最小生成树的两种方法(Kruskal算法和Prim算法)
关于图的几个概念定义:
- 连通图:在无向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该无向图为连通图。
- 强连通图:在有向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该有向图为强连通图。
- 连通网:在连通图中,若图的边具有一定的意义,每一条边都对应着一个数,称为权;权代表着连接连个顶点的代价,称这种连通图叫做连通网。
- 生成树:一个连通图的生成树是指一个连通子图,它含有图中全部n个顶点,但只有足以构成一棵树的n-1条边。一颗有n个顶点的生成树有且仅有n-1条边,如果生成树中再添加一条边,则必定成环。
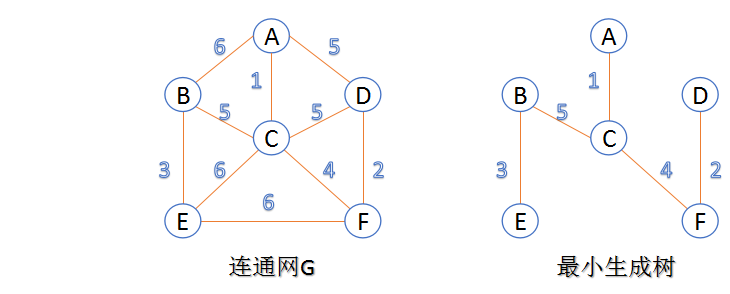
- 最小生成树:在连通网的所有生成树中,所有边的代价和最小的生成树,称为最小生成树。
下面介绍两种求最小生成树算法
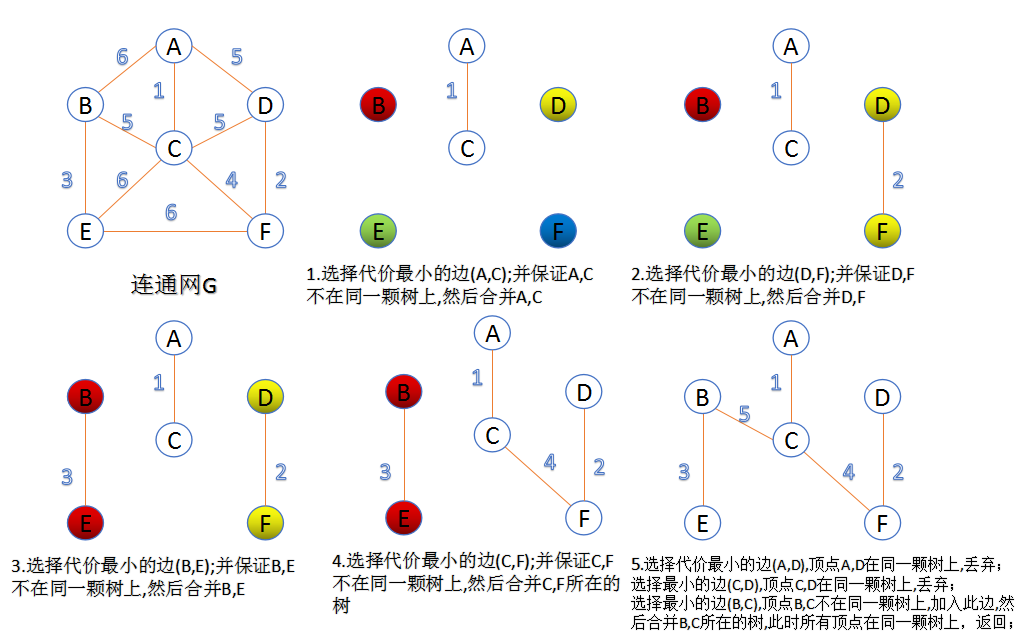
1.Kruskal算法
此算法可以称为“加边法”,初始最小生成树边数为0,每迭代一次就选择一条满足条件的最小代价边,加入到最小生成树的边集合里。
- 把图中的所有边按代价从小到大排序;
- 把图中的n个顶点看成独立的n棵树组成的森林;
- 按权值从小到大选择边,所选的边连接的两个顶点ui,viui,vi,应属于两颗不同的树,则成为最小生成树的一条边,并将这两颗树合并作为一颗树。
- 重复(3),直到所有顶点都在一颗树内或者有n-1条边为止。
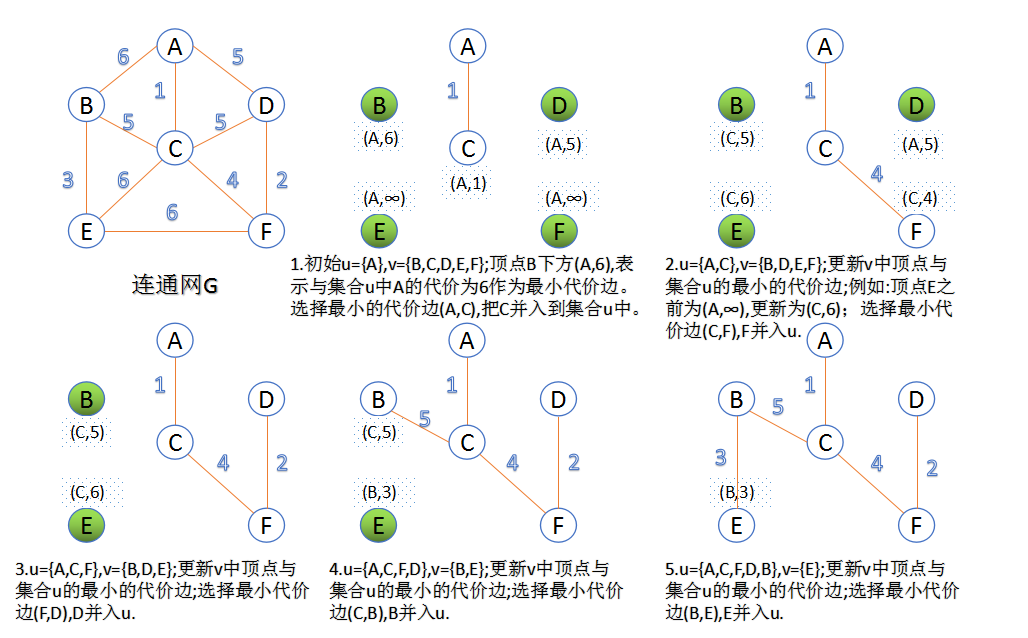
2. Prim算法
此算法可以称为“加点法”,每次迭代选择代价最小的边对应的点,加入到最小生成树中。算法从某一个顶点s开始,逐渐长大覆盖整个连通网的所有顶点。
- 图的所有顶点集合为VV;初始令集合u={s},v=V−uu={s},v=V−u;
- 在两个集合u,vu,v能够组成的边中,选择一条代价最小的边(u0,v0)(u0,v0),加入到最小生成树中,并把v0v0并入到集合u中。
- 重复上述步骤,直到最小生成树有n-1条边或者n个顶点为止。
由于不断向集合u中加点,所以最小代价边必须同步更新;需要建立一个辅助数组closedge,用来维护集合v中每个顶点与集合u中最小代价边信息,:
struct
{
char vertexData //表示u中顶点信息
UINT lowestcost //最小代价
}closedge[vexCounts]
3. 完整代码
/************************************************************************
CSDN 勿在浮沙筑高台 http://blog.csdn.net/luoshixian099算法导论--最小生成树(Prim、Kruskal)2016年7月14日
************************************************************************/
#include <iostream>
#include <vector>
#include <queue>
#include <algorithm>
using namespace std;
#define INFINITE 0xFFFFFFFF
#define VertexData unsigned int //顶点数据
#define UINT unsigned int
#define vexCounts 6 //顶点数量
char vextex[] = { 'A', 'B', 'C', 'D', 'E', 'F' };
struct node
{
VertexData data;
unsigned int lowestcost;
}closedge[vexCounts]; //Prim算法中的辅助信息
typedef struct
{
VertexData u;
VertexData v;
unsigned int cost; //边的代价
}Arc; //原始图的边信息
void AdjMatrix(unsigned int adjMat[][vexCounts]) //邻接矩阵表示法
{
for (int i = 0; i < vexCounts; i++) //初始化邻接矩阵
for (int j = 0; j < vexCounts; j++)
{
adjMat[i][j] = INFINITE;
}
adjMat[0][1] = 6; adjMat[0][2] = 1; adjMat[0][3] = 5;
adjMat[1][0] = 6; adjMat[1][2] = 5; adjMat[1][4] = 3;
adjMat[2][0] = 1; adjMat[2][1] = 5; adjMat[2][3] = 5; adjMat[2][4] = 6; adjMat[2][5] = 4;
adjMat[3][0] = 5; adjMat[3][2] = 5; adjMat[3][5] = 2;
adjMat[4][1] = 3; adjMat[4][2] = 6; adjMat[4][5] = 6;
adjMat[5][2] = 4; adjMat[5][3] = 2; adjMat[5][4] = 6;
}
int Minmum(struct node * closedge) //返回最小代价边
{
unsigned int min = INFINITE;
int index = -1;
for (int i = 0; i < vexCounts;i++)
{
if (closedge[i].lowestcost < min && closedge[i].lowestcost !=0)
{
min = closedge[i].lowestcost;
index = i;
}
}
return index;
}
void MiniSpanTree_Prim(unsigned int adjMat[][vexCounts], VertexData s)
{
for (int i = 0; i < vexCounts;i++)
{
closedge[i].lowestcost = INFINITE;
}
closedge[s].data = s; //从顶点s开始
closedge[s].lowestcost = 0;
for (int i = 0; i < vexCounts;i++) //初始化辅助数组
{
if (i != s)
{
closedge[i].data = s;
closedge[i].lowestcost = adjMat[s][i];
}
}
for (int e = 1; e <= vexCounts -1; e++) //n-1条边时退出
{
int k = Minmum(closedge); //选择最小代价边
cout << vextex[closedge[k].data] << "--" << vextex[k] << endl;//加入到最小生成树
closedge[k].lowestcost = 0; //代价置为0
for (int i = 0; i < vexCounts;i++) //更新v中顶点最小代价边信息
{
if ( adjMat[k][i] < closedge[i].lowestcost)
{
closedge[i].data = k;
closedge[i].lowestcost = adjMat[k][i];
}
}
}
}
void ReadArc(unsigned int adjMat[][vexCounts],vector<Arc> &vertexArc) //保存图的边代价信息
{
Arc * temp = NULL;
for (unsigned int i = 0; i < vexCounts;i++)
{
for (unsigned int j = 0; j < i; j++)
{
if (adjMat[i][j]!=INFINITE)
{
temp = new Arc;
temp->u = i;
temp->v = j;
temp->cost = adjMat[i][j];
vertexArc.push_back(*temp);
}
}
}
}
bool compare(Arc A, Arc B)
{
return A.cost < B.cost ? true : false;
}
bool FindTree(VertexData u, VertexData v,vector<vector<VertexData> > &Tree)
{
unsigned int index_u = INFINITE;
unsigned int index_v = INFINITE;
for (unsigned int i = 0; i < Tree.size();i++) //检查u,v分别属于哪颗树
{
if (find(Tree[i].begin(), Tree[i].end(), u) != Tree[i].end())
index_u = i;
if (find(Tree[i].begin(), Tree[i].end(), v) != Tree[i].end())
index_v = i;
}
if (index_u != index_v) //u,v不在一颗树上,合并两颗树
{
for (unsigned int i = 0; i < Tree[index_v].size();i++)
{
Tree[index_u].push_back(Tree[index_v][i]);
}
Tree[index_v].clear();
return true;
}
return false;
}
void MiniSpanTree_Kruskal(unsigned int adjMat[][vexCounts])
{
vector<Arc> vertexArc;
ReadArc(adjMat, vertexArc);//读取边信息
sort(vertexArc.begin(), vertexArc.end(), compare);//边按从小到大排序
vector<vector<VertexData> > Tree(vexCounts); //6棵独立树
for (unsigned int i = 0; i < vexCounts; i++)
{
Tree[i].push_back(i); //初始化6棵独立树的信息
}
for (unsigned int i = 0; i < vertexArc.size(); i++)//依次从小到大取最小代价边
{
VertexData u = vertexArc[i].u;
VertexData v = vertexArc[i].v;
if (FindTree(u, v, Tree))//检查此边的两个顶点是否在一颗树内
{
cout << vextex[u] << "---" << vextex[v] << endl;//把此边加入到最小生成树中
}
}
}
int main()
{
unsigned int adjMat[vexCounts][vexCounts] = { 0 };
AdjMatrix(adjMat); //邻接矩阵
cout << "Prim :" << endl;
MiniSpanTree_Prim(adjMat,0); //Prim算法,从顶点0开始.
cout << "-------------" << endl << "Kruskal:" << endl;
MiniSpanTree_Kruskal(adjMat);//Kruskal算法
return 0;
}
最小生成树的两种方法(Kruskal算法和Prim算法)的更多相关文章
- 最小生成树(次小生成树)(最小生成树不唯一) 模板:Kruskal算法和 Prim算法
Kruskal模板:按照边权排序,开始从最小边生成树 #include<algorithm> #include<stdio.h> #include<string.h> ...
- 求最小生成树——Kruskal算法和Prim算法
给定一个带权值的无向图,要求权值之和最小的生成树,常用的算法有Kruskal算法和Prim算法.这两个算法其实都是贪心思想的使用,但又能求出最优解.(代码借鉴http://blog.csdn.net/ ...
- 最小生成树之Kruskal算法和Prim算法
依据图的深度优先遍历和广度优先遍历,能够用最少的边连接全部的顶点,并且不会形成回路. 这样的连接全部顶点并且路径唯一的树型结构称为生成树或扩展树.实际中.希望产生的生成树的全部边的权值和最小,称之为最 ...
- Algorithm --> Kruskal算法和Prim算法
最小生成树之Kruskal算法和Prim算法 Kruskal多用于稀疏图,prim多用于稠密图. 根据图的深度优先遍历和广度优先遍历,可以用最少的边连接所有的顶点,而且不会形成回路.这种连接所有顶点并 ...
- 最小生成数kruskal算法和prim算法
定义 连通图:在无向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该无向图为连通图. 强连通图:在有向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该有向图为强连通图. 连通网:在 ...
- 贪心算法-最小生成树Kruskal算法和Prim算法
Kruskal算法: 不断地选择未被选中的边中权重最轻且不会形成环的一条. 简单的理解: 不停地循环,每一次都寻找两个顶点,这两个顶点不在同一个真子集里,且边上的权值最小. 把找到的这两个顶点联合起来 ...
- 两种方法实现Python二分查找算法
两种方法实现Python二分查找算法 一. ? 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 arr=[1,3,6,9,10,20,30] def findnumber( ...
- FIFO调度算法和LRU算法
一.理论 FIFO:先进先出调度算法 LRU:最近最久未使用调度算法 两者都是缓存调度算法,经常用作内存的页面置换算法. 打一个比方,帮助你理解.你有很多的书,比如说10000本.由于你的书实在太多了 ...
- Redis中持久化的两种方法详解
Redis提供了两种不同的持久化方法来将数据存储到硬盘里面.一种方法叫快照(snapshotting),它可以将存在于某一时刻的所有数据都写入硬盘里;另一种方法教只追加文件(append-only f ...
随机推荐
- pymongo 用户密码连接
# db mongodbdb_mongo_attr = { 'host': '*', 'port': 27, 'database':'tease', 'username':'*v', 'passwor ...
- idea没有import project解决办法
参考:https://blog.csdn.net/zengxiaosen/article/details/52807540
- 解决苹果手机(IOS)input失焦后,页面不恢复的问题
var winHeight = $(window).height(); var u = navigator.userAgent, app = navigator.appVersionvar isIOS ...
- PullToRefreshScrollView刷新图标和字体的设定
首先添加pullrefresh的libaraly 设置下拉刷新上拉加载时的文本和图片,直接在java代码中添加 mPullToRefreshScrollView.getLoadingLayoutPro ...
- mysql8 Could not retrieve transation read-only status server
想回顾下ssm,看着网上别的帖子手动搭了一个,一直报Could not retrieve transation read-only status server , java.sql.SQLExcept ...
- 使用HttpURLConnection通过post请求服务器时,URLEncode编码的必要性
通过Post提交表单数据时,数据类型为x-www-urlencoded,提交到服务器的数据服务器默认是通过URLEncoder.encode()编码过得,所以服务器处理时会用URLDecoder.de ...
- 按钮UIButton的使用
一.使用概要 当添加一个按钮到你的界面,执行以下步骤: 1.在创建时设置按钮的类型. 2.提供一个标题字符串或图像,为您的内容适当调整按钮的大小. 3.连接一个或多个操作按钮的方法. 4.设置自动布局 ...
- Vue Element-Ui 改变el-Input背景样式
Element-ui是一个非常好的UI设计模块,它提供给我们很多好看的按钮样式,非常适用于快速搭建UI,下面说说如果使用了element-ui之后,要更改它默认的el-Input样式应该怎么操作. 使 ...
- Memcached 最新版本发布,不再仅仅是个内存缓存了
导读 Memcached 1.5.18和之后版本可以在服务重启时恢复内存缓存.新版本还通过DAX文件系统挂载来实现缓存持久性功能. 可以通过在启动选项使用该功能: -e /tmpfs_mount/me ...
- 页面的五种布局以及嵌套『Android系列八』
转自:http://blog.csdn.net/dazlly/article/details/7860125 因为学习比较晚,我用的相关版本为SDK4.1.eclipse4.2,而自己看的教材都是低版 ...