【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖。
如何添加依赖?
打开程序包中的package.xml文件,添加以下内容:
<build_depend>xacro</build_depend>
<build_export_depend>xacro</build_export_depend>
<exec_depend>xacro</exec_depend>
在launch文件夹中添加 display_mwRobot_base_urdf.launch 文件
<!-- 利用urdf建立模型 -->
<launch>
<param name="robot_description" textfile="$(find mwRobot_description)/urdf/mwRobot_base.urdf" /> <!-- 显示关节控制插件,可以使关节回到中心位置也能设置关节为随机角度 -->
<param name="use_gui" value="true" /> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_mwRobot" pkg="joint_state_publisher" type="joint_state_publisher" /> <!-- 运行robot_state_publisher节点,将机器人各个links、joints之间的关系通过tf发布 -->
<node name="mwRobot_state_publisher_mwRobot" pkg="robot_state_publisher" type="state_publisher" /> <!-- 运行rviz可视化界面 -->
<node name="mwRobot_rviz" pkg="rviz" type="rviz" args="-d $(find mwRobot_description)/config/mwRobot_urdf.rviz" required="true"/> </launch>
这个launch文件的功能就是加载urdf模型文件,然后运行 joint_state_publisher 和 robot_state_publisher 这两个节点,它们是用来发布关节的状态信息和机器人各个links与joints之间的关系。所以这两个是必须要有的。最后一个就所运行rviz可视化工具来看我们机器人的模型。
由上述文件可得,我们目前还缺少 urdf/mwRobot_base.urdf 和 config/mwRobot_urdf.rviz文件。
创建urdf/mwRobot_base.urdf文件
在urdf文件夹中创建一个mwRobot_base.urdf文件。并输入以下内容:(在此文件中不能有中文注释,否则报错)
<?xml version="1.0" ?>
<robot name="mwRobot"> <!-- No Chinese annotations exist. --> <!-- Robot main body -->
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.2"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1" />
</material> </visual>
</link> <!-- The connection between the left wheel and the main body -->
<joint name ="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0" />
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint> <!-- The definition of the left wheel -->
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder length="0.06" radius="0.08"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9" />
</material>
</visual>
</link> <!-- The connection between the right wheel and the main body -->
<joint name ="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0" />
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint> <!-- The definition of the right wheel -->
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder length="0.06" radius="0.08"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9" />
</material>
</visual>
</link> <!-- Joint of front universal wheel and main body -->
<joint name ="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0" />
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint> <!-- Definition of front universal wheel -->
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0 0 0 0.9" />
</material>
</visual>
</link> <!-- Joint of back universal wheel and main body -->
<joint name ="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0" />
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint> <!-- Definition of back universal wheel -->
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0 0 0 0.9" />
</material>
</visual>
</link> </robot>
此文件中定义了机器人的主体、两个主动轮、两个从动论轮以及它们与主体的关节(连接)。
创建config/mwRobot_urdf.rviz 文件
此文件为rviz的配置文件,可以在rviz软件中随意修改,要求并不苛刻。所有参数的修改都可以通过RVIZ来完成。
首先,启动rviz。启动rviz之前需要启动roscore。所以打开两个控制终端,先在一个中启动roscore,然后在另一个启动rosrun rviz rviz。
roscore
rosrun rviz rviz
执行之后会打开一个软件,然后在左上角的files中点击Save Config As,然后保存到 config/mwRobot_urdf.rviz 即可。
图:rviz软件启动界面
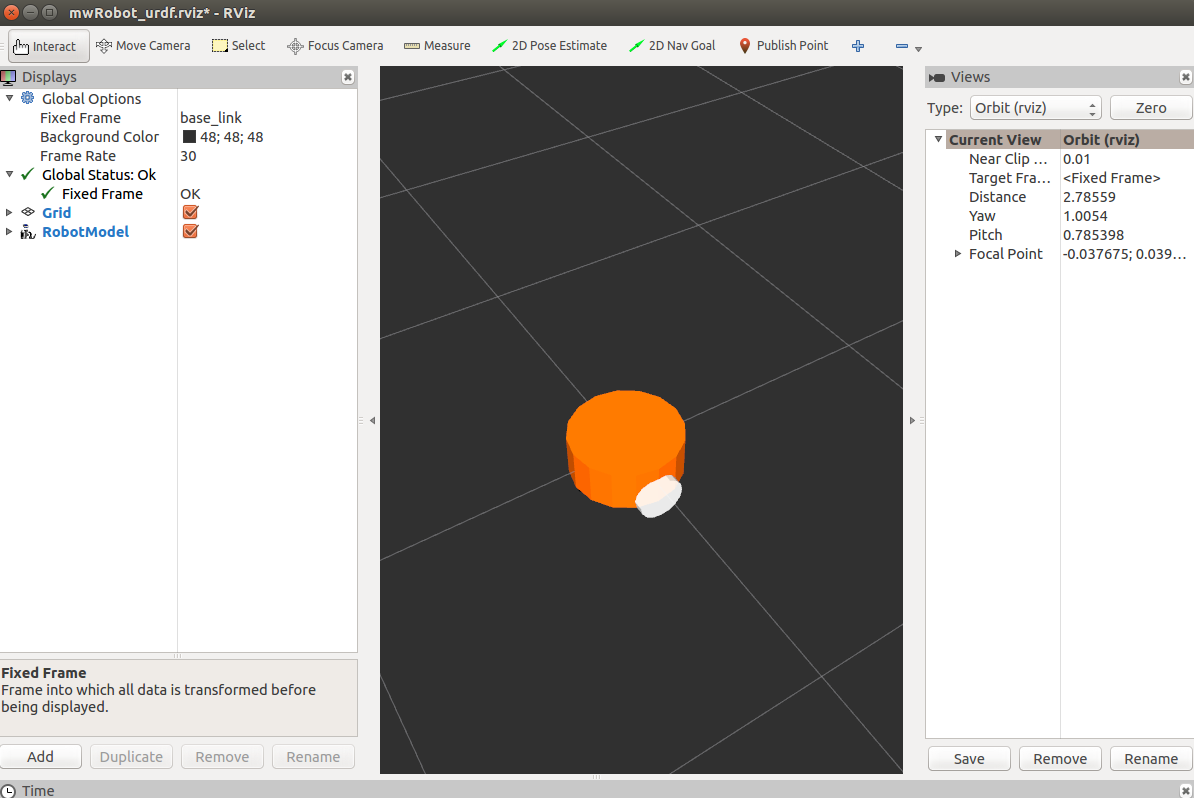
查看我们创建的模型
我们把打开的软件关闭,关闭roscore。然后执行roslaunch 包名 launch文件名。
roslaunch mwRobot_description display_mwRobot_base_urdf.launch
然后程序会自动创建roscore(如果已经存在则不创建),并打开rviz。
但是打开的RVIZ中并没有任何物体,这是因为我们还没有添加显示模型这个组件。
打开的RVIZ和创建RVIZ配置文件时的是一模一样。
这里我们先在左边Displays一栏的Global Options中,讲Fixed Frame修改为 base_link。
然后添加显示模型组件,在程序左下角有 Add Duplicate Remove Rename几个按钮,点击Add ,找到RobotModel选中并点击确定。这个时候就可以看到我们创建的模型了。
再点击Add 选择TF并添加。就可以看到模型中有5个TF坐标显示。我们可以在另一个窗口Joint State Publisher 中来控制轮子的角度。
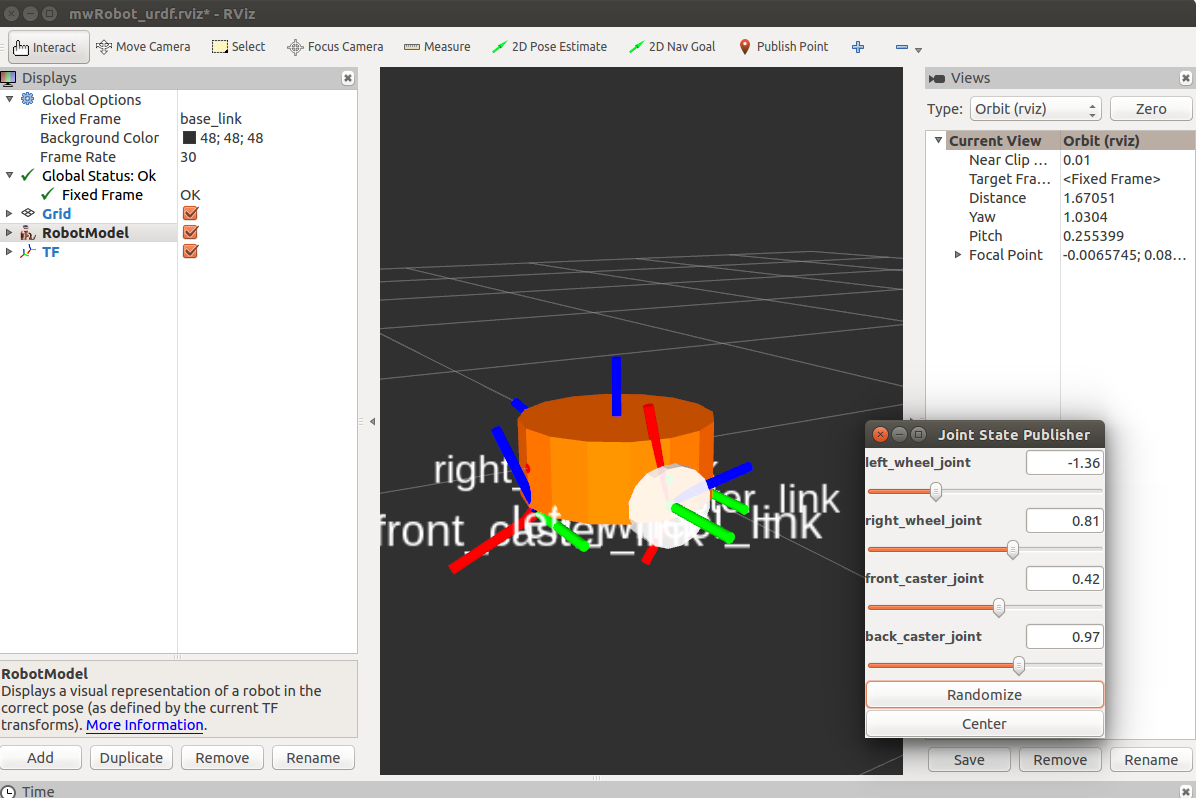
至此,我们已经可以看到我们的模型了。我们可以将RVIZ此时配置保存起来,那么在下次打开的时候就和我们现在看到的一样,不用在手动去添加tf、robotmodel了。在rviz中按Ctrl+S即可完成保存。
改进URDF模型,使用xacro模型文件
在urdf文件中,我们发现有大量的代码重复,且参数修改麻烦,不便于二次开发,没有参数计算等功能。那么我们换成以一种形式 xacro。
在使用xacro模型文件中,我们可以使用xacro模型解析器,也可以生成udrf文件来使用。
我们先创建一个xacro文件 mwRobot_Mainpart.xacro文件。此文件将会包含机器人主体部分,不包含传感器等。
以下是mwRobot_Mainpart.xacro的内容:
<?xml version="1.0" ?>
<robot name="mwRobot" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!-- No Chinese annotations exist. --> <!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/> <xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/> <xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/> <!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material> <xacro:macro name="wheel" params="prefix reflect">
<!-- The connection between the wheel and the main body -->
<joint name ="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint> <!-- The definition of the wheel -->
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder length="${wheel_radius}" radius="${wheel_length}"/>
</geometry>
<material name="gray"/>
</visual>
</link>
</xacro:macro> <xacro:macro name="caster" params="prefix reflect">
<!-- Joint of universal wheel and main body -->
<joint name ="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2+caster_radius)}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint> <!-- Definition of universal wheel -->
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<sphere radius="${caster_radius}"/>
</geometry>
<material name="black"/>
</visual>
</link>
</xacro:macro> <!-- Robot main body -->
<xacro:macro name="mwRobot_MainPart"> <!-- The joints between robots and his shadow -->
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint> <!-- Projection of robot body on the ground -->
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link> <link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow"/>
</visual>
</link> <wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/> <caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/> </xacro:macro> </robot>
上面文件中,定义了机器人的地盘结构,但是我们的机器人也有可能添加双目相机、激光雷达等传感器,这些传感器大多分开写成一个xacro文件,所以我们还需要一个文件把一个机器人的各个模块组合起来。这里我新建一个 mwRobot_CompleteModel.xacro文件来处理这个事儿。
mwRobot_CompleteModel.xacro文件内容如下:
<?xml version="1.0"?>
<robot name="wmRobot" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find mwRobot_description)/urdf/mwRobot_Mainpart.xacro" /> <mwRobot_MainPart/> </robot>
下面,我们就要修改launch文件来启动加载我们的模型文件了。这里我用的是xacro模型解析器。
复制原来的launch文件,并重命名为 display_mwRobot_CompleteModel.launch ,然后修改其中的代码:
<!-- 利用urdf建立模型 -->
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mwRobot_description)/urdf/mwRobot_CompleteModel.xacro'"/>
<param name="robot_description" command="$(arg model)" /> <!-- 显示关节控制插件,可以使关节回到中心位置也能设置关节为随机角度 -->
<param name="use_gui" value="true" /> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_mwRobot" pkg="joint_state_publisher" type="joint_state_publisher" /> <!-- 运行robot_state_publisher节点,将机器人各个links、joints之间的关系通过tf发布 -->
<node name="mwRobot_state_publisher_mwRobot" pkg="robot_state_publisher" type="state_publisher" /> <!-- 运行rviz可视化界面 -->
<node name="mwRobot_rviz" pkg="rviz" type="rviz" args="-d $(find mwRobot_description)/config/mwRobot_urdf.rviz" required="true"/> </launch>
保存,然后启动程序。
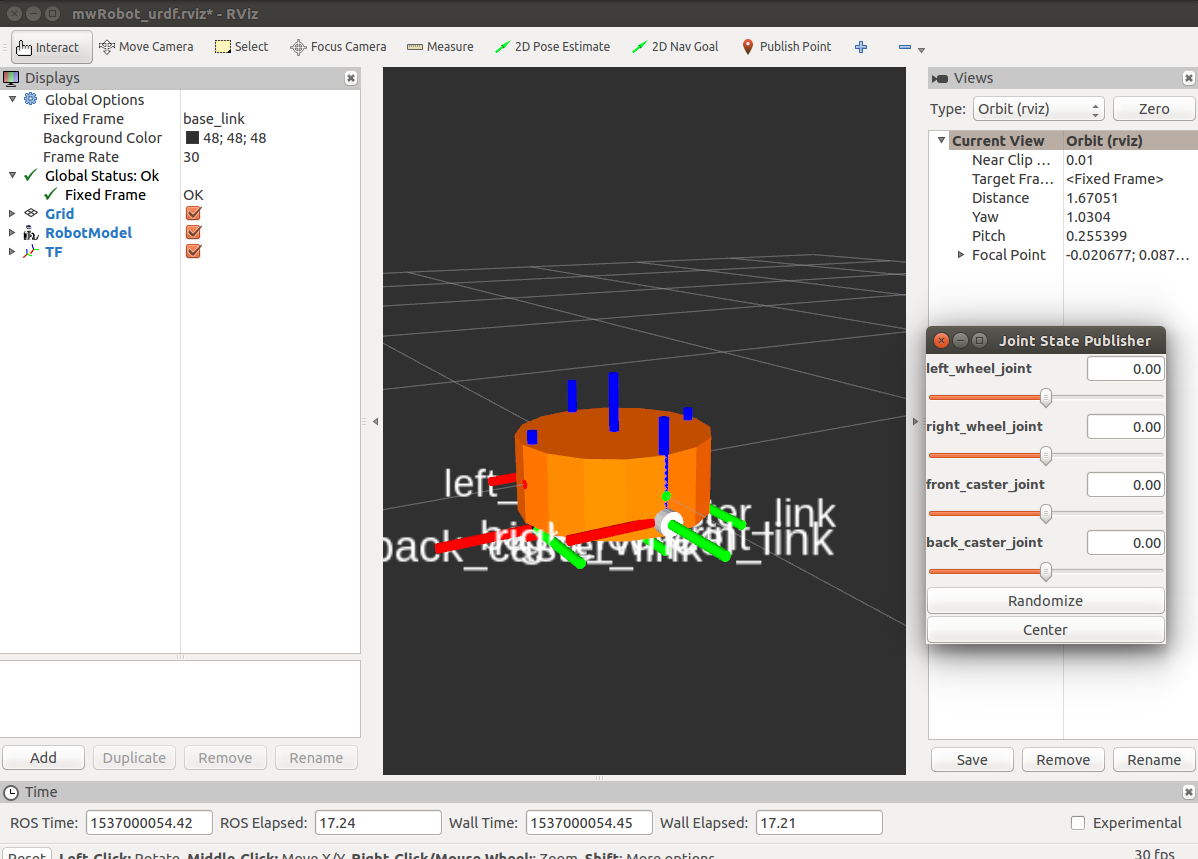
roslaunch mwRobot_description display_mwRobot_CompleteModel.launch
rviz启动后应该就可以看到模型了,和我们之前用urdf创建的是一样的。(有些误差,因为修改了两个轮子的参数)
如果不能看到模型先看看左侧的RVIZ设置是不是正确的。
下面是我打开的界面:
这样,我们的一个机器人模型就创建好了,大家可以自行修改参数来设计一个自己喜欢的机器人。
本节工程已经上传,代号为V3.
【探索之路】机器人篇(3)-给mwRobot建立模型的更多相关文章
- entity framework 新手入门篇(1)-建立模型
entity framework是微软官方免费提供给大家的一套ORM(Object Relational Mapping对象关系映射)解决方案.它不仅可以帮助我们解决数据缓存的问题,还能在最小的开销下 ...
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 《【面试突击】— Redis篇》-- Redis的线程模型了解吗?为啥单线程效率还这么高?
能坚持别人不能坚持的,才能拥有别人未曾拥有的.关注编程大道公众号,让我们一同坚持心中所想,一起成长!! <[面试突击]— Redis篇>-- Redis的线程模型了解吗?为啥单线程效率还这 ...
- 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernetes)-kubernetes/dashboard
本章介绍所需环境:ubuntu18.04,建立在上一篇微服务探索之路01篇已经安装了docker的基础上. 1 替换k8s镜像源为国内镜像 进入目录 cd /etc/apt/sources.list. ...
- 揭秘Keras推荐系统如何建立模型、获取用户爱好
你是否有过这样的经历?当你在亚马逊商城浏览一些书籍,或者购买过一些书籍后,你的偏好就会被系统学到,系统会基于一些假设为你推荐相关书目.为什么系统会知道,在这背后又藏着哪些秘密呢? 荐系统可以从百万甚至 ...
- django模型:为已存在的表建立模型
为已经存在的表建立模型:参考https://blog.csdn.net/opera95/article/details/78200024 为已经存在的表建立模型1.python manage.py i ...
- 2016级算法第一次练习赛-F.AlvinZH的儿时梦想——机器人篇
864 AlvinZH的儿时梦想----机器人篇 题目链接:https://buaacoding.cn/problem/868/index 思路 中等题. 判断无限玩耍: \(p\) 的值能够承担的起 ...
- pytorch 建立模型的几种方法
利用pytorch来构建网络模型,常用的有如下三种方式 前向传播网络具有如下结构: 卷积层-->Relu层-->池化层-->全连接层-->Relu层 对各Conv2d和Line ...
- 中文代码之Django官方入门:建立模型
参考编写你的第一个 Django 应用,第 2 部分 创建项目后,首先用中文命名应用: $ python3 manage.py startapp 投票 之后在models.py建立模型,其他各种相关配 ...
随机推荐
- 「刷题笔记」Tarjan
贴一个讲得非常详细的\(tarjan\)入门教程 信息传递 讲个笑话:我之前用并查集求最小环过的这题,然后看见题目上有个\(tarjan\)标签 留下了深刻的印象:\(tarjan\)就是并查集求最小 ...
- java43
自定义日期格式 import java.text.DateFormat; import java.text.ParseException; import java.util.Date; public ...
- go语言之---数组(array)和切片(slice)
一.数组 1.什么是数组? 1.数组是一系列同一类型数据的集合 2.数组中包含的每个数据被称为数组元素 3.一个数组中包含的元素个数成为数组长度 4.数组的长度是固定的 5.一个数组可以由零个或者多个 ...
- PyQt(Python+Qt)学习随笔:formLayout的layoutRowWrapPolicy属性
Qt Designer的表单布局(formLayout)中,layoutRowWrapPolicy用于控制表单布局中表单行的标签和输入部件之间是否换行.如图: 上图中蓝色标记圈起来的下拉列表数据是其可 ...
- OA公文流转系统(未完成)
基本页面比较多,所以就不贴出来了,具体的页面可以自行浏览. 点我进入OA系统浏览界面(未做响应式布局,需电脑端打开) 账号密码: 部门:bumen------bumen 办公室:bangongshi- ...
- Google浏览器PostMan插件版安装步骤
PostMan插件版安装步骤: 第一步:把下载后的.crx扩展名的离线Chrome插件的文件扩展名改成.zip或者.rar 第二步:右键点击该文件,并使用压缩软件(如winrar.360压缩等)对该压 ...
- Fiddle抓包应用概述
抓包: 抓包(packet capture)就是将网络传输发送与接收的数据包进行截获.重发.编辑.转存等操作,也用来检查网络安全.抓包也经常被用来进行数据截取等.说简单点就是抓取前端发送给服务器的数据 ...
- filebeat输出结果到elasticsearch的多个索引
基本环境: filebeat版本:6.5.4 (Linux,x86-64) elasticsearch版本:6.54 (一)需求说明 在一台服务器上有多个日志需要使用filebeat日志收集到el ...
- sql server的bcp指令
有时需要允许bcp指令 -- 允许配置高级选项EXEC sp_configure 'show advanced options', 1GO-- 重新配置RECONFIGUREGO-- 启用xp_cmd ...
- Android开发系列全套课程
学习地址 https://pan.baidu.com/s/12Ljy-TDL5-P0AsYdTxGw5w#list/path=%2F