linux中断源码分析 - 软中断(四)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/
在上一篇文章中,我们看到中断实际分为了两个部分,俗称就是一部分是硬中断,一部分是软中断。软中断是专门用于处理中断过程中费时费力的操作,而为什么系统要分硬中断和软中断呢?问得明白点就是为什么需要软中断。我们可以试着想想,如果只有硬中断的情况下,我们需要在中断处理过程中执行一些耗时的操作,比如浮点数运算,复杂算法的运算时,其他的外部中断就不能得到及时的响应,因为在硬中断过程中中断是关闭着的,甚至一些很紧急的中断会得不到响应,系统稳定性和及时性都受到很大影响。所以linux为了解决上述这种情况,将中断处理分为了两个部分,硬中断和软中断。首先一个外部中断得到响应时,会先关中断,并进入到硬中断完成较为紧急的操作,然后开中断,并在软中断执行那些非紧急、可延时执行的操作;在这种情况下,紧急操作可以立即执行,而其他的外部中断也可以获得一个较为快速的响应。这也是软中断存在的必要性。在软中断过程中是不可以被抢占也不能被阻塞的,也不能在一个给定的CPU上交错执行。
软中断
软中断是在中断框架中专门用于处理非紧急操作的,在SMP系统中,软中断可以并发地运行在多个CPU上,但在一些路径在需要使用自旋锁进行保护。在系统中,很多东西都分优先级,软中断也不例外,有些软中断要求更快速的响应运行,在内核中软中断一共分为10个,同时也代表着10种不同的优先级,系统用一个枚举变量表示:
enum
{
HI_SOFTIRQ=, /* 高优先级tasklet */ /* 优先级最高 */
TIMER_SOFTIRQ, /* 时钟相关的软中断 */
NET_TX_SOFTIRQ, /* 将数据包传送到网卡 */
NET_RX_SOFTIRQ, /* 从网卡接收数据包 */
BLOCK_SOFTIRQ, /* 块设备的软中断 */
BLOCK_IOPOLL_SOFTIRQ, /* 支持IO轮询的块设备软中断 */
TASKLET_SOFTIRQ, /* 常规tasklet */
SCHED_SOFTIRQ, /* 调度程序软中断 */
HRTIMER_SOFTIRQ, /* 高精度计时器软中断 */
RCU_SOFTIRQ, /* RCU锁软中断,该软中断总是最后一个软中断 */ /* 优先级最低 */ NR_SOFTIRQS /* 软中断数,为10 */
};
注释中的tasklet我们之后会说明,这里先无视它。每一个优先级的软中断都使用一个struct softirq_action结构来表示,在这个结构中,只有一个成员变量,就是action函数指针,因为不同的软中断它的处理方式可能不同,从优先级表中就可以看出来,有块设备的,也有网卡处理的。系统将这10个软中断用softirq_vec[10]的数组进行保存。
/* 用于描述一个软中断 */
struct softirq_action
{
/* 此软中断的处理函数 */
void (*action)(struct softirq_action *);
}; /* 10个软中断描述符都保存在此数组 */
static struct softirq_action softirq_vec[NR_SOFTIRQS] __cacheline_aligned_in_smp;
系统一般使用open_softirq()函数进行软中断描述符的初始化,主要就是将action函数指针指向该软中断应该执行的函数。在start_kernel()进行系统初始化中,就调用了softirq_init()函数对HI_SOFTIRQ和TASKLET_SOFTIRQ两个软中断进行了初始化
void __init softirq_init(void)
{
int cpu; for_each_possible_cpu(cpu) {
per_cpu(tasklet_vec, cpu).tail =
&per_cpu(tasklet_vec, cpu).head;
per_cpu(tasklet_hi_vec, cpu).tail =
&per_cpu(tasklet_hi_vec, cpu).head;
} /* 开启常规tasklet */
open_softirq(TASKLET_SOFTIRQ, tasklet_action);
/* 开启高优先级tasklet */
open_softirq(HI_SOFTIRQ, tasklet_hi_action);
} /* 开启软中断 */
void open_softirq(int nr, void (*action)(struct softirq_action *))
{
softirq_vec[nr].action = action;
}
可以看到,TASKLET_SOFTIRQ的action操作使用了tasklet_action()函数,HI_SOFTIRQ的action操作使用了tasklet_hi_action()函数,这两个函数我们需要结合tasklet进行说明。我们也可以看看其他的软中断使用了什么函数:
open_softirq(TIMER_SOFTIRQ, run_timer_softirq);
open_softirq(NET_TX_SOFTIRQ, net_tx_action);
open_softirq(NET_RX_SOFTIRQ, net_rx_action);
open_softirq(BLOCK_SOFTIRQ, blk_done_softirq);
open_softirq(BLOCK_IOPOLL_SOFTIRQ, blk_iopoll_softirq);
open_softirq(SCHED_SOFTIRQ, run_rebalance_domains);
open_softirq(HRTIMER_SOFTIRQ, run_hrtimer_softirq);
open_softirq(RCU_SOFTIRQ, rcu_process_callbacks);
其实很明显可以看出,除了TASKLET_SOFTIRQ和HI_SOFTIRQ,其他的软中断更多地是用于特定的设备和环境,对于我们普通的IO驱动和设备而已,使用的软中断几乎都是TASKLET_SOFTIRQ和HI_SOFTIRQ,而系统为了对这些不同IO设备进行统一的处理,就在TASKLET_SOFTIRQ和HI_SOFTIRQ的action函数中使用到了tasklet。
对于每个CPU,都有一个irq_cpustat_t的数据结构,里面有一个__softirq_pending变量,这个变量很重要,用于表示该CPU的哪个软中断处于挂起状态,在软中断处理时可以根据此值跳过不需要处理的软中断,直接处理需要处理的软中断。内核使用local_softirq_pending()获取此CPU的__softirq_pending的值。
当使用open_softirq设置好某个软中断的action指针后,该软中断就会开始可以使用了,其实更明了地说,从中断初始化完成开始,即使所有的软中断都没有使用open_softirq()进行初始化,软中断都已经开始使用了,只是所有软中断的action都为空,系统每次执行到软中断都没有软中断需要执行罢了。
在每个CPU上一次软中断处理的一个典型流程是:
- 硬中断执行完毕,开中断。
- 检查该CPU是否处于嵌套中断的情况,如果处于嵌套中,则不执行软中断,也就是在最外层中断才执行软中断。
- 执行软中断,设置一个软中断执行最多使用时间和循环次数(10次)。
- 进入循环,获取CPU的__softirq_pending的副本。
- 执行此__softirq_pending副本中所有需要执行的软中断。
- 如果软中断执行完毕,退出中断上下文。
- 如果还有软中断需要执行(在软中断期间又发发生了中断,产生了新的软中断,新的软中断记录在CPU的__softirq_pending上,而我们的__softirq_pending只是个副本)。
- 检查此次软中断总共使用的时间和循环次数,条件允许继续执行软中断,循环次数减一,并跳转到第4步。
我们具体看一下代码,首先在irq_exit()中会检查是否需要进行软中断处理:
void irq_exit(void)
{
#ifndef __ARCH_IRQ_EXIT_IRQS_DISABLED
local_irq_disable();
#else
WARN_ON_ONCE(!irqs_disabled());
#endif account_irq_exit_time(current);
/* 减少preempt_count的硬中断计数器 */
preempt_count_sub(HARDIRQ_OFFSET); /* in_interrupt()会检查preempt_count上的软中断计数器和硬中断计数器来判断是否处于中断嵌套中 */
/* local_softirq_pending()则会检查该CPU的__softirq_pending变量,是否有软中断挂起 */
if (!in_interrupt() && local_softirq_pending())
invoke_softirq(); tick_irq_exit();
rcu_irq_exit();
trace_hardirq_exit(); /* must be last! */
}
我们再进入到invoke_softirq():
static inline void invoke_softirq(void)
{ if (!force_irqthreads) {
#ifdef CONFIG_HAVE_IRQ_EXIT_ON_IRQ_STACK
/*
* We can safely execute softirq on the current stack if
* it is the irq stack, because it should be near empty
* at this stage.
*/
/* 软中断处理函数 */
__do_softirq();
#else
/*
* Otherwise, irq_exit() is called on the task stack that can
* be potentially deep already. So call softirq in its own stack
* to prevent from any overrun.
*/
do_softirq_own_stack();
#endif
} else {
/* 如果强制使用软中断线程进行软中断处理,会通知调度器唤醒软中断线程ksoftirqd */
wakeup_softirqd();
}
}
重头戏就在__do_softirq()中,我已经注释好了,方便大家看:
asmlinkage __visible void __do_softirq(void)
{
/* 为了防止软中断执行时间太长,设置了一个软中断结束时间 */
unsigned long end = jiffies + MAX_SOFTIRQ_TIME;
/* 保存当前进程的标志 */
unsigned long old_flags = current->flags;
/* 软中断循环执行次数: 10次 */
int max_restart = MAX_SOFTIRQ_RESTART;
/* 软中断的action指针 */
struct softirq_action *h;
bool in_hardirq;
__u32 pending;
int softirq_bit; /*
* Mask out PF_MEMALLOC s current task context is borrowed for the
* softirq. A softirq handled such as network RX might set PF_MEMALLOC
* again if the socket is related to swap
*/
current->flags &= ~PF_MEMALLOC; /* 获取此CPU的__softirq_pengding变量值 */
pending = local_softirq_pending();
/* 用于统计进程被软中断使用时间 */
account_irq_enter_time(current); /* 增加preempt_count软中断计数器,也表明禁止了调度 */
__local_bh_disable_ip(_RET_IP_, SOFTIRQ_OFFSET);
in_hardirq = lockdep_softirq_start(); /* 循环10次的入口,每次循环都会把所有挂起需要执行的软中断执行一遍 */
restart:
/* 该CPU的__softirq_pending清零,当前的__softirq_pending保存在pending变量中 */
/* 这样做就保证了新的软中断会在下次循环中执行 */
set_softirq_pending(); /* 开中断 */
local_irq_enable(); /* h指向软中断数组头 */
h = softirq_vec; /* 每次获取最高优先级的已挂起软中断 */
while ((softirq_bit = ffs(pending))) {
unsigned int vec_nr;
int prev_count;
/* 获取此软中断描述符地址 */
h += softirq_bit - ; /* 减去软中断描述符数组首地址,获得软中断号 */
vec_nr = h - softirq_vec;
/* 获取preempt_count的值 */
prev_count = preempt_count(); /* 增加统计中该软中断发生次数 */
kstat_incr_softirqs_this_cpu(vec_nr); trace_softirq_entry(vec_nr);
/* 执行该软中断的action操作 */
h->action(h);
trace_softirq_exit(vec_nr); /* 之前保存的preempt_count并不等于当前的preempt_count的情况处理,也是简单的把之前的复制到当前的preempt_count上,这样做是防止最后软中断计数不为0导致系统不能够执行调度 */
if (unlikely(prev_count != preempt_count())) {
pr_err("huh, entered softirq %u %s %p with preempt_count %08x, exited with %08x?\n",
vec_nr, softirq_to_name[vec_nr], h->action,
prev_count, preempt_count());
preempt_count_set(prev_count);
}
/* h指向下一个软中断,但下个软中断并不一定需要执行,这里只是配合softirq_bit做到一个处理 */
h++;
pending >>= softirq_bit;
} rcu_bh_qs();
/* 关中断 */
local_irq_disable(); /* 循环结束后再次获取CPU的__softirq_pending变量,为了检查是否还有软中断未执行 */
pending = local_softirq_pending();
/* 还有软中断需要执行 */
if (pending) {
/* 在还有软中断需要执行的情况下,如果时间片没有执行完,并且循环次数也没到10次,继续执行软中断 */
if (time_before(jiffies, end) && !need_resched() &&
--max_restart)
goto restart;
/* 这里是有软中断挂起,但是软中断时间和循环次数已经用完,通知调度器唤醒软中断线程去执行挂起的软中断,软中断线程是ksoftirqd,这里只起到一个通知作用,因为在中断上下文中是禁止调度的 */
wakeup_softirqd();
} lockdep_softirq_end(in_hardirq);
/* 用于统计进程被软中断使用时间 */
account_irq_exit_time(current);
/* 减少preempt_count中的软中断计数器 */
__local_bh_enable(SOFTIRQ_OFFSET);
WARN_ON_ONCE(in_interrupt());
/* 还原进程标志 */
tsk_restore_flags(current, old_flags, PF_MEMALLOC);
}
流程就和上面所说的一致,如果还有不懂,可以去内核代码目录/kernel/softirq.c查看源码。
tasklet
软中断有多种,部分种类有自己特殊的处理,如从NET_TX_SOFTIRQ和NET_RT_SOFTIRQ、BLOCK_SOFTIRQ等,而如HI_SOFTIRQ和TASKLET_SOFTIRQ则是专门使用tasklet。它是在I/O驱动程序中实现可延迟函数的首选方法,如上一句所说,它建立在HI_SOFTIRQ和TASKLET_SOFTIRQ这两种软中断之上,多个tasklet可以与同一个软中断相关联,系统会使用一个链表组织他们,而每个tasklet执行自己的函数处理。而HI_SOFTIRQ和TASKLET_SOFTIRQ这两个软中断并没有什么区别,他们只是优先级上的不同而已,系统会先执行HI_SOFTIRQ的tasklet,再执行TASKLET_SOFTIRQ的tasklet。同一个tasklet不能同时在几个CPU上执行,一个tasklet在一个时间上只能在一个CPU的软中断链上,不能同时在多个CPU的软中断链上,并且当这个tasklet正在执行时,其他CPU不能够执行这个tasklet。也就是说,tasklet不必要编写成可重入的函数。
系统会为每个CPU维护两个链表,用于保存HI_SOFTIRQ的tasklet和TASKLET_SOFTIRQ的tasklet,这两个链表是tasklet_vec和tasklet_hi_vec,它们都是双向链表,如下:
struct tasklet_head {
struct tasklet_struct *head;
struct tasklet_struct **tail;
};
static DEFINE_PER_CPU(struct tasklet_head, tasklet_vec);
static DEFINE_PER_CPU(struct tasklet_head, tasklet_hi_vec);
在softirq_init()函数中,会将每个CPU的tasklet_vec链表和tasklet_hi_vec链表进行初始化,将他们的头尾相连,实现为一个空链表。由于tasklet_vec和tasklet_hi_vec处理方式几乎一样,只是软中断的优先级别不同,我们只需要理解系统如何对tasklet_vec进行处理即可。需要注意的是,tasklet_vec链表都是以顺序方式执行,并不会出现后一个先执行,再到前一个先执行(在软中断期间被中断的情况),之后的代码我们详细说明。
介绍完tasklet_vec和tasklet_hi_vec链表,我们来看看tasklet,tasklet简单来说,就是一个处理函数的封装,类似于硬中断中的irqaction结构。一般来说,在一个驱动中如果需要使用tasklet进行软中断的处理,只需要一个中断对应初始化一个tasklet,它可以在每次中断产生时重复使用。系统使用tasklet_struct结构进行描述一个tasklet,而且对于同一个tasklet_struct你可以选择放在tasklet_hi_vec链表或者tasklet_vec链表上。我们来看看:
struct tasklet_struct
{
struct tasklet_struct *next; /* 指向链表下一个tasklet */
unsigned long state; /* tasklet状态 */
atomic_t count; /* 禁止计数器,调用tasklet_disable()会增加此数,tasklet_enable()减少此数 */
void (*func)(unsigned long); /* 处理函数 */
unsigned long data; /* 处理函数使用的数据 */
};
tasklet状态主要分为以下两种:
- TASKLET_STATE_SCHED:这种状态表示此tasklet处于某个tasklet链表之上(可能是tasklet_vec也可能是tasklet_hi_vec)。
- TASKLET_STATE_RUN:表示此tasklet正在运行中。
这两个状态主要就是用于防止tasklet同时在几个CPU上运行和在同一个CPU上交错执行。
而func指针就是指向相应的处理函数。在编写驱动时,我们可以使用tasklet_init()函数或者DECLARE_TASKLET宏进行一个task_struct结构的初始化,之后可以使用tasklet_schedule()或者tasklet_hi_schedule()将其放到相应链表上等待CPU运行。我们使用一张图描述一下软中断和tasklet结合运行的情况:
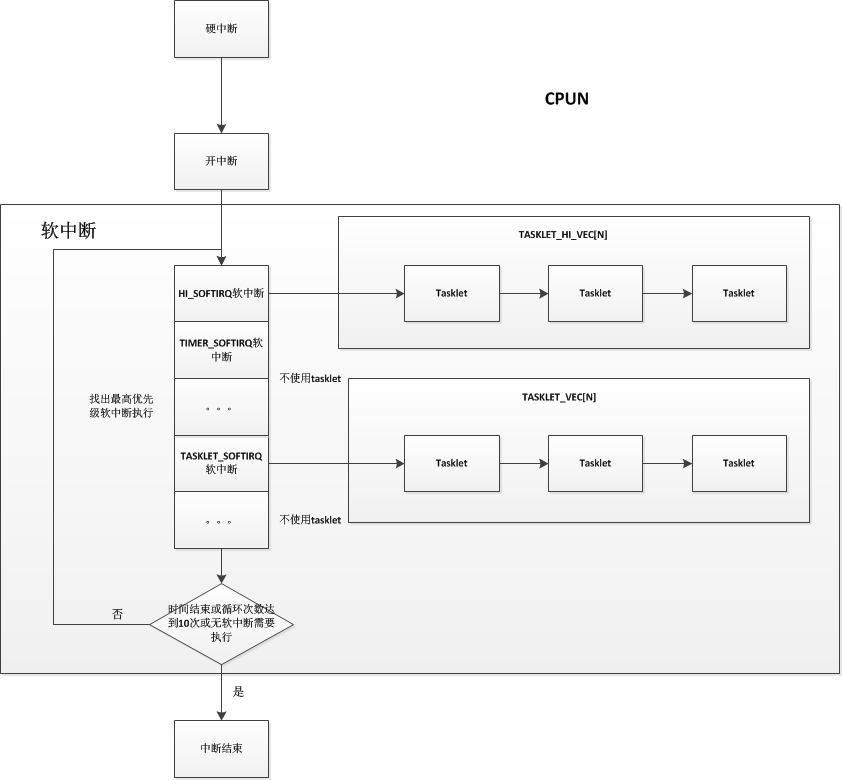
我们知道,每个软中断都有自己的action函数,在HI_SOFTIRQ和TASKLET_SOFTIRQ的action函数中,就用到了它们对应的TASKLET_HI_VEC链表和TASKLET_VEC链表,并依次顺序执行链表中的每个tasklet结点。
在SMP系统中,我们会遇到一个问题:两个CPU都需要执行同一个tasklet的情况,虽然一个tasklet只能放在一个CPU的tasklet_vec链表或者tasklet_hi_vec链表上,但是这种情况是有可能发生的,我们设想一下,中断在CPU1上得到了响应,并且它的tasklet放到了CPU1的tasklet_vec上进行执行,而当中断的tasklet上正在执行时,此中断再次发生,并在CPU2上进行了响应,此时CPU2将此中断的tasklet放到CPU2的tasklet_vec上,并执行到此中断的tasklet。
实际上,为了处理这种情况,在HI_SOFTIRQ和TASKLET_SOFTIRQ的action函数中,会先将对应的tasklet链表取出来,并把对应的tasklet链表的head和tail清空,如果在执行过程中,某个tasklet的state为TASKLET_STATE_RUN状态,说明其他CPU正在处理这个tasklet,这时候当前CPU则会把此tasklet加入到当前CPU已清空的tasklet链表的末尾,然后设置__softirq_pending变量,这样,在下次循环软中断的过程中,会再次检查这个tasklet。也就是如果其他CPU的这个tasklet一直不退出,当前CPU就会不停的置位tasklet的pending,然后不停地循环检查。
我们可以看看TASKLET_SOFTIRQ的action处理:
static void tasklet_action(struct softirq_action *a)
{
struct tasklet_struct *list; local_irq_disable();
/* 将tasklet链表从该CPU中拿出来 */
list = __this_cpu_read(tasklet_vec.head);
/* 将该CPU的此软中断的tasklet链表清空 */
__this_cpu_write(tasklet_vec.head, NULL);
__this_cpu_write(tasklet_vec.tail, this_cpu_ptr(&tasklet_vec.head));
local_irq_enable(); /* 链表已经处于list中,并且该CPU的tasklet_vec链表为空 */
while (list) {
struct tasklet_struct *t = list; list = list->next; /* 检查并设置该tasklet为TASKLET_STATE_RUN状态 */
if (tasklet_trylock(t)) {
/* 检查是否被禁止 */
if (!atomic_read(&t->count)) {
/* 清除其TASKLET_STATE_SCHED状态 */
if (!test_and_clear_bit(TASKLET_STATE_SCHED,
&t->state))
BUG();
/* 执行该tasklet的func处理函数 */
t->func(t->data);
/* 清除该tasklet的TASKLET_STATE_RUN状态 */
tasklet_unlock(t);
continue;
}
tasklet_unlock(t);
} /* 以下为tasklet为TASKLET_STATE_RUN状态下的处理 */
/* 禁止中断 */
local_irq_disable();
/* 将此tasklet添加的该CPU的tasklet_vec链表尾部 */
t->next = NULL;
*__this_cpu_read(tasklet_vec.tail) = t;
__this_cpu_write(tasklet_vec.tail, &(t->next));
/* 设置该CPU的此软中断处于挂起状态,设置irq_cpustat_t的__sofirq_pending变量,这样在软中断的下次执行中会再次执行此tasklet */
__raise_softirq_irqoff(TASKLET_SOFTIRQ);
/* 开启中断 */
local_irq_enable();
}
}
软中断处理线程
当有过多软中断需要处理时,为了保证进程能够得到一个满意的响应时间,设计时给定软中断一个时间片和循环次数,当时间片和循环次数到达但软中断又没有处理完时,就会把剩下的软中断交给软中断处理线程进行处理,这个线程是一个内核线程,其作为一个普通进程,优先级是120。其核心处理函数是run_ksoftirqd(),其实此线程的处理也很简单,就是调用了上面的__do_softirq()函数,我们可以具体看看:
/* 在smpboot_thread_fun的一个死循环中被调用 */
static void run_ksoftirqd(unsigned int cpu)
{
/* 禁止中断,在__do_softirq()中会开启 */
local_irq_disable();
/* 检查该CPU的__softirq_pending是否有软中断被挂起 */
if (local_softirq_pending()) {
/*
* We can safely run softirq on inline stack, as we are not deep
* in the task stack here.
*/
/* 执行软中断 */
__do_softirq();
rcu_note_context_switch(cpu);
/* 开中断 */
local_irq_enable();
/* 检查是否需要调度 */
cond_resched();
return;
}
/* 开中断 */
local_irq_enable();
}
linux中断源码分析 - 软中断(四)的更多相关文章
- linux中断源码分析 - 中断发生(三)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/ 回顾 上篇文章linux中断源码分析 - 初始化(二)已经描述了中断描述符表和中断描述符数组的初始化,由于在初始 ...
- linux中断源码分析 - 初始化(二)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/ 本篇文章主要讲述源码中是如何对中断进行一系列的初始化的. 回顾 在上一篇概述中,介绍了几个对于中断来说非常重要的 ...
- linux中断源码分析 - 概述(一)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/ 关于中断和异常 一般在书中都会把中断和异常一起说明,因为它们具有相同的特点,同时也有不同的地方.在CPU里,中断 ...
- Linux内核源码分析之setup_arch (四)
前言 Linux内核源码分析之setup_arch (三) 基本上把setup_arch主要的函数都分析了,由于距离上一篇时间比较久了,所以这里重新贴一下大致的流程图,本文主要分析的是bootmem_ ...
- Linux内核源码分析--内核启动之(3)Image内核启动(C语言部分)(Linux-3.0 ARMv7)
http://blog.chinaunix.net/uid-20543672-id-3157283.html Linux内核源码分析--内核启动之(3)Image内核启动(C语言部分)(Linux-3 ...
- linux内存源码分析 - 伙伴系统(初始化和申请页框)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/ 之前的文章已经介绍了伙伴系统,这篇我们主要看看源码中是如何初始化伙伴系统.从伙伴系统中分配页框,返回页框于伙伴系 ...
- Linux内核源码分析 day01——内存寻址
前言 Linux内核源码分析 Antz系统编写已经开始了内核部分了,在编写时同时也参考学习一点Linux内核知识. 自制Antz操作系统 一个自制的操作系统,Antz .半图形化半命令式系统,同时嵌入 ...
- linux内存源码分析 - 内存回收(整体流程)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/ 概述 当linux系统内存压力就大时,就会对系统的每个压力大的zone进程内存回收,内存回收主要是针对匿名页和文 ...
- linux内存源码分析 - 内存压缩(实现流程)
本文为原创,转载请注明:http://www.cnblogs.com/tolimit/ 概述 本文章最好结合linux内存管理源码分析 - 页框分配器与linux内存源码分析 -伙伴系统(初始化和申请 ...
随机推荐
- Python全栈学习_day002知识点
今日大纲: . while循环 . 格式化输出 . 运算符 . 编码初识 1. while循环 - while 无限循环: while True: # 死循环 print('大悲咒') print(' ...
- jQuery中是事件绑定方式--on、bind、live、delegate
概述:jQuery是我们最常用的js库,对于事件的绑定也是有很多种,on.one.live.bind.delegate等等,接下来我们逐一来进行讲解. 本片文章中事件所带的为版本号,例:v1.7+为1 ...
- js keyup、keypress和keydown事件
js keyup.keypress和keydown事件都是有关于键盘的事件 当一个按键被pressed 或released在每一个现代浏览器中,都可能有三种客户端事件. keydown event k ...
- MySQl创建用户和授权
权限的管理: 如何创建用户和密码 给当前的用户授权 移除当前用户的权限 首先进去到mysql数据库下: mysql> use mysql Database changed 其次, 对新用户进行增 ...
- 我的Java之旅 第六课 JAVA WEB 请求与响应
一.有关URL编码 1.在URL的规范中定义了一些保留字符,如:: / ? & = @ % 等,在URI中有它的作用.如果要在URI中包含这些字符,必须转码,即%字符后跟十六进 ...
- python 提取linux的硬件信息
1.代码实现目的 注:代码可以直接粘贴使用 为了实现对主机的整体有明确的了解,实现了下面的代码功能 代码主要功能是: 提取到主机的内存.硬盘.CPU.型号等信息 插入到mysql的数据库中 2.代码具 ...
- DirectX SDK (June 2010)安装错误S1023,解决方法
转自:http://hi.baidu.com/rootcat/item/6730f15f85e2c1958c12ed81 DirectX SDK (June 2010)安装错误S1023,解决方法 导 ...
- 06-OpenLDAP密码策略
阅读视图 openldap密码策略 OpenLDAP服务端定制密码策略 客户端策划策略实例 定义用户第一次登录就修改密码 问题排查手册 重点推荐官方文档 备注:本文依然承接系列文. 1. openld ...
- [Winform-WebBrowser]-在html页面中js调用winForm类方法
在winform项目中嵌入了网页,想通过html页面调用后台方法,如何实现呢?其实很简单,主要有三部: 1.在被调用方法类上加上[ComVisible(true)]标签,意思就是当前类可以com组件的 ...
- Linux 小知识翻译 - 「X Window系统」
X Window System是给Unix系的OS提供的一套窗口管理软件或者说是组件.X Window System已经成为了在Linux上使用GUI环境的不可或缺的东西了. X Window Sys ...