【探索之路】机器人篇(4)-根据3D文件来优化自己的机器人模型
此章节不是必须做的!!!!
因为我已经用solidworks画了机器人的3D模型,那我就直接导入已经画好的三维模型。
如果大家没有画也是可以直接使用上一章节我们已经构建的机器人模型。我这里只是一个对显示的优化,不会影响后续功能的测试。
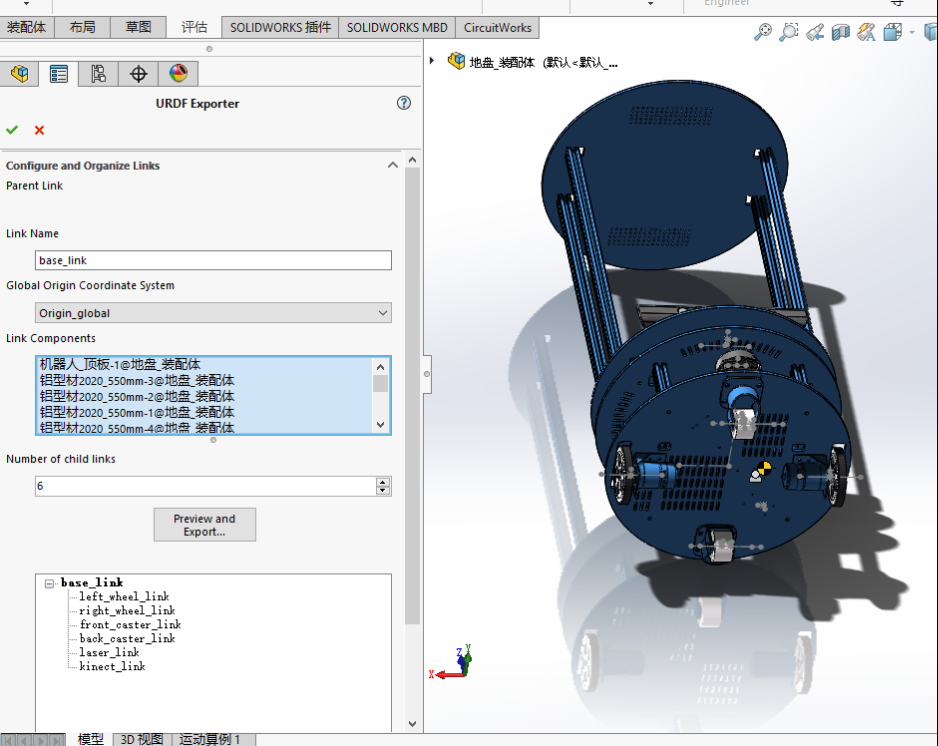
我们之前已经画好了三维模型,那么我们如何将solidworks中的模型导入到urdf中呢?我在百度上查到了solidworks有一个插件(sw2urdfSetup.exe),可以直接将三维模型生成ros的package。这个插件是ros提供的,但是在生成的package中有些配置是提供的模板,直接编译会报错,需要略微修改一下,具体修改教程我们可以搜索一下。
博文:【ROS学习】Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学
这里我提醒一下,我使用的是solidworks 2017版。在上面的博文中,插件的file是在菜单栏中,而在我的软件中却在工具的标签下,这里需要注意一下。
而且在我实际的测试中,发现转轴可以不手动设置,它能自己识别并添加,但最好加上联动的方式,这样才能更好的识别。自动生成的坐标系的基准点有点儿乱,可以在软件自动生成之后手动修改一下。
在生成的ros的package中,发现urdf加载的stl模型文件,但是注意,这里的stl文件是通过sw2urdfSetup.exe插件生成的,如果直接将三维图像保存为STL格式的话是无法正常显示的。
我们可以看一下在solidworks中的界面。我刚刚重新对万向轮的3D图纸做了一下优化。

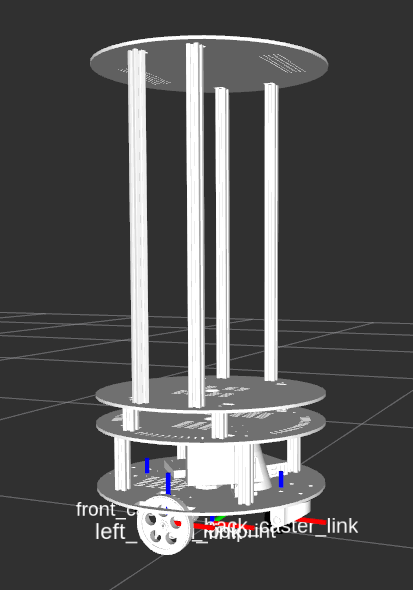
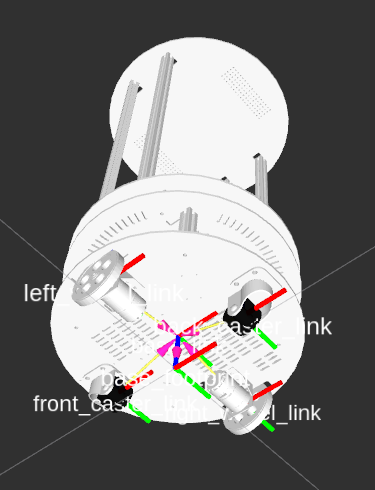
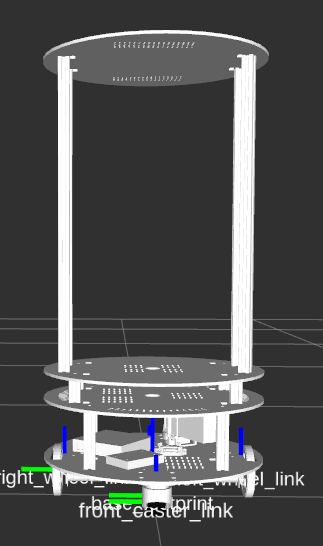
我们也可以在rviz中看一下效果。
目前,此版本的机械图纸和代码已经上传保存,编号是V4.
【探索之路】机器人篇(4)-根据3D文件来优化自己的机器人模型的更多相关文章
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 【探索之路】机器人篇(1)-ROS-mwRobot开篇
机器人的定义 首先,什么才是机器人?机器人是不是必须和人一样的外形?我们先看一看维基百科给机器人的定义: 由上可见,机器人并不是和人一样的外形,而是可以模拟人类行为或者思想再或者是模拟其他生物的机械. ...
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernetes)-kubernetes/dashboard
本章介绍所需环境:ubuntu18.04,建立在上一篇微服务探索之路01篇已经安装了docker的基础上. 1 替换k8s镜像源为国内镜像 进入目录 cd /etc/apt/sources.list. ...
- 微服务探索之路03篇-docker私有仓库Harbor搭建+Kubernetes(k8s)部署私有仓库的镜像
❝ 目录: 微服务探索之路01篇.net6.0项目本地win10系统docker到服务器liunx系统docker的贯通 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernet ...
- 解剖SQLSERVER 第十六篇 OrcaMDF RawDatabase --MDF文件的瑞士军刀(译)
解剖SQLSERVER 第十六篇 OrcaMDF RawDatabase --MDF文件的瑞士军刀(译) http://improve.dk/orcamdf-rawdatabase-a-swiss-a ...
- Unity 3D 文件导入出错
Unity 3D 文件导入出错 安装unity 时我选择了free版的,打开已有项目时出现例如以下错误提示 解决的方法: 先把要导入的文件先复制到unity3d安装文件夹下相应的文件夹内,之后再返回u ...
- Linux入门篇(三)——文件与目录
这一系列的Linux入门都是本人在<鸟哥的Linux私房菜>的基础上总结的基本内容,主要是记录下自己的学习过程,也方便大家简要的了解 Linux Distribution是Ubuntu而不 ...
- (代码篇)从基础文件IO说起虚拟内存,内存文件映射,零拷贝
上一篇讲解了基础文件IO的理论发展,这里结合java看看各项理论的具体实现. 传统IO-intsmaze 传统文件IO操作的基础代码如下: FileInputStream in = new FileI ...
随机推荐
- 网骗欺诈?网络裸奔?都是因为 HTTP?
先跟大家讲个故事,我初恋是在初中时谈的,我的后桌的后桌.那个时候没有手机这类的沟通工具,上课交流有三宝,脚踢屁股.笔戳后背以及传纸条,当然我只能是那个屁股和后背,还不是能让初恋踢到的后背. 但是说实话 ...
- MySQL——一致性非锁定读(快照读)&MVCC
MySQL--一致性非锁定读(快照读) MySQL数据库中读分为一致性非锁定读.一致性锁定读 一致性非锁定读(快照读),普通的SELECT,通过多版本并发控制(MVCC)实现. 一致性锁定读(当前读) ...
- go结构体与方法
go结构体相当于python中类的概念 结构体用来定义复杂的数据结构,存储很多相同的字段属性 1.结构体的定义以及简单实用 package main import ( "fmt" ...
- C++编程指南续
三. 命名规则 比较著名的命名规则当推Microsoft公司的"匈牙利"法,该命名规则的主要思想是"在变量和函数名中加入前缀以增进人们对程序的理解".例如所有的 ...
- linux搭建harbor与使用
条件:安装docker&docker-compose 如未安装,请看:linux离线安装docker + docker-compose harbor 1.下载 下载地址:https://git ...
- 第15.44节、PyQt输入部件:QAbstractSlider派生类QScrollBar滚动条、QSlider滑动条、QDial刻度盘功能详解
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.引言 Designer中的输入部件Horizo ...
- 转:【Python3网络爬虫开发实战】6.4-分析Ajax爬取今日头条街拍美图
[摘要] 本节中,我们以今日头条为例来尝试通过分析Ajax请求来抓取网页数据的方法.这次要抓取的目标是今日头条的街拍美图,抓取完成之后,将每组图片分文件夹下载到本地并保存下来. 1. 准备工作 在本节 ...
- PyQt Designer中带参数的信号为什么匹配不到带参数的槽函数?
老猿在学习ListView组件时,想实现一个在ListView组件中选中一个选择项后触发消息给主窗口,通过主窗口显示当前选中的项的内容. 进入QtDesigner后,设计一个图形界面,其中窗口界面使用 ...
- 精品软件-OfficeBox办公神器
办公文档office处理套件,非常齐全,小巧! 官方地址:http://www.wofficebox.com/
- Java集合源码分析(九)——HashSet
简介 HashSet就是一个集合,里面不能有重复的元素,元素也是无序的. HashSet其实就是调用了HashMap实现的,所以,它也不是线程安全的. HashSet通过iterator()返回的迭代 ...