (2)C# 创建ef oracle
1.NUGet下载 2.下载 Oracle Developer Tools for Visual Studio https://www.oracle.com/technetwork/develope ...
- 树状数组【CF703D】Mishka and Interesting sum
Description 给你n( 1<=n<=1000000)个数,以及m(1<=m<=1000000)个询问,每个询问包括l和r,问你在这n个数中,区间l~r,出现偶数个数的 ...