在MATPool矩池云完成Pytorch训练MNIST数据集
本文为矩池云入门手册的补充:Pytorch训练MNIST数据集代码运行过程。
案例代码和对应数据集,以及在矩池云上的详细操作可以在矩池云入门手册中查看,本文基于矩池云入门手册,默认用户已经完成了机器租用,上传解压好了数据、代码,并使用jupyter lab进行代码运行。
在MATPool矩池云完成Pytorch训练MNIST数据集
1. 安装自己需要的第三方包
以tqdm包为例子,如果在运行代码过程出现了ModuleNotFoundError: No module named 'tqdm',说明我们选择的系统镜像中没有预装这个包,我们只需要再JupyterLab的Terminal输入pip install tqdm即可安装相关包。

其他自己需要的第三方包安装方法也类似。
2. 在JupyterLab中运行代码
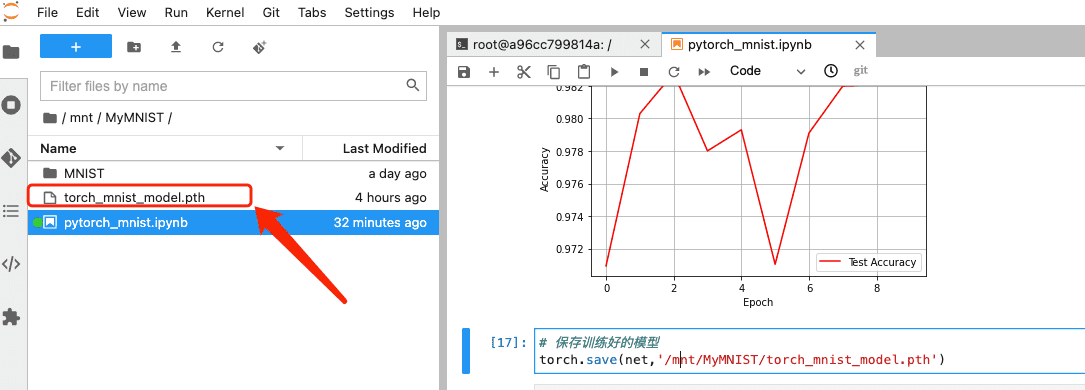
JupyterLab目录里面,我们依次点击mnt->MyMNIST进入到项目文件夹,在项目文件夹下双击pytorch_mnist.ipynb文件,即可打开代码文件。
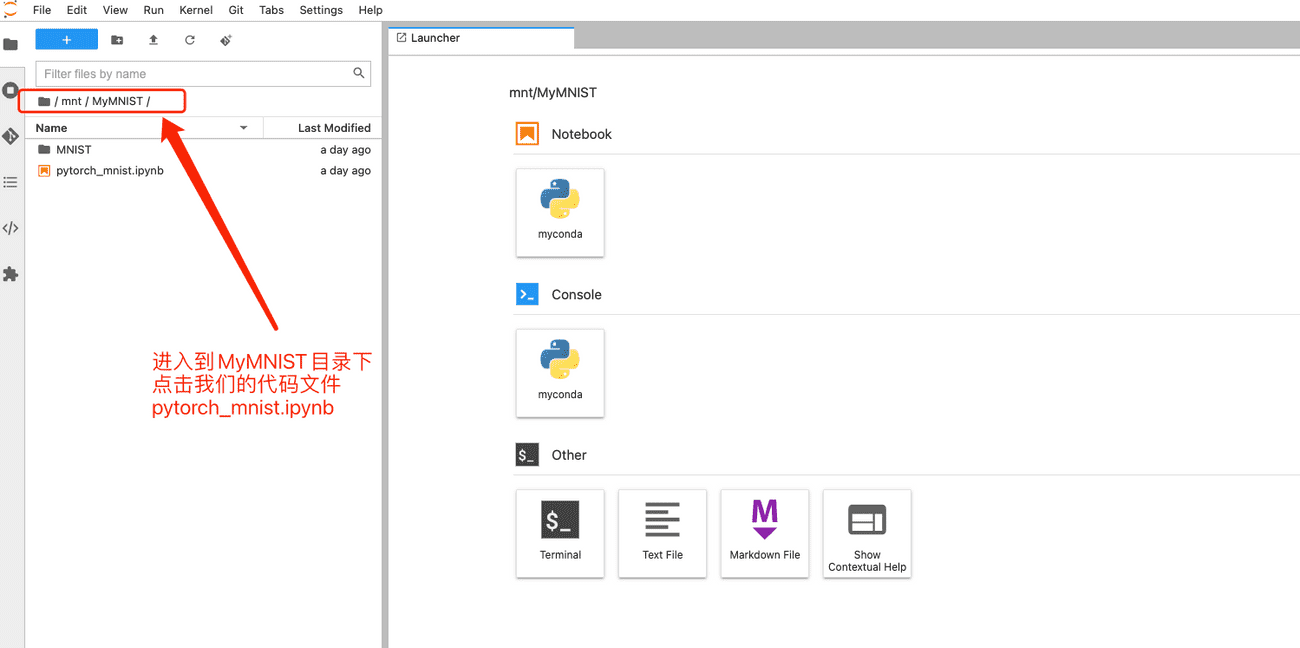
打开代码文件后,我们就可以直接运行了,截图中给大家说明了几个常用的JupyteLab 按钮功能。
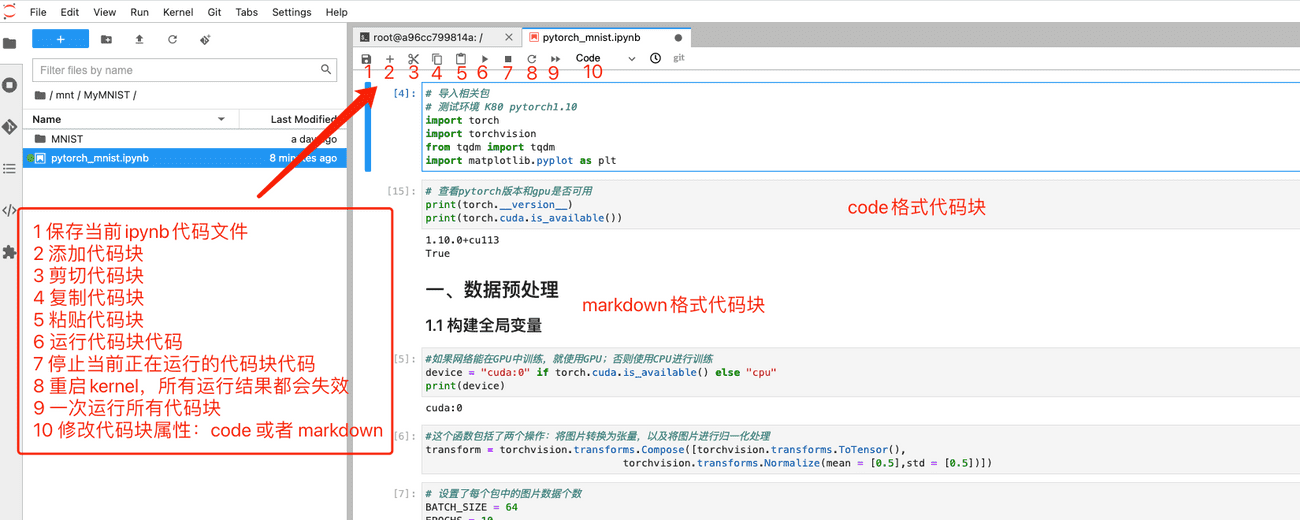
接下来我们开始运行代码~
2.1 导入需要的Python包
首先运行下面代码导入需要的模块,如:
- pytorch相关:torch、torchvision
- 训练输出进度条可视化显示:tqdm
- 训练结果图表可视化显示:matplotlib.pyplot
# 导入相关包
# 测试环境 K80 pytorch1.10
import torch
import torchvision
from tqdm import tqdm
import matplotlib.pyplot as plt
测试下机器中的pytorch版本和GPU是否可用。
# 查看pytorch版本和gpu是否可用
print(torch.__version__)
print(torch.cuda.is_available())
'''
输出:
1.10.0+cu113
True
'''
上面输出表示pytorch版本为1.10.0,机器GPU可用。
2.2 数据预处理
设置device、BATCH_SIZE和EPOCHS
# 如果网络能在GPU中训练,就使用GPU;否则使用CPU进行训练
device = "cuda:0" if torch.cuda.is_available() else "cpu"
# 这个函数包括了两个操作:将图片转换为张量,以及将图片进行归一化处理
transform = torchvision.transforms.Compose([torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean = [0.5],std = [0.5])])
# 设置了每个包中的图片数据个数
BATCH_SIZE = 64
EPOCHS = 10
加载构建训练和测试数据集
# 从项目文件中加载训练数据和测试数据
train_dataset = torchvision.datasets.MNIST('/mnt/MyMNIST/',train = True,transform = transform)
test_dataset = torchvision.datasets.MNIST('/mnt/MyMNIST/',train = False,transform = transform)
# 建立一个数据迭代器
# 装载训练集
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=BATCH_SIZE,
shuffle=True)
# 装载测试集
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=BATCH_SIZE,
shuffle=True)
2.3 构建数据训练模型并创建实例
构建数据训练模型
# 一个简单的卷积神经网络
class Net(torch.nn.Module):
def __init__(self):
super(Net,self).__init__()
self.model = torch.nn.Sequential(
#The size of the picture is 28x28
torch.nn.Conv2d(in_channels = 1,out_channels = 16,kernel_size = 3,stride = 1,padding = 1),
torch.nn.ReLU(),
torch.nn.MaxPool2d(kernel_size = 2,stride = 2),
#The size of the picture is 14x14
torch.nn.Conv2d(in_channels = 16,out_channels = 32,kernel_size = 3,stride = 1,padding = 1),
torch.nn.ReLU(),
torch.nn.MaxPool2d(kernel_size = 2,stride = 2),
#The size of the picture is 7x7
torch.nn.Conv2d(in_channels = 32,out_channels = 64,kernel_size = 3,stride = 1,padding = 1),
torch.nn.ReLU(),
torch.nn.Flatten(),
torch.nn.Linear(in_features = 7 * 7 * 64,out_features = 128),
torch.nn.ReLU(),
torch.nn.Linear(in_features = 128,out_features = 10),
torch.nn.Softmax(dim=1)
)
def forward(self,input):
output = self.model(input)
return output
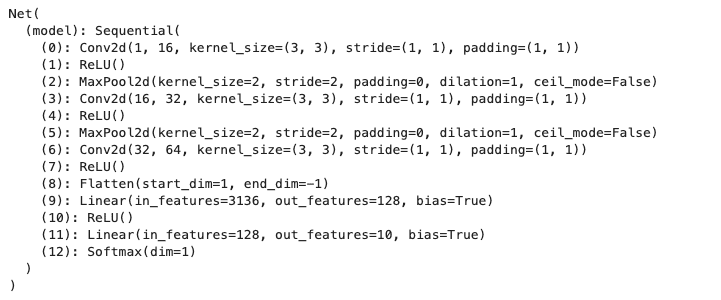
构建模型实例
# 构建模型实例
net = Net()
# 将模型转换到device中,并将其结构显示出来
print(net.to(device))
2.4 构建迭代器与损失函数
# 交叉熵损失来作为损失函数
# Adam迭代器
loss_fun = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net.parameters())
2.5 构建并运行训练循环
history = {'Test Loss':[],'Test Accuracy':[]}
for epoch in range(1,EPOCHS + 1):
process_bar = tqdm(train_loader,unit = 'step')
net.train(True)
for step,(train_imgs,labels) in enumerate(process_bar):
train_imgs = train_imgs.to(device)
labels = labels.to(device)
net.zero_grad()
outputs = net(train_imgs)
loss = loss_fun(outputs,labels)
predictions = torch.argmax(outputs, dim = 1)
accuracy = torch.true_divide(torch.sum(predictions == labels), labels.shape[0])
loss.backward()
optimizer.step()
process_bar.set_description("[%d/%d] Loss: %.4f, Acc: %.4f" %
(epoch,EPOCHS,loss.item(),accuracy.item()))
if step == len(process_bar)-1:
correct,total_loss = 0,0
net.train(False)
with torch.no_grad():
for test_imgs,labels in test_loader:
test_imgs = test_imgs.to(device)
labels = labels.to(device)
outputs = net(test_imgs)
loss = loss_fun(outputs,labels)
predictions = torch.argmax(outputs,dim = 1)
total_loss += loss
correct += torch.sum(predictions == labels)
test_accuracy = torch.true_divide(correct, (BATCH_SIZE * len(test_loader)))
test_loss = torch.true_divide(total_loss, len(test_loader))
history['Test Loss'].append(test_loss.item())
history['Test Accuracy'].append(test_accuracy.item())
process_bar.set_description("[%d/%d] Loss: %.4f, Acc: %.4f, Test Loss: %.4f, Test Acc: %.4f" %
(epoch,EPOCHS,loss.item(),accuracy.item(),test_loss.item(),test_accuracy.item()))
process_bar.close()

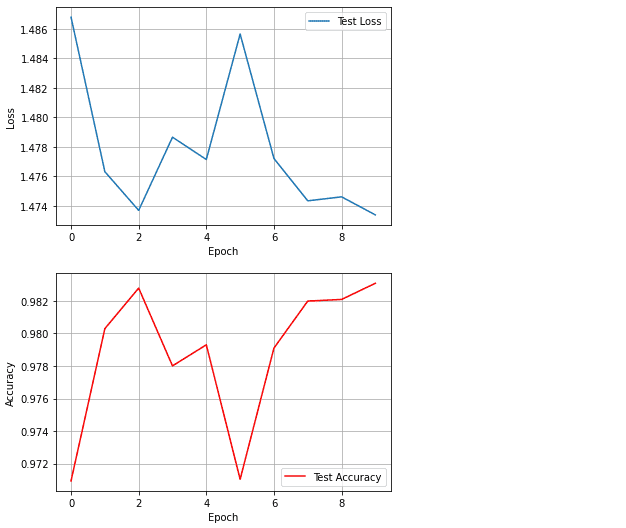
2.6 训练结果可视化
#对测试Loss进行可视化
plt.plot(history['Test Loss'],label = 'Test Loss')
plt.legend(loc='best')
plt.grid(True)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.show()
#对测试准确率进行可视化
plt.plot(history['Test Accuracy'],color = 'red',label = 'Test Accuracy')
plt.legend(loc='best')
plt.grid(True)
plt.xlabel('Epoch')
plt.ylabel('Accuracy')
plt.show()
2.7 保存模型
# 保存训练好的模型
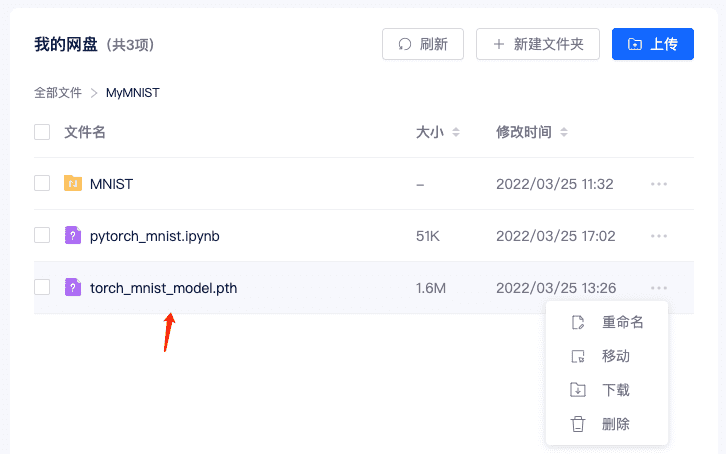
torch.save(net,'/mnt/MyMNIST/torch_mnist_model.pth')
保存成功后,JupyterLab 中对应文件夹会出现该文件,在矩池云网盘对应目录下也会存在。
参考文章
在MATPool矩池云完成Pytorch训练MNIST数据集的更多相关文章
- 矩池云上安装yolov4 darknet教程
这里我是用PyTorch 1.8.1来安装的 拉取仓库 官方仓库 git clone https://github.com/AlexeyAB/darknet 镜像仓库 git clone https: ...
- 矩池云 | 高性价比的GPU租用深度学习平台
矩池云是一个专业的国内深度学习云平台,拥有着良好的深度学习云端训练体验.在性价比上,我们以 2080Ti 单卡为例,36 小时折扣后的价格才 55 元,每小时单价仅 1.52 元,属于全网最低价.用户 ...
- 矩池云上TensorBoard/TensorBoardX配置说明
Tensorflow用户使用TensorBoard 矩池云现在为带有Tensorflow的镜像默认开启了6006端口,那么只需要在租用后使用命令启动即可 tensorboard --logdir lo ...
- 矩池云助力科研算力免费上"云",让 AI 教学简单起来
矩池云是一个专业的国内深度学习云平台,拥有着良好的深度学习云端训练体验,和高性价比的GPU集群资源.而且对同学们比较友好,会经常做一些大折扣的活动,最近双十一,全场所有的RTX 2070.Platin ...
- 在矩池云使用Disco Diffusion生成AI艺术图
在 Disco Diffusion 官方说明的第一段,其对自身是这样定义: AI Image generating technique called CLIP-Guided Diffusion.DD ...
- 在矩池云上复现 CVPR 2018 LearningToCompare_FSL 环境
这是 CVPR 2018 的一篇少样本学习论文:Learning to Compare: Relation Network for Few-Shot Learning 源码地址:https://git ...
- 用端口映射的办法使用矩池云隐藏的vnc功能
矩池云隐藏了很多高级功能待用户去挖掘. 租用机器 进入jupyterlab 设置vnc密码 VNC_PASSWD="userpasswd" ./root/vnc_startup.s ...
- 矩池云上安装ikatago及远程链接教程
https://github.com/kinfkong/ikatago-resources/tree/master/dockerfiles 从作者的库中可以看到,该程序支持cuda9.2.cuda10 ...
- 使用 MobaXterm 连接矩池云 GPU服务器
Host Name(主机名):hz.matpool.com 或 hz-t2.matpool.com,请以您 SSH 中给定的域名为准. Port(端口号):矩池云租用记录里 SSH 链接里冒号后的几位 ...
- 如何使用 PuTTY 远程连接矩池云主机
PuTTY 是一款开源的连接软件,用来远程连接服务器,支持 SSH.Telnet.Serial 等协议. 矩池云的主机支持 SSH 登录,以下为使用 PuTTY 连接矩池云 GPU 的使用教程. 如您 ...
随机推荐
- [转帖]原创经典:SQLSERVER SendStringParametersAsUnicode引发的疑案 推荐
https://developer.aliyun.com/article/429563 简介: 上周五碰到开发的请求协助解决数据预定程序中对单头等几个表检索数据时检索条件尾数是9的数据特别慢.第一时间 ...
- 最佳实践:基于vite3的monorepo前端工程搭建
一.技术栈选择 1.代码库管理方式-Monorepo: 将多个项目存放在同一个代码库中 选择理由1:多个应用(可以按业务线产品粒度划分)在同一个repo管理,便于统一管理代码规范.共享工作流 选择理由 ...
- Typescript中存取器getters和setters的使用
1.存取器 存取器可以让我们可以有效的控制对,对象中的中的成员的访问. 可以通过getters和setters来进行操作 在typescript中分别对应 get 和 set 2.如何解决报错 typ ...
- 开源项目02-OSharp
项目名称:OSharp 项目所用技术栈: osharp netstandard aspnetcore osharpns ng-alain angular等 项目简介: OSharp是一个基于.NetC ...
- 如何区分Unity国内版和国际版
从这三个地方都可以判断使用的Unity是国内版本还是国际版,国内版的版本号后面会多出c1,而国际版则不会有c1结尾. 安装目录名 unity hub - 安装 - 查看当前安装的Unity各版本 un ...
- docker安装oracle数据
docker安装oracle数据库 1️⃣ 通过docker拉取并启动oracle11g(此版本目前主流),docker换源及安装mysql看Springboot创建项目及测试 - $YX$ - 博客 ...
- 小知识:MySQL配置文件优先级
今天在RHEL7上,严格按之前的安装规范文档,部署MySQL环境时,发现通过服务的方式启动MySQL失败: 关键错误是: log-error set to '/var/log/mariadb/mari ...
- 17.2 内存映射文件的一致性--《Windows核心编程》
系统允许我们把同一个文件映射到多个视图中,只要映射的是同一个文件映射对象,系统会保证各视图中数据是一致的.例如一个程序修改了一个视图内的内容,那么系统会更新所有其他视图(对应同一文件映射对象)中的内容 ...
- delphi TThread.WaitFor 用法
在 Delphi 中,TThread.WaitFor 方法用于等待一个线程完成执行.当你创建一个线程并希望主线程(或其他线程)等待这个线程结束时,你可以使用这个方法. 以下是 TThread.Wait ...
- Linux-CentOS7登录页面出现Hint: caps lock on,输入大小写字母反了(大小写反转问题)
问题描述:虚拟机CentOS7,输入大小写字母反了,开启capslock的时候变成小写字母了,关闭则变成大写了... 解决办法:只需要执行:setleds +caps 或 setleds -caps ...