DSO之光度标定
光度标定(Photometric Camera Calibration)是DSO(Direct Sparse Odometry)论文中比较特别的一部分。常规的vSLAM不太考虑光度标定的问题。比如基于特征点的vSLAM,由于特征描述一般会有光照不变性,对图像的亮度值并不敏感。而在直接法(direct method)中,由于姿态估计以图像的亮度值为出发点,亮度值的准确度会影响算法的精度和稳定性。因此,作者引入了光度标定的概念,利用精细的相机成像模型,标定成像过程中的光度参数,并用这些参数校正图像亮度值。
由于本人不是光学专业,文中难免有不准确的地方,还望大家不吝赐教。
参考文献
- Direct Sparse Odometry
- A Photometrically Calibrated Benchmark For Monocular Visual Odometry
- Recovering High Dynamic Range Radiance Maps fromPhotographs
- What is the Space of Camera Response Functions?
- Wikipedia
相机成像原理
一般而言,相机测量的是场景中的光的辐射度(radiance)。成像过程如下图[3]。

radiance用来描述物体表面单位面积上的能量分布,和方向有关。
In radiometry, radiance is the radiant flux emitted, reflected, transmitted or received by a surface, per unit solid angle per unit projected area. For example, radiance in direction of the optical axis of a LED is higher than it's radiance at an angle of 15°.
irradiance用来描述物体表面单位面积总的入射能量,和方向无关。比如,用来描述传感器像元的入射光强(来自于不同方向的环境光的累加)。
In radiometry, irradiance is the radiant flux (power) received by a surface per unit area. Irradiance commonly is used referring to power incident on a surface.
下面详细分析一下各个模块的影响。
光学(镜头和光圈)
除了大家熟悉的小孔成像模型和畸变模型,还会有晕影(vignetting)。以下摘自wiki。
光学晕影是由一个或多个透镜的实际尺寸造成的,后方的元件遮蔽了前方的,导致前端透镜离轴的有效入射光减少,结果是光的强度由图像中心向周围逐渐减弱。光学晕影对镜头的开口相当敏感,只要适当的调整光圈就可以消除,通常缩小2至3格就可以完全消除。
也就是说,假如拍摄一个亮度非常均匀的物体,图像中心和边缘的亮度值并不一致。
如果这些因素都没有影响,那么从scene radiance到sensor irradiance的转化是线性的。
快门
快门影响的是曝光时间。自动曝光模式下,不同场景曝光时间并不一样,会导致同一物体在不同场景下的灰度值产生差异。另外还想提到的是全局快门(global shutter)和卷帘快门(rolling shutter)。全局快门保证所有感光元件的曝光起始时间和间隔是一样的,卷帘快门并不能保证。因此文献中一般推荐使用全局快门。
传感器
传感器(CCD/CMOS)将每个像元接收到的光子通过一系列处理转化为亮度值。这里面涉及到光电效应、ADC、DSP等过程。输入的曝光量和输出的亮度值之间的关系称为响应函数(response function)。响应函数一般来说是非线性的,甚至包含人为调整的成分,比如伽马校正、白平衡、色调、饱和度等。为图像进行伽马编码的目的是用来对人类视觉的特性进行补偿,从而根据人类对光线或者黑白的感知,最大化地利用表示黑白的数据位或带宽。人眼对暗部比较敏感,因此一般选择提高暗部的分辨率。这些因素会非线性地修正曝光量,因此作者希望通过光度标定来补偿它们的影响。
论文解析
下面我们来看看作者在DSO中如何排除这些因素的影响。作者采用的数据集中有两个镜头,一个鱼眼一个广角。上一节提到的三个因素都有影响。
- 用函数V来表示光学模块的影响。V是光学模块的固有属性,作者用一个权重矩阵(和图像一样大)来表示其对每个像元的影响。
- 用t来表示曝光时间。相机有开启自动曝光时,每一帧的t都不相同。
- 用函数G来表示响应函数,其值域是离散的(比如0~255)。G是传感器的固有属性。
用B表示不受光学模块影响的sensor irradiance图像,I表示输出的图像,作者提出的成像模型为(参考文献1式(2))

标定响应函数
响应函数有几种常见的参数模型,比如线性、伽马和基函数。而作者用非参数估计的方法来标定。具体而言,在固定场景下,相机在不同曝光时间下,重复拍照得到一系列图像。由于场景不变,B在不同图像中是一样的,图像亮度值的差异来源于曝光时间和响应函数。因此,作者构建了一个能量误差函数,用迭代的方法求解U=G^{-1}。其中待求解变量为B和U。每步迭代中,先用估计的U求解B,然后用更新的B求解U。具体细节参见文献2第2.3.1节。
实验中,作者采集了1000幅不同曝光的图像,其中的5幅见下图。

文献2图3提供了作者标定出的gamma校正曲线。蓝色是有gamma校正的结果,绿色是没有gamma校正的结果。

标定晕影
假设响应函数G已经标定好了。作者通过大量图像数据,迭代估计V的值。具体而言,从不同角度重复拍摄一个 Lambertian surface,得到一系列图像。作者选择了白墙作为Lambertian surface。理想光照下,墙上的每个点在不同角度下的radiance是均匀的,因此B在不同图像中是一样的。作者并不要求白墙的亮度均匀,因此B中每个点的值是不一样的。场景见下图
利用响应函数的逆得到B'=V*B。作者构建了一个能量误差函数,用迭代的方法求解V。其中待求解变量为B和V。每步迭代中,先用估计的V求解B,然后用更新的B求解V。具体细节参见文献2第2.3.2节。
从不同角度拍摄时,白墙上不同位置的三维点相对于镜头的位置是不一样的,晕影的影响也不一样。因此需要将白墙变换到相机坐标系,引入了姿态估计的问题。作者用了一个AR marker来估计姿态。
文献2中,作者采集了700幅图像,其中的4幅见下图。

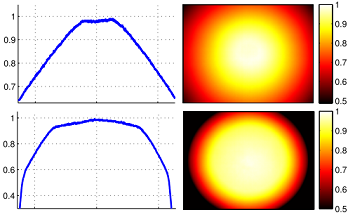
文献2图4给出了两个不同镜头模组的晕影。
有光度标定时的处理
通过标定V和G,就可以反解出B(参考文献1式(3))。使用B去做直接法当然要比I准确地多。当然,场景的亮度在不同视角下有差异,这是无法避免的。

一般情形
对于做过光度标定的相机,我们可以用上面的方法处理。对于一般的相机怎么办呢?作者在估计姿态的同时,还估计图像校正参数,用于粗略去除响应函数的影响。具体做法是加入一个affine brightness transfer function。个人理解,这个affine brightness transfer function其实是线性响应函数的逆函数。(似乎也可看做是一种归一化的方式)
这个函数可以校正曝光时间(正比于e^{-a_i})和图像亮度基底(b_i)的影响。晕影不太好建模,作者暂时没有考虑。
因此,总的姿态估计的目标函数为

这里的I指的是校正过的亮度值。当没有光度标定时,G=V=t=1,因此I就是输出图像本身。有光度标定时,I=t*B。
作者还加入正则项来平衡有无光度标定的影响。
当有光度标定时,a_i和b_i可以设为0,也可以不为0(相当于额外的校正,正则项限制了它们不会很大)。当没有光度标定时,lambda_a和lambda_b均为0,也就是说,a_i和b_i不做任何限制,均作为待求参数参与优化。另外,当lambda_a和lambda_b均为无穷时,a_i和b_i必须为0,因此不会优化图像校正的参数(即参考文献1图14中的brightness constancy)。光度标定参数的影响见参考文献1第4.2小结。

思考:一般情形下,是否可以用伽玛响应函数代替线性响应函数?只需要一个额外的参数就可以模拟非线性的情形。

小结
推荐大家有时间看一下参考文献2。想发自内心地吹一波,Engel他们的工作做得真是太细致了。
DSO之光度标定的更多相关文章
- DSO 运行 —— dso_ros + Android 手机摄像头
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12425855.html 本文要点: dso 配置安装 dso 离线 ...
- 漫谈 SLAM 技术(上)
欢迎大家前往腾讯云社区,获取更多腾讯海量技术实践干货哦~ 作者:解洪文 导语 随着最近几年机器人.无人机.无人驾驶.VR/AR的火爆,SLAM技术也为大家熟知,被认为是这些领域的关键技术之一.本文对S ...
- SLAM、三维重建,语义相关数据集大全
作者朱尊杰,公众号:计算机视觉life,编辑成员 一 主要针对自动驾驶: 1.KITTI数据集: http://www.cvlibs.net/datasets/kitti/index.php(RGB+ ...
- DSO 代码框架
从数据流的角度讲一遍 DSO 代码框架. DSO 的入口是 FullSystem::addActiveFrame,输入的影像生成 FrameHessian 和 FrameShell 的 Object, ...
- Paper Reading: Stereo DSO
开篇第一篇就写一个paper reading吧,用markdown+vim写东西切换中英文挺麻烦的,有些就偷懒都用英文写了. Stereo DSO: Large-Scale Direct Sparse ...
- DSO windowed optimization 代码 (1)
这里不想解释怎么 marginalize,什么是 First-Estimates Jacobian (FEJ).这里只看看代码,看看Hessian矩阵是怎么构造出来的. 1 优化流程 整个优化过程,也 ...
- DSO论文解读
dso 1.1. Motivation 本文提出的单目视觉测距法的直接和稀疏公式是出于以下考虑因素; (1)直接: 关键点的主要优点之一是它们能够为使用现成的商品相机拍摄的图像中存在的光度和几何失真提 ...
- DSO 优化代码中的 Schur Complement
接上一篇博客<直接法光度误差导数推导>,DSO 代码中 CoarseInitializer::trackFrame 目的是优化两帧(ref frame 和 new frame)之间的相对状 ...
- Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras 论文摘要
1. Abstract 通过一种Unified Omnidirectional Model作为投影方程. 这种方式可以使用图像的所有内容包括有强畸变的区域,而现存的视觉里程计方案只能修正或者切掉来使用 ...
随机推荐
- 【转】Django Model field reference学习总结
Django Model field reference学习总结(一) 本文档包含所有字段选项(field options)的内部细节和Django已经提供的field types. Field 选项 ...
- 如何实现一个php框架系列文章【5】安全处理输入
所有的外部输入参数都应该检查合法性. 未正确处理输入数据将可能导致sql注入等漏洞. 框架提供系列函数来取$_REQUEST中的值 requestInt requestString requestFl ...
- CSS3鼠标滑过图标放大以及旋转
本人是HTML5-CSS3初学者,这次分享一款纯CSS3实现的图片动画,当鼠标滑过小图标时,图标会放大,同时图标会出现旋转的动画效果.我们在很多个性化个人博客中经常看到鼠标滑过人物头像后头像图片旋转就 ...
- 《连载 | 物联网框架ServerSuperIO教程》- 8.单例通讯模式开发及注意事项
1.C#跨平台物联网通讯框架ServerSuperIO(SSIO)介绍 <连载 | 物联网框架ServerSuperIO教程>1.4种通讯模式机制. <连载 | 物联网框架Serve ...
- Gulp自动添加版本号
推荐使用gulp-rev + gulp-rev-collector是比较方便的方法,结果如下: "/css/style.css" => "/dist/css/sty ...
- 因为没用过,所以没想过的--goto
今天读了读 Rui Maciel 大神写的 mjson parser,mjson 解析器是一个使用 ISO C 实现的小型 JSON 解析器.嵌入式项目中使用到了该解析器,随即拿出来看看. 看到如下代 ...
- 酷欧天气(CoolWeather)应用源码
<ignore_js_op> 181420yank2y45klayhaan.jpg (35 KB, 下载次数: 0) 下载附件 保存到相册 2016-3-29 15:09 上传 酷欧 ...
- 解决adobe air sdk打包 apk后自动在包名前面加上air. (有个点)前缀的问题
早就找到了这个方法,但是一直忙没心思写博客. 默认情况下,所有 AIR Android 应用程序的包名称都带 air 前缀.若不想使用此默认行为,可将计算机环境变量 AIR_NOANDROIDFLAI ...
- 【极品代码】一般人我不告诉他,手机端h5播放时不自动全屏代码
已测适用于ios,某些安卓手机微信下播放视频会出现播放器控件(这个实在是无力吐槽噢,因为之前还遇到过微信播放完视频后竟然无法退出全屏出现广告的情况,只有播放完后刷新页面并且要放到框架页里才能屏蔽微信视 ...
- J2EE或MyEclipse简单配置以及第一个web页面
首先打开你下载安装好的MyEclipse,配置你开发需要的环境. 大致分为3步:①配置编码:Window-->preferences-->General-->Workspace--& ...