Turtlebot3新手教程:Open-Manipulator机械臂
*本文针对如何结合turtlebot3和Open-Manipulator机械臂做出讲解
测试在Ubuntu 16.04, Linux Mint 18.1和ROS Kinetic Kame下进行
具体步骤如下:
安装依赖包
sudo apt-get install ros-kinetic-moveit* ros-kinetic-dynamixel-sdk ros-kinetic-dynamixel-workbench-toolbox ros-kinetic-robotis-math ros-kinetic-industrial-core
安装open_manipulator
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/open_manipulator.git
cd ~/catkin_ws && catkin_make
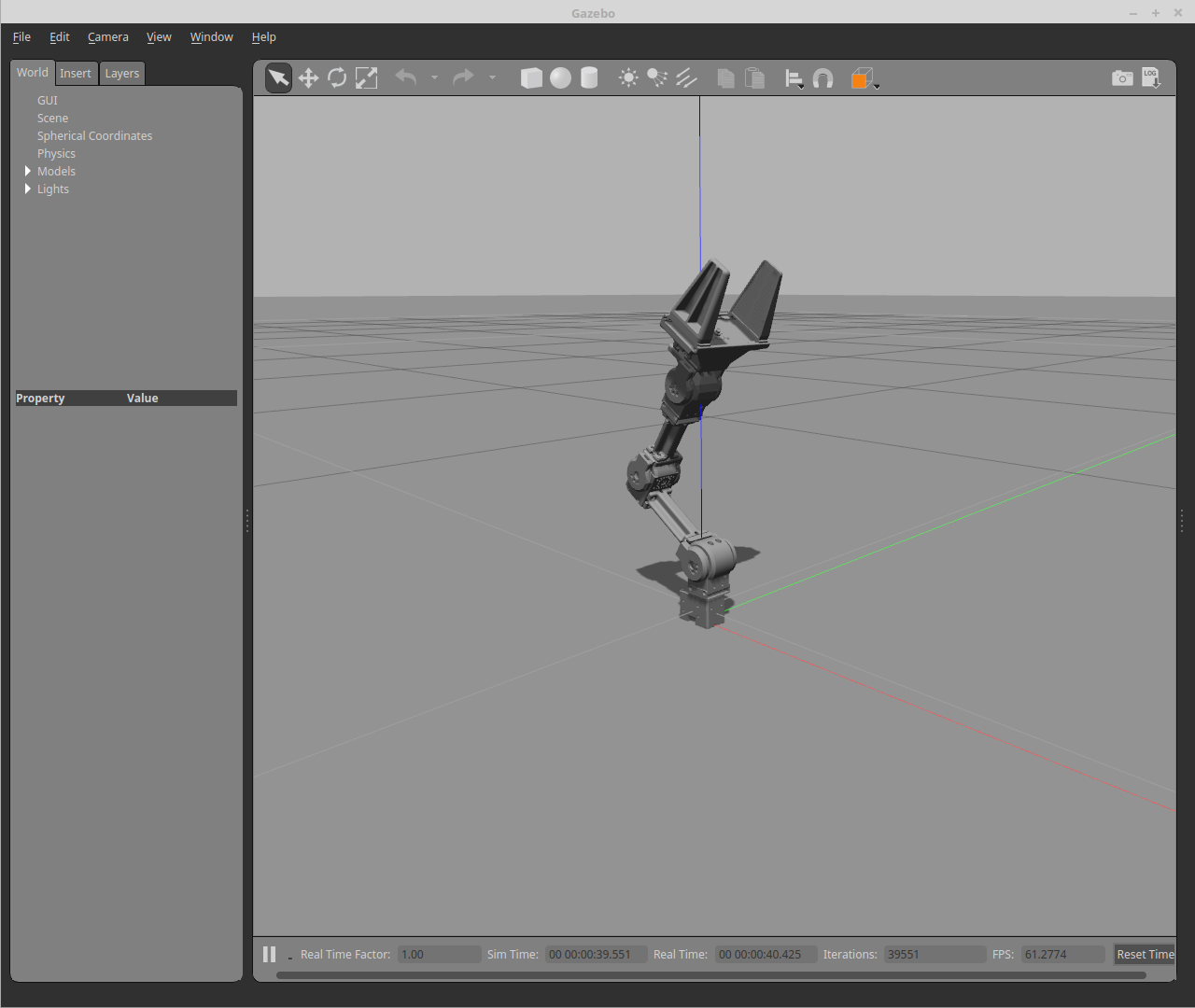
在Gazebo环境中启动Open-Manipulator
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch

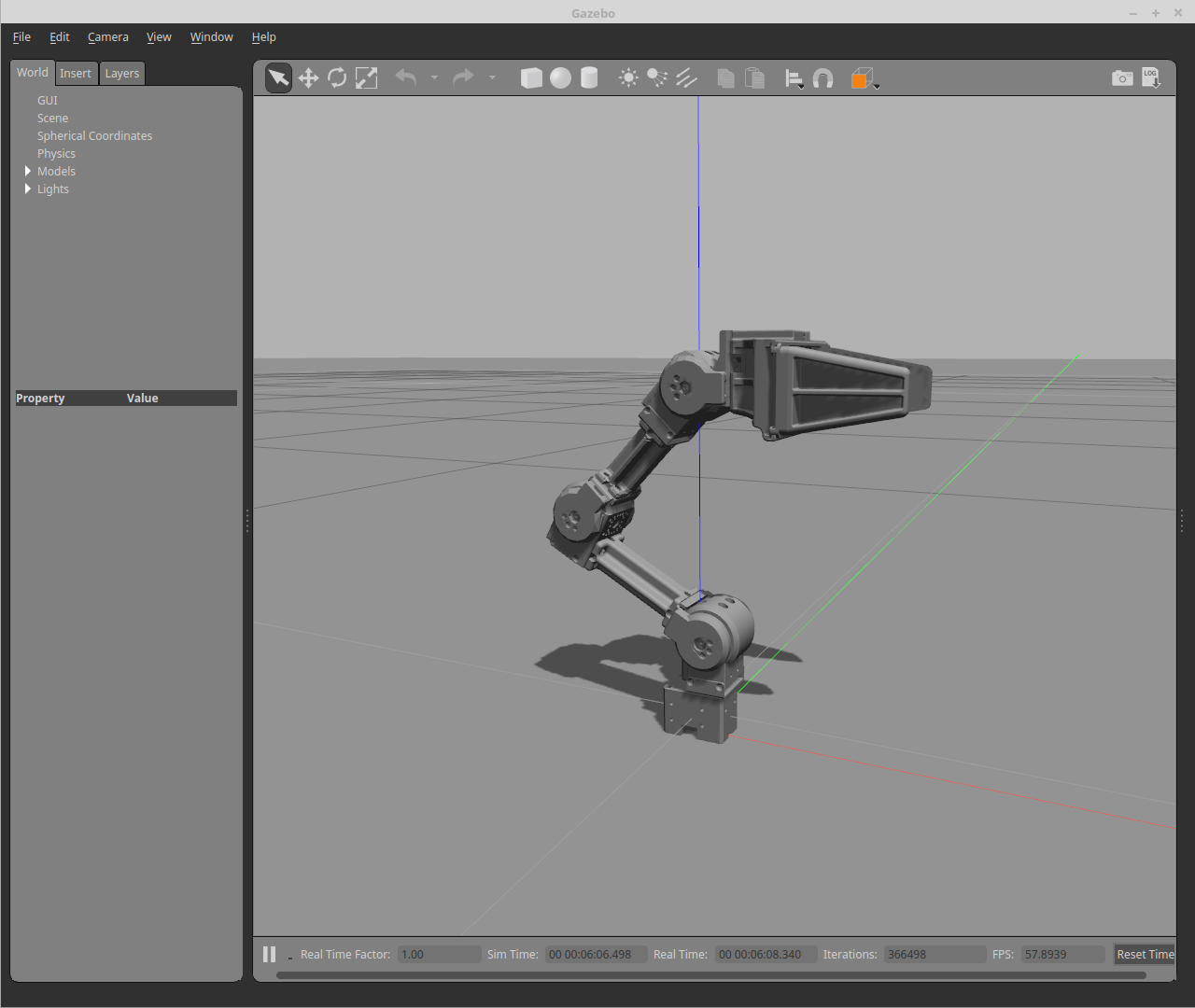
发布话题控制open_manipulator
rostopic pub /open_manipulator_chain/joint2_position/command std_msgs/Float64 "data: 1.0" --once
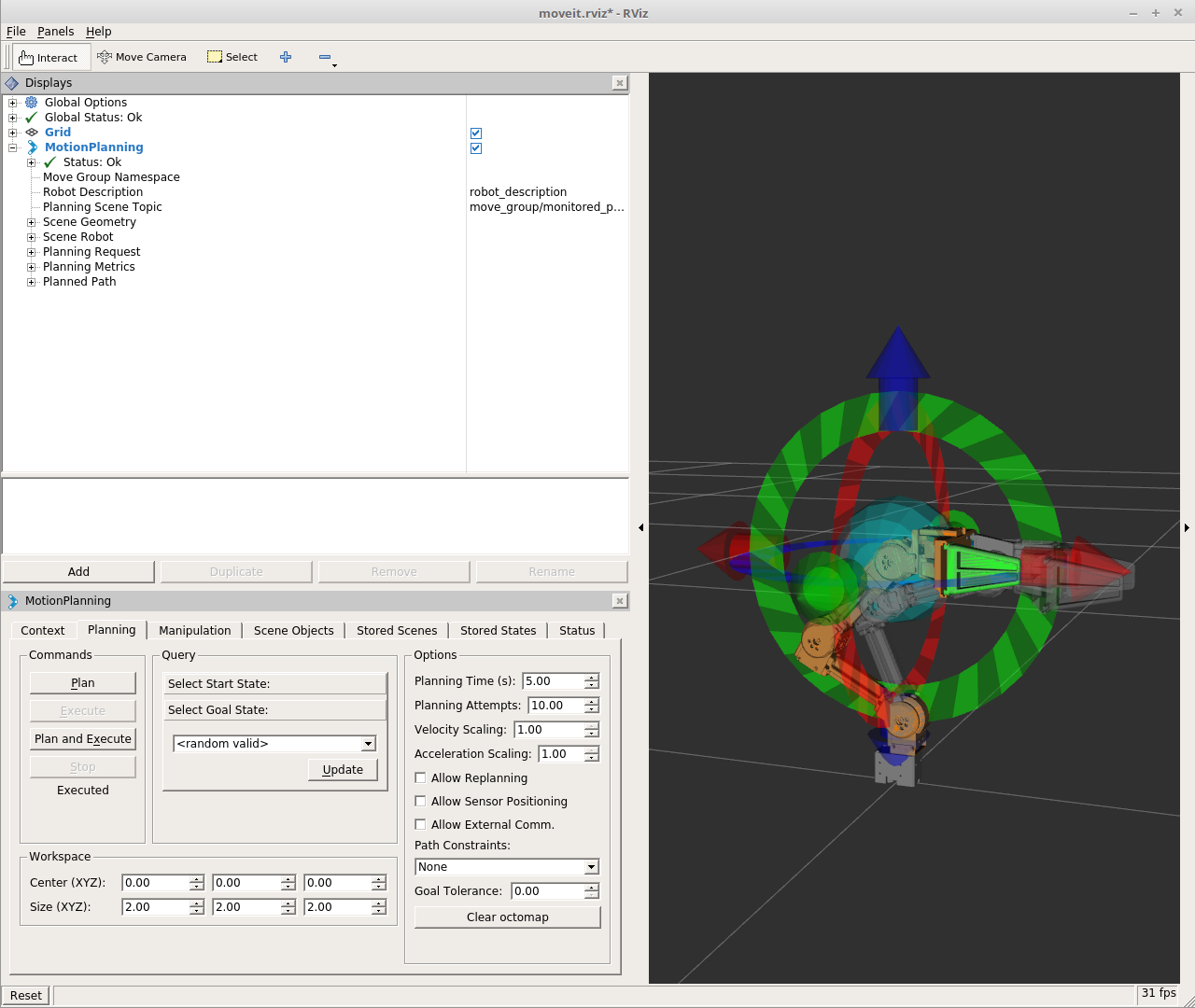
新终端打开,在moveit中使用open_manipulator
roslaunch open_manipulator_moveit open_manipulator_demo.launch use_gazebo:=true
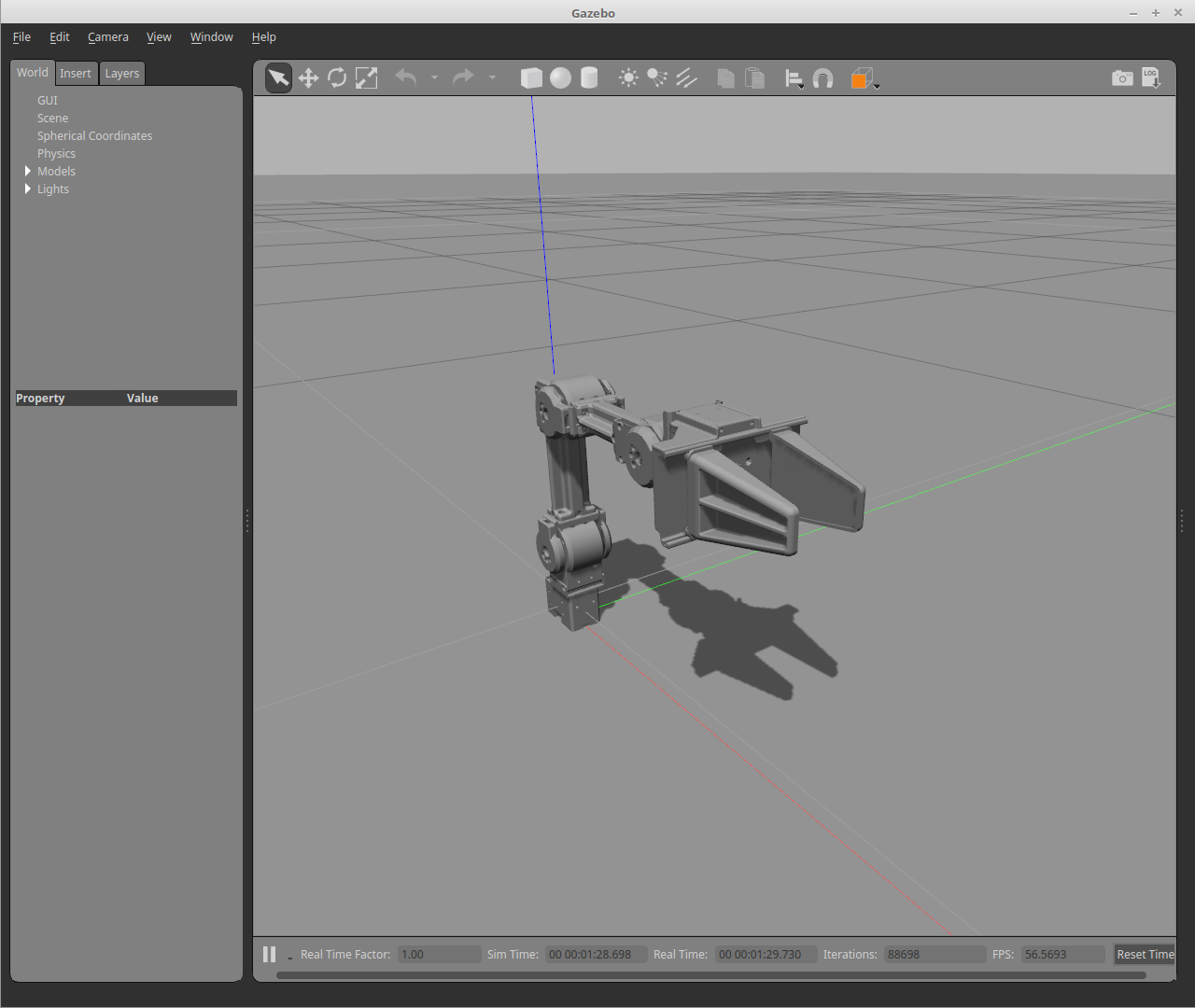
发布话题控制机械爪
rostopic pub /robotis/open_manipulator/gripper std_msgs/String "data: 'grip_on'" --once
机械臂平台:
启动dynamixel系列的Open-Manipulator
roslaunch open_manipulator_dynamixel_ctrl dynamixel_controller.launch
利用moveit控制
roslaunch open_manipulator_moveit open_manipulator_demo.launch
Turtlebot3-waffle结合Open-Manipulator
安装依赖:
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/catkin_ws && catkin_make
启动rviz并显示模型
roslaunch open_manipulator_with_tb3 open_manipulator_chain_with_tb3_rviz.launch

Turtlebot3新手教程:Open-Manipulator机械臂的更多相关文章
- Turtlebot3新手教程-应用-跟随
本文针对如何利用Turtlebot3可实现的各种应用进行讲解 具体步骤如下: [Remote PC]安装应用包 cd ~/catkin_ws/src git clone https://github. ...
- Turtlebot3新手教程:仿真
本文章针对如何利用turtlebot3实现仿真功能进行讲解 测试环境:Ubuntu 16.04 和 ROS Kinetic Kame. 注意:TurtleBot3 Simulation 依赖 turt ...
- Turtlebot3新手教程:OpenCR软件设置(shell)
*本文针对如何利用脚本来更新固件进行讲解 具体步骤如下: burger的固件更新 $ export OPENCR_PORT=/dev/ttyACM0 $ export OPENCR_MODEL=bur ...
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- ROS探索总结(三)——ROS新手教程【转】
转自:http://blog.csdn.net/hcx25909/article/details/8811313 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 一ROS的 ...
- 机械臂运动学逆解(Analytical solution)
计算机器人运动学逆解首先要考虑可解性(solvability),即考虑无解.多解等情况.在机器人工作空间外的目标点显然是无解的.对于多解的情况从下面的例子可以看出平面二杆机械臂(两个关节可以360°旋 ...
- ROS探索总结(三)——ROS新手教程
转自古-月 http://blog.csdn.net/hcx25909 前面我们介绍了ROS的特点和结构,接下来就要开始准备动手感受一下ROS的强大了. ROS官网的wiki上针对新手的教程很详细,最 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介
随机推荐
- 第四十一章、PyQt显示部件:TextBrowser、CalendarWidget、LCDNumber、ProgressBar、Label、HorizontalLine和VerticalLine简介
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.概述 在Designer中,显示部件有Labe ...
- Monkey 部署环境
Monkey的介绍 它是Android系统自带一个命令行工具,可以运行在模拟器里或者真是设备中运行. Monkey是发送伪随机用户事件的工具. Monkey向系统发送伪随机的用户事件流,实现对正在开发 ...
- CSS全览_选择符+特指+单位+字体
CSS全览_选择符+特指+单位+字体 目录 CSS全览_选择符+特指+单位+字体 1. CSS样式 2. 选择符 3. 特指度和层叠 4. 值和单位 5. 字体 作者: https://www.cnb ...
- CF1147F Zigzag Game & 稳定婚姻问题学习笔记
CF1147F Zigzag Game 这题太神仙了,不得不记录一下. 我网络流做不动了,DS做不动了,DP做不动了,特别自闭.于是博弈论之神(就是随手切3500博弈的那种) \(\color{bla ...
- 深入理解Java虚拟机(十)——线程安全与锁优化
什么是线程安全 当多个线程同时访问一个对象的时候,不需要考虑什么额外的操作就能获取正确的值,就是线程安全的. 线程安全的程度 1.不可变 不可变的对象一定是线程安全的,因为值始终只有一个. final ...
- springboot中使用h2数据库(内存模式)
使用H2的优点,不需要装有服务端和客户端,在项目中包含一个jar即可,加上初始化的SQL就可以使用数据库了 在springboot中引入,我的版本是2.1.4,里面就包含有h2的版本控制 <!- ...
- ELK-Kibana汉化
https://github.com/anbai-inc/Kibana_Hanization 补丁包 教程:1:首先,我们先杀死了Kibana进程,其实,教程说不用重启或关闭Kibana,但是,我们 ...
- 应用案例——高并发 WEB 服务器队列的应用
在高并发 HTTP 反向代理服务器 Nginx 中,存在着一个跟性能息息相关的模块 - 文件缓存. 经常访问到的文件会被 nginx 从磁盘缓存到内存,这样可以极大的提高 Nginx 的并发能力,不过 ...
- Linux 设置日期时间
linux 日期设置 直接设置日期和时间 date -s 2019-02-11 date -s 12:12:12 date -s "2019-02-11 12:12:12"
- Laravel笔记记录
1.获取当前控制器和action名称 request()->route()->getAction()