目标检测论文解读4——Faster R-CNN
背景
Fast R-CNN中的region proposal阶段所采用的SS算法成为了检测网络的速度瓶颈,本文是在Fast R-CNN基础上采用RPN(Region Proposal Networks)代替SS。
方法
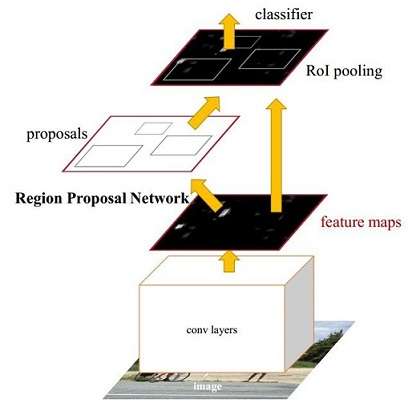
从图中我们可以看到,RPN的输入为最后一个Conv层输出的feature map,输出为一系列ROI,后面的过程就跟Fast R-CNN一样了。
所以在这里我们只需要了解RPN是如何工作的。
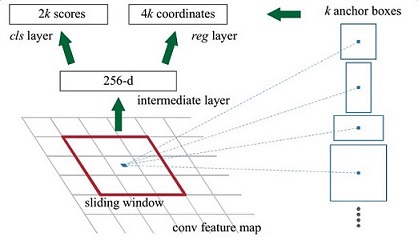
论文里有这样一张图,讲解了RPN的过程(注意后面的k不是千,而是代表每个特征点要预测的anchors个数)。但我觉得可能很多人看到这张图都难以理解,本人也是结合模型的网络结构才理解的,所以我在这里更通俗地解释一下。

论文上的图有点抽象,屏蔽了很多细节部分,初学者看的话可能会似懂非懂,从网络结构上看的话那么RPN的原理就非常清晰了。
假设每个点预测9个Anchor,即k=9
(1)首先,原图片经过一系列卷积,会得到一个feature map,即左下角的256*h*w的FM,作为ROI pooling和RPN的输入;
(2)RPN网络中,256*h*w的FM,先经过256*3*3 Conv+Relu,得到一个新的256*h*w的FM(注意:这里pad=1,所以h和w不变),这个步骤对应论文图中的3*3的sliding window;
(3)新的256*h*w的FM经两个分支,一个是18*1*1 Conv,代表前背景分类分支,输出一个18*h*w的FM,用来预测特征图的每个点所对应的Anchors是为前景还是背景;
(4)另一个是36*1*1 Conv,代表坐标回归分支,输出一个36*h*w的FM,用来预测特征图的每个点所对应的9个Anchors坐标需要调整的大小;
(5)把上面两种预测综合一下,就能得到预测的候选框了,后面的步骤就跟Fast R-CNN一样了。
总结
Faster R-CNN = RPN + Fast R-CNN
目标检测论文解读4——Faster R-CNN的更多相关文章
- AAAI2019 | 基于区域分解集成的目标检测 论文解读
Object Detection based on Region Decomposition and Assembly AAAI2019 | 基于区域分解集成的目标检测 论文解读 作者 | 文永亮 学 ...
- 目标检测论文解读3——Fast R-CNN
背景 deep ConvNet兴起,VGG16应用在图像分类任务上表现良好,本文用VGG16来解决检测任务.SPP NET存在CNN层不能fine tuning的缺点,且之前的方法训练都是分为多个阶段 ...
- 目标检测论文解读5——YOLO v1
背景 之前热门的目标检测方法都是two stage的,即分为region proposal和classification两个阶段,本文是对one stage方法的初次探索. 方法 首先看一下模型的网络 ...
- 目标检测论文解读1——Rich feature hierarchies for accurate object detection and semantic segmentation
背景 在2012 Imagenet LSVRC比赛中,Alexnet以15.3%的top-5 错误率轻松拔得头筹(第二名top-5错误率为26.2%).由此,ConvNet的潜力受到广泛认可,一炮而红 ...
- 目标检测论文解读10——DSSD
背景 SSD算法在检测小目标时精度并不高,本文是在在SSD的基础上做出一些改进,引入卷积层,能综合上下文信息,提高模型性能. 理解 Q1:DSSD和SSD的区别有哪些? (1)SSD是一层一层下采样, ...
- 目标检测论文解读13——FPN
引言 对于小目标通常需要用到多尺度检测,作者提出的FPN是一种快速且效果好的多尺度检测方法. 方法 a,b,c是之前的方法,其中a,c用到了多尺度检测的思想,但他们都存在明显的缺点. a方法:把每图片 ...
- 目标检测论文解读12——RetinaNet
引言 这篇论文深刻分析了one-stage的模型精度比two-stage更差的原因,并提出Focal Loss提高精度. 思路 在论文中,作者指出,造成one-stage模型精度差的原因主要是:正负样 ...
- 目标检测论文解读9——R-FCN
背景 基于ResNet 101的Faster RCNN速度很慢,本文通过提出Position-sensitive score maps(位置敏感分值图)来给模型加速. 方法 首先分析一下,为什么基于R ...
- 目标检测论文解读6——SSD
背景 R-CNN系列算法检测速度不够快,YOLO v1检测准确率较低,而且无法检测到密集目标. 方法 SSD算法跟YOLO类似,都属于one stage的算法,即通过回归算法直接从原图得到预测结果,为 ...
随机推荐
- Redis有效时间设置及时间过期处理
本文对redis的过期处理机制做个简单的概述,让大家有个基本的认识. Redis中有个设置时间过期的功能,即对存储在redis数据库中的值可以设置一个过期时间.作为一个缓存数据库,这是非常实用的.如我 ...
- Webdriver get(url)加载时间太长
运行Selenium脚本时,发现有时候由于网络或性能问题,加载网页时间太长,无法继续执行后续操作,但是实际上元素都已经加载出来了. 解决 # 设置页面加载超时时间 d.set_page_load_ti ...
- log4net按级别写到不同文件
<?xml version="1.0" encoding="utf-8"?> <configuration> <configSec ...
- 几句话总结一个算法之DQN
DQN利用深度学习对Q-learning的一个扩展,回顾上篇文章,Q-learning的核心在于Q(s,a)的建模.如果状态s非常复杂,很难通过一张表来存储所有的状态. 深度学习正好可以自动提取s的特 ...
- 2018-2019-2 20165315《网络对抗技术》Exp9 Web安全基础
2018-2019-2 20165315<网络对抗技术>Exp9 Web安全基础 目录 一.实验内容 二.实验步骤 1.Webgoat前期准备 2.SQL注入攻击 Command Inje ...
- [转帖]图解分布式一致性协议Paxos
图解分布式一致性协议Paxos https://www.cnblogs.com/hugb/p/8955505.html Paxos协议/算法是分布式系统中比较重要的协议,它有多重要呢? <分 ...
- netcore3.0 webapi集成Swagger 5.0,Swagger使用
Swagger使用 1.描述 Swagger 是一个规范和完整的框架,用于生成.描述.调用和可视化 RESTful 风格的 Web 服务. 作用: 1.接口的文档在线自动生成. 2.功能测试 本文转自 ...
- 可落地的DDD的(2)-为什么说MVC工程架构已经过时
摘要 mvc是一种软件设计模式,最早由Trygve Reenskaug在1978年提出,他有效的解决了表示层,控制器层,逻辑层的代码混合在一起的问题,很好的做到了职责分离.但是在实际的编码实践过程中, ...
- MVC中使用SignalR打造酷炫实用的即时通讯功能(轉載)
資料來源:http://www.fangsi.net/1144.html 前言,现在这世道写篇帖子没个前言真不好意思发出来.本贴的主要内容来自于本人在之前项目中所开发的一个小功能,用于OA中的即时通讯 ...
- Pika 连接 rabbitmq 集群
原文:https://blog.csdn.net/Tech_Salon/article/details/82890431 使用 Pika 连接 rabbitmq 集群使用 python 编程经常会用到 ...