STM32-增量式旋转编码器测量
Development kit:MDK5.14
IDE:UV4
MCU:STM32F103C8T6
一、增量式旋转编码器
1、简介
- 编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。
- 按照读出方式编码器可以分为接触式和非接触式两种;
- 按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
- 旋转编码器是集光机电技术于一体的速度位移传感器。它将被测的角位移直接转换成数字信号(高速脉冲信号)。
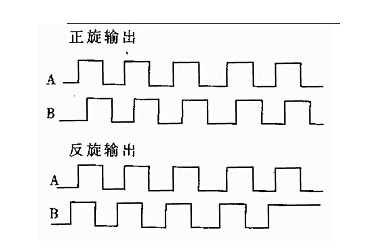
- 我们通常用的是增量型编码器,可将旋转编码器的输出脉冲信号直接输入给PLC,利用PLC的高速计数器对其脉冲信号进行计数,以获得测量结果。不同型号的旋转编码器,其输出脉冲的相数也不同,有的旋转编码器输出A、B、Z三相脉冲,有的只有A、B相两相,最简单的只有A相。A、B为相差90度的脉冲,Z相信号在编码器旋转一圈只有一个脉冲,通常用来做零点的依据,连接时要注意PLC输入的响应时间。旋转编码器还有一条屏蔽线,使用时要将屏蔽线接地,提高抗干扰性。
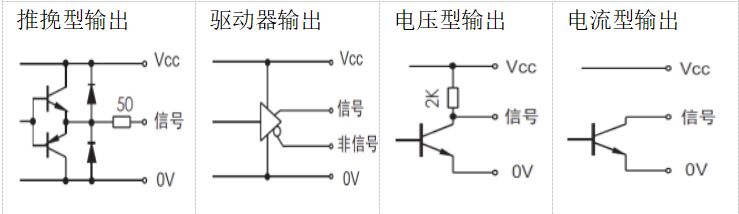
- 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。如单相联接,用于单方向计数,单方向测速。A.B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位置测量。A、A-,B、B-,Z、Z-连接,由于带有对称负信号的连接,在后续的差分输入电路中,将共模噪声抑制,只取有用的差模信号,因此其抗干扰能力强,可传输较远的距离。对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。
- 线数:旋转一周信号线输出脉冲数,也成为分辨率
2、型号
博主此篇文章使用的旋转编码器型号有两种。
| 型号 | 供电电压 | 输出方式 | 分辨率 | 品牌/厂家 | 输出电平 |
| S20-1000型拉线位移传感器 | 5-24V | NPN集电极开路 | 400 | Omron/欧姆龙 | |
|
DT100E40R1024-HI 增量型大孔径编码器 |
5-30V | HTL(推挽式) | 1024 |
冬莅自动化技术(上海)有限公司 www.shdongli.cn |
高:VCC*70% 低:1V |
二、硬件设计
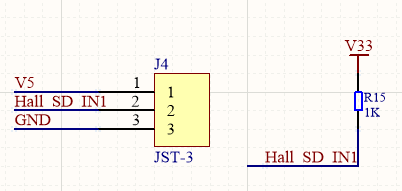
由于增量型编码器输出脉冲,可以直接接入PLC单片机,利用PLC高速计数器进行测量。将编码器接入STM32单片机需要一个定时器资源,并将定时器配置为编码器模式,稍后会简要介绍配置方法。根据传感器的输出方式,进而来判断是否需要进行信号预处理。对于集电极开路输出的传感器接入必须使用上拉电阻。注意STM32大多数引脚的输入电压都在3.3V左右,尽量不要过压。如果电压较大,最好加隔离电路,比如6N136光耦,类似下图

我在这里并没有使用隔离电路,而是对传感器统一使用了5V供电,并在信号接入端人为加了3.3V上拉(上拉电阻1K),这种接口电路在我自己设计的采集板上统一留出了8个。编码器应用中并未使用Z相,仅使用了A、B两相进行编码器计数。按照线序说明接入STM32的定时器引脚,PA6、PA7对应TIM3的CH1、CH2通道,PB6、PB7对应TIM4的CH1、CH2通道。对于第二种传感器的推挽输出方式而言,实验证明这种接入电路也是可行的。(具体电路没有进行分析,只是图个方便。但是5*70%=3.5V应该是勉强可以直接接入stm32引脚的)
三、软件设计
1、STM32定时器编码器模式简介
参考官方文档,摘录几个要点:
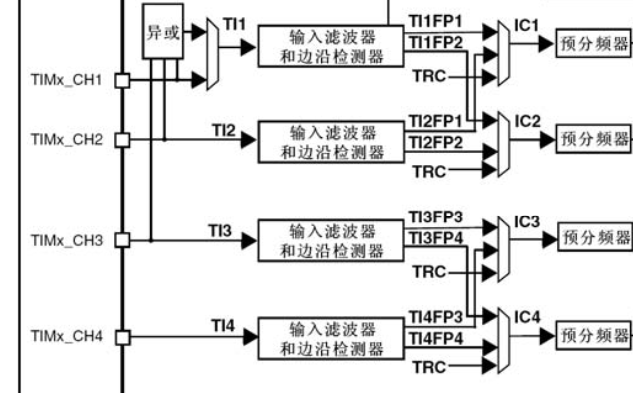
- 编码器接口模式基本上相当于使用了一个带有方向选择的外部时钟。
- 两个输入TI1和TI2被用来最为增量编码器的接口,TI1FP1和TI2FP2是TI1和TI2在通过滤波器和极性控制后的信号,计数器由每次在TI1FP1和TI2FP2的有效跳变驱动,根据跳变顺序,产生计数脉冲和方向信号,计数器向上或向下计数,同时硬件对TIMx_CR1寄存器的DIR位进行相应设计
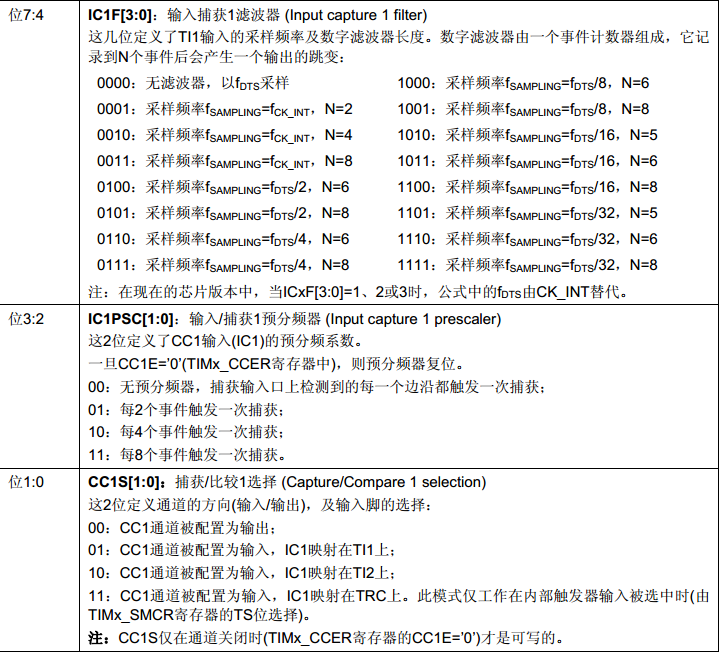
- IC1、TI1概念理解:TI1是定时器输入通道,IC1是输入捕获通道(两者可以交错)。配置CCMR1寄存器的CC1S位可以指定IC1的映射方式。可配置滤波器和预分频器。
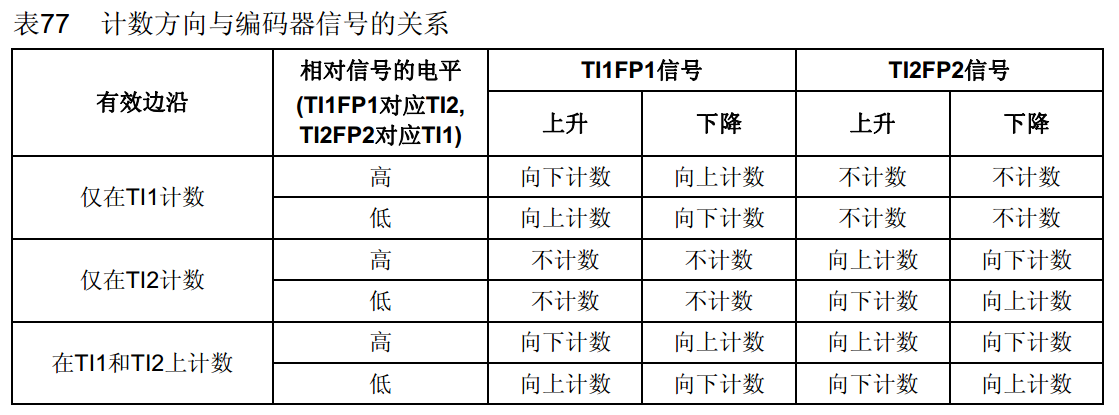
- 计数方向与编码器信号的关系
2、软件实现
/******************************************** TIM3、TIM4定时器编码器模式配置 *********************************************/ #include "sys.h"
#include "encoder.h" int TIM3ITCount=;//中断溢出次数
int TIM4ITCount=;//中断溢出次数 void TIM3_IRQHandler(void)
{
if(TIM3->SR&0x0001)//溢出中断
{ }
TIM3->SR&=~(<<);//清除标志位
} void TIM4_IRQHandler(void)
{
if(TIM4->SR&0x0001)//溢出中断
{
}
TIM4->SR&=~(<<);//清除标志位
} void TIM3_Encoder_Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; //时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能 TIM3 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能 GPIOA 时钟 //GPIO配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //PA6、PA7设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化 GPIOA //定时器初始化
TIM_DeInit(TIM3);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period =;//预装载值
TIM_TimeBaseStructure.TIM_Prescaler = ;//预分频
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //编码器模式配置
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Falling, TIM_ICPolarity_Falling);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ;//ICx_FILTER;
TIM_ICInit(TIM3, &TIM_ICInitStructure); //初始化 NVIC 中断优先级分组
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ; //先占优先级 2 级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ; //从优先级 0 级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化 NVIC //中断配置
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); //Reset counter
TIM3->CNT = ;
//使能定时器
TIM_Cmd(TIM3, ENABLE);
} void TIM4_Encoder_Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; //时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能 TIM4 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能 GPIOB 时钟 //GPIO配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //PB6、PB7设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 GPIOA //定时器初始化
TIM_DeInit(TIM4);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period =;//预装载值
TIM_TimeBaseStructure.TIM_Prescaler = ;//预分频
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //编码器模式配置
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Falling, TIM_ICPolarity_Falling);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ;//ICx_FILTER;
TIM_ICInit(TIM4, &TIM_ICInitStructure); //初始化 NVIC 中断优先级分组
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM4 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ; //先占优先级 2 级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ; //从优先级 0 级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化 NVIC //中断配置
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //Reset counter
TIM4->CNT = ;
//使能定时器
TIM_Cmd(TIM4, ENABLE);
}
encoder.c
3、注意事项
- 更新中断可以不开。但是由于没有使用Z相信号,所以这里保留更新中断,实际上目前中断里什么也没做
- 由于是双相下降沿计数,所以转一次会输出两个脉冲,转一周脉冲数为分辨率*2,注意处理。当然你也可以配置为其它计数倍数
- 这里预装载65535,可改为线数*2,即可对转一周的位置进行严格编码
- TIMx->CNT的值即为编码器的位置(并不一定是输出脉冲值,跟旋转方向和预装载值有关,增量编码器的零点是初始化自己定义的)
- GPIO配置为浮空输入模式。对于集电极开路输出的编码器,如果你没有外部上拉,则使用内部上拉,配置为上拉输入模式即可。
参考资料:
STM32-增量式旋转编码器测量的更多相关文章
- AVR单片机教程——旋转编码器
好久没写这个系列了.今天讲讲旋转编码器. 旋转编码器好像不是单片机玩家很常用的器件,但是我们的开发板上有,原因如下: 旋转编码器挺好用的.电位器能旋转的角度有限,旋转编码器可以无限圈旋转:旋转时不连续 ...
- T12焊台控制器制作教程 | T12烙铁 | PID增量式算法恒温控制 | 运算放大器-热电偶电压采集 | OLED屏幕显示-SPI通信 | 旋转编码器EC11用户操作
前言 购买T12烙铁的相关配件已经1年多了,期间也尝试了一些开源的T12控制器,但都没有成功,要么是配套资料少,要么是英文的,其中51和arduino的居多,STM32的较少.求人不如求己,索性自己开 ...
- 增量式PID的stm32实现(转)
源:增量式PID的stm32实现,整定过程 首先说说增量式PID的公式,这个关系到MCU算法公式的书写,实际上两个公式的写法是同一个公式变换来得,不同的是系数的差异. 资料上比较多的是: 还有一种是: ...
- 增量式PID简单翻板角度控制
1.研究背景 随着电子技术.信息技术和自动控制理论技术的完善与发展,近来微型处理器在控制方面的应用也越来越多.随之逐渐渗透到我们生活的各个领域.如导弹导航装置,飞机上仪表的控制,网络通讯与数据传输,工 ...
- 「雕爷学编程」Arduino动手做(40)——旋转编码器模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里 ...
- 【Arduino】旋转编码器的Arduino使用方法
以前用CRT显示器的时候,调整显示器的时候用一个圆盘转动和点击的方法就可以实现选择菜单和修改设置项的值,比多个按钮的方式方便很多. 鼠标滚轮也是这种操作方法,旋转+点击,只是方向不同.最近在网上买了旋 ...
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- Arduino关于旋转编码器程序的介绍(Reading Rotary Encoders)--by Markdown
介绍 旋转或编码器是一个角度測量装置. 他用作精确測量电机的旋转角度或者用来控制控制轮子(能够无限旋转,而电位器只能旋转到特定位置).其中有一些还安装了一个能够在轴上按的button,就像音乐播放器的 ...
- J20航模遥控器开源项目系列教程(七)PPM输出 | 关于按键版本和旋转编码器版本的兼容说明、布局建议 | 关于MINI版PCB的兼容说明
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/J ...
随机推荐
- sql中从指定位置截取指定长度字符串
1. 字符串函数应用 --从指定索引截取指定长度的字符串 ,) --获取字符串中指定字符的索引(从1开始) select charindex(',','ab,cdefg') --实际应用中的语句 , ...
- 在Linux下删除文件及文件夹(rm)
删除目录.文件 rm(remove) 功能说明:删除文件或目录.语 法:rm [-dfirv][--help][--version][文件或目录...]补充说明:执行rm指令可删除文件或目录,如欲删除 ...
- Linux汇编与C互相调用
一.简介 C语言调用汇编有两种方式:1.通过内嵌汇编 2.通过编译链接. 二.基础知识 对于C和汇编语言的接口主要有两个问题需要解决 1.调用者与被调用者的参数传递 正常的,定义一个函数总是希望它完 ...
- qt4代码到qt5代码出错
1.error C2039: “toAscii”: 不是“QString”的成员 QT5.0.1把这个函数取消掉了,可以用toLatin1这个函数
- deploy: [mkdir] Created dir: C:\Program Files\Java\apache-cxf-2.4.2\samples\java_first_pojo\build [loadfile] Do not set property srcbuild.classpath as its length is 0.
使用CXF的错误,错误是说我的路径有错误,因为路径错误所以无法运行程序 (1)原因,我将其放入了Program Files文件夹下,所以,其不好使 分析原因: 目录路径错误,目录中不能有空格,否则其解 ...
- 在Word 中撰写并发布到博客的帮助
目前大部分的博客作者在用Word写博客这件事情上都会遇到以下3个痛点: 1.所有博客平台关闭了文档发布接口,用户无法使用Word,Windows Live Writer等工具来发布博客.使用Word写 ...
- Web图片编辑控件升级日志-Xproer.ImageEditor
版权所有 2009-2014 荆门泽优软件有限公司 保留所有权利 官方网站:http://www.ncmem.com 产品首页:http://www.ncmem.com/webplug/image-e ...
- Linux 基础教程 44-history命令
什么是history 在Linux系统日积月累的使用中,我们会输入很多命令.而在我们想重复上一个命令时,通过使用方向键向上翻就可以查看我们已经输入和使用过的命令.那大家有没有想过这个命令保存在 ...
- 常用脚本--查看死锁和阻塞usp_who_lock
USE [master] GO /****** Object: StoredProcedure [dbo].[sp_who_lock] Script Date: 02/07/2014 11:51:24 ...
- 执行计划--WHERE条件的先后顺序对执行计划的影响
在编写SQL时,会建议将选择性高(过滤数据多)的条件放到WHERE条件的前面,这是为了让查询优化器优先考虑这些条件,减少生成最优(或相对最优)的执行计划的时间,但最终的执行计划生成过滤顺序还是决定这些 ...