mtk相机冷启动拆解
1 概述
冷启动大致可以分成以下几块内容:
| S0 | (system) | 主要是 Activity 的创建耗时(从 Touch up,即 ptr:up 开始) |
ptr:up |
| S1 | App | 从 Activity 创建成功,到下 open camera 的时间(对应 CameraService::connect); Note:一般习惯把 S0 和 S1 算成一大阶段; |
|
| S2 | HAL | open camera 到 onOpened(即 connect 调用完成)回调上去的时间; |
|
| S3 | App | onOpened 回调后,到 App 去 creatSession 的时间; |
|
| S4 | HAL | creatSession 的耗时(对应整个endConfigure); |
|
| S5 | App | creatSession 完成到 setRepeatingRequest 的时间; |
|
| S6 | HAL | setRepeatingRequest 后到底层抛出第一帧(cameraserver 会有一个 first full buffer 的记录)的时间; |
|
| S7 | App+MultiMedia | 底层出第一帧后,到 App 真正第一次开始 draw 数据,数据送到 surfaceFlinger 显示出来(第二次 onMessageReceived 完成)的时间。 |
adb shell setprop service.adb.root 1
开发者模式关闭再打开
sched/freq/idle #这三个tag是cpu 信息,无论如何必须带上
gfx/view/input #测试列表滑动.桌面滑动.这种流畅性问题
gfx/view/imput/hwui #绘图问题
gfx/view/input/res/am/wm #测试app启动
gfx/view/input/dalvik/disk #GC或者IO导致卡顿
gfx/view/input/res/am/wm/power #亮屏,电量相关
python systrace.py gfx camera view input sched freq video disk dalvik res am wm -b 20480 -t 5 -o trace.html
S0:Touch Up → ActivityStart
S1:ActivityStart → open camera | start
S2:Open camera
S3:Open camera | end → Configure streams | start
S4:Configure streams
S5:Configure streams | end → SetRepeatingRequests
S6:SetRepeatingRequests → 1st frame out from hal
S7:1st frame out from hal → Display show 1st frame
2 S0+S1
system+app耗时
搜索关键字ptr:up
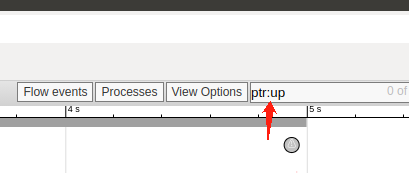
可以看到如下的内容:这是按下相机按钮并且抬起的操作
从 这里开始计时到connectDevice结束是S0+S1的时间.
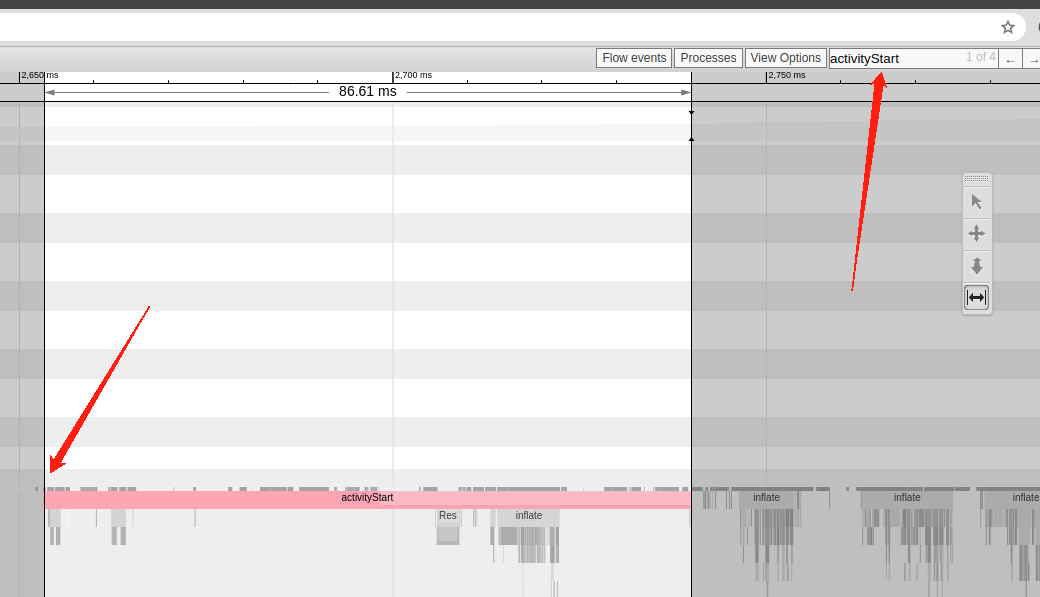
S1的主要时间是activityStart到connectDevice
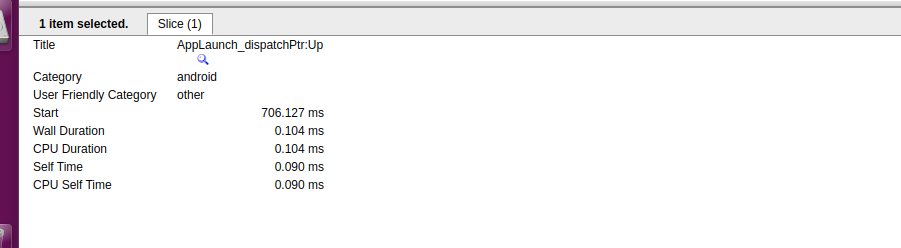
S0: AppLaunch_dispatchPtr:Up --> activityStart
S1: activityStart --> connectDevice
3 S2
hal耗时
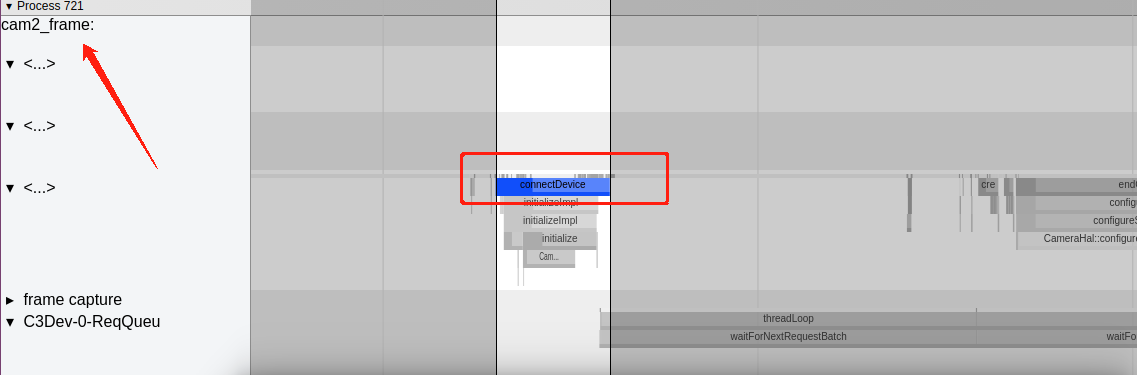
搜索connectDevice
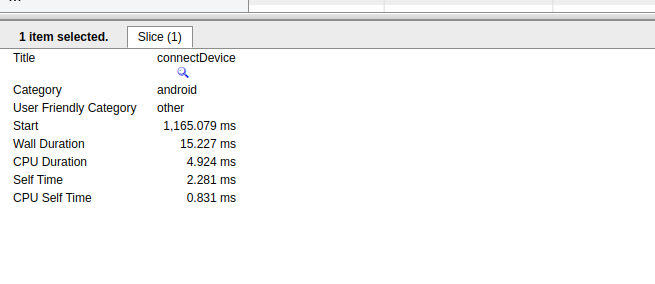
可以看到 connectDevice的持续时间.这就是S2的耗时
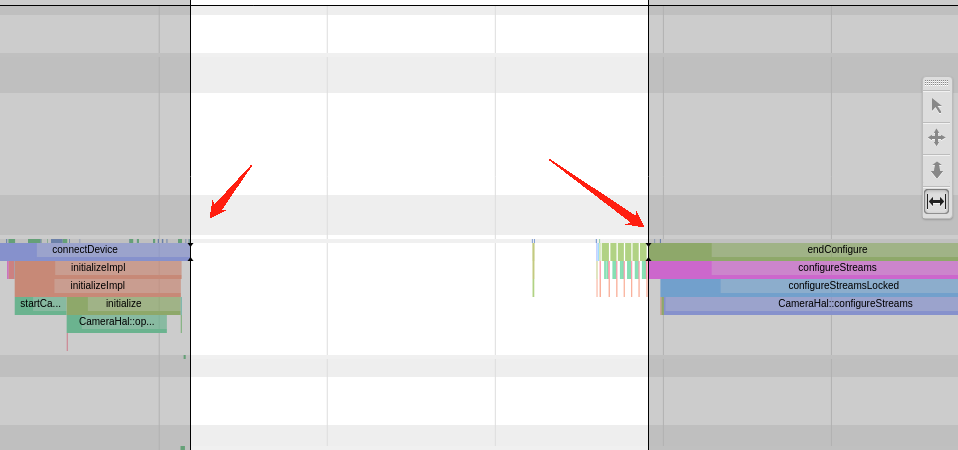
4 S3
app耗时
从下图可以看到是从connectDevice的结尾到 endConfigure的开始
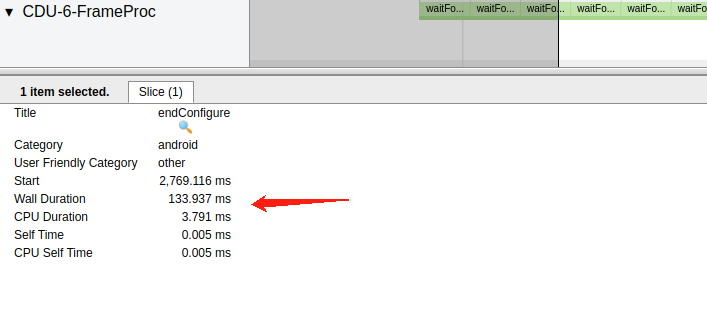
5 S4
hal 耗时
endConfigure的持续时间
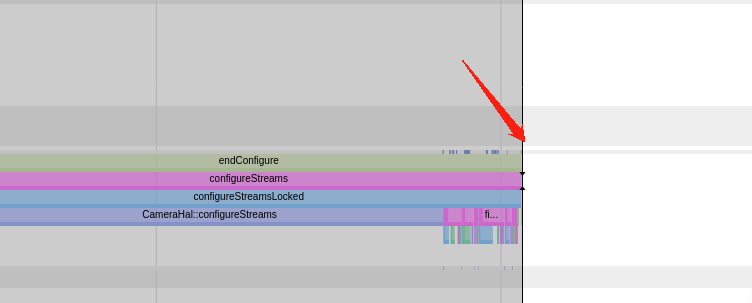
6 S5
app耗时
从endConfigure的结尾到setRepeatingRequest返回完成
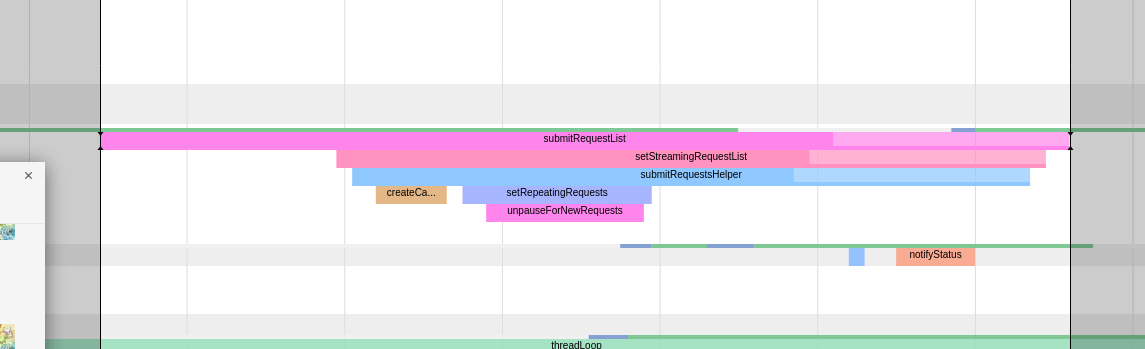
7 S6
hal耗时
直接搜索first full buffer .有的apk会返回多个.一般都是以最后一个收尾为主.
这个一般都是和captureRequest返回在一起的.
耗时是从setRepeatingRequest 计算到first full buffer返回
8 S7
app和多媒体耗时,有待研究
mtk相机冷启动拆解的更多相关文章
- 关于android MTK相机L版本,切换屏幕比例后,分辨率随之改变,但重新进入相机后原有分辨率不再生效问题
BUG详细:比如4:3的时候是200W,切成全屏变400W,重新切回4:3为300W,退出相机后,重新进入又变成200W. 原因分析:这个版本的设计如此,当你点选屏幕比例的时候,程序设计是把这个比例值 ...
- MTK Android 默认值修改笔记
1.设置菜单: 1.1位置信息(Location)默认关闭: 请将 alps\frameworks\base\packages\SettingsProvider\res\values\default. ...
- 论山寨手机与Android联姻 【6】MTK手机的基带芯片
MTK的硬件技术的核心,在于它的基带芯片.为了降低成本,同时缩减手机主板的面积,基带芯片中除了CPU以外,还集成了很多外设控制器.Feature Phone的功能,基本上取决于基带芯片所支持的外设功能 ...
- 论山寨手机与Android联姻 【5】MTK颠覆手机产业链
MTK一站式解决方案(Turn-Key)模式出现以前,手机设计开发流程大约可以分成以下6步. 第1步,Design House从芯片厂商那里拿到参考设计. 芯片厂商根据自己的市场部门对手机市场的预测, ...
- MTK Camera相关的Makefile Option详解
列举了所有Camera相关的MakefileOption,并对其功能含义和OptionValues做了详细的解释.[KEYWORD]Others[SOLUTION]YUVCAM_INTERPOLATI ...
- MTK Camera驱动移植
对于MTK Camera驱动移植一般分为四部分: 1.硬件IO口配置: 2.Camera驱动移植: 3.上电时序. 4.改动i2c控制器: 硬件电路: 1.GPIO配置 打开 mediatek\dct ...
- Android9.0 MTK 平板横屏方案修改(强制app横屏 + 开机logo/动画+关机充电横屏 + RecoveryUI 横屏)
文章较长建议先收藏再看 拆解步骤 1.app 强制横屏显示,无视 android:screenOrientation="portrait" 属性 2.屏幕触摸坐标修改为横屏 3.开 ...
- 【VS开发】【图像处理】相机中白平衡的算法模拟实现
相机主要技术点为3A算法. 而3A算法主要指的是自动对焦(AF).自动曝光(AE)及自动白平衡(AWB).自动白平衡:根据光源条件调整图片颜色的保真程度. 网上时常有类似招聘如下的招聘信息: ---- ...
- 【硬核摄影2.0】用线性CCD器件制作扫描相机
本文参考资料:[1] (Strongly Recommend!) Fundamentals and Experiments of Line Scan Camera: http://www.elm-ch ...
随机推荐
- Scala类型参数(泛型)与隐式转换
package com.yz9 import org.junit.Test import scala.collection.mutable.ListBuffer class test { @Test ...
- Educational Codeforces Round 85 (Rated for Div. 2)
\(Educational\ Codeforces\ Round\ 85\ (Rated\ for\ Div.2)\) \(A. Level Statistics\) 每天都可能会有人玩游戏,同时一部 ...
- 【noi 2.6_747】Divisibility(DP)
这题题意与前面的"判断整除"重复了.具体解释可看我这篇的博文. http://www.cnblogs.com/konjak/p/5936738.html 1 #include< ...
- python的threading的使用(join方法,多线程,锁threading.Lock和threading.Condition
一.开启多线程方法一 import threading,time def write1(): for i in range(1,5): print('1') time.sleep(1) def wri ...
- B-number HDU - 3652
题意: 找出区间[li,ri]有多少个符合要求的数: 1.这个数里面有13 2.这个数可以被13整除 题解: 这个题目和之前的有点不一样就是这个题目要我们求包含13的(之前做过的都是不包含).但是都差 ...
- 牛客编程巅峰赛S1第6场 - 黄金&钻石&王者 B.牛牛摆放花 (贪心)
题意;将一组数重新排序,使得相邻两个数之间的最大差值最小. 题解:贪心,现将所有数sort一下,然后正向遍历,将数分配到新数组的两端,然后再遍历一次维护一个最大值即可. 代码: class Solut ...
- Codeforces Round #654 (Div. 2) D. Grid-00100 (构造)
题意:构造一个\(n\)x\(n\)只含\(0\)和\(k\)个\(1\)的矩阵,统计每一行每一列\(1\)的sum,然后构造一个权值最大行和最小行的差的平方加权值最大列和最小列的差的平方的最小和(\ ...
- 13. 从0学ARM-Cortex-A9 RTC裸机程序编写
一.RTC RTC(Real-Time Clock) 实时时钟. RTC是集成电路,通常称为时钟芯片.在一个嵌入式系统中,通常采用RTC来提供可靠的系统时间,包括时分秒和年月日等,而且要求在系统处于关 ...
- Hyper-V安装CentOS修改分辨率
grubby --update-kernel=ALL --args="video=hyperv_fb:1600x900" reboot https://blog.csdn.net/ ...
- 如何加入VNT Hubble主网
环境:Ubuntu20.04 (但以下方法应该只要不是过于老旧的Ubuntu,都行得通) 从源码安装go-vnt 安装Go编译器(版本大于1.9)和C编译器 安装C编译器GCC[1] sudo apt ...