深度强化学习:Deep Q-Learning
在前两篇文章强化学习基础:基本概念和动态规划和强化学习基础:蒙特卡罗和时序差分中介绍的强化学习的三种经典方法(动态规划、蒙特卡罗以及时序差分)适用于有限的状态集合$\mathcal{S}$,以时序差分中的Q-Learning算法为例,一般来说使用n行(n = number of states)和m列(m= number of actions)的矩阵(Q table)来储存action-value function的值,如下图所示:
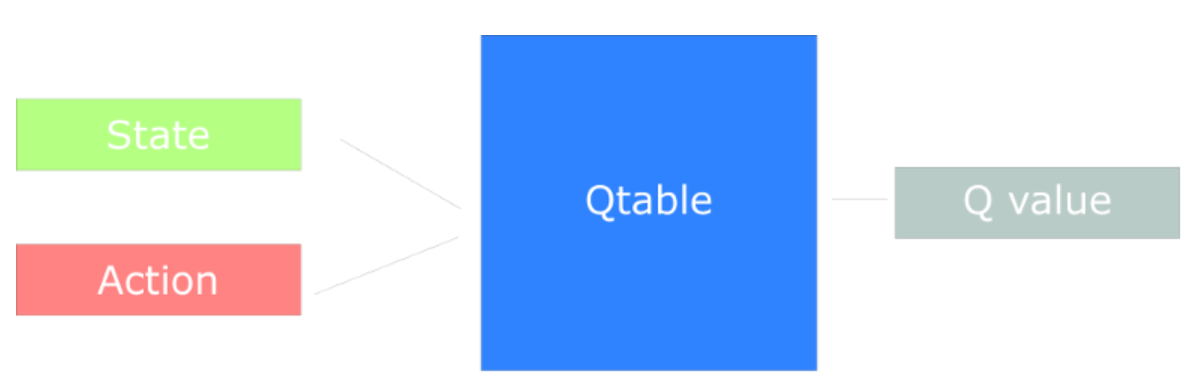
对于连续的状态集合$\mathcal{S}$,上述方法就不能适用了,这时可以引入神经网络来估计Q的值,即Deep Q-Learning,如下图所示:

接下来介绍Deep Q-Learning中常用的几种技巧,用于提升学习效果:
- Stack States:对于连续的状态集合,单个状态不能很好地描述整体的状况。例如下图所示,要判断黑色方块的移动方向,仅凭一副图像是无法判断的,需要连续的多幅图像才能判断出黑色方块在向右移动

- Experience Replay:如下图所示,防止算法在训练过程中忘记了之前场景获得的经验,创建一个Replay Buffer,不断回放之前的场景对算法进行训练;另一方面,相邻的场景之间(例如$[S_{t},A_{t},R_{t+1},S_{t+1}]$与$[S_{t+1},A_{t+1},R_{t+2},S_{t+2}]$)有着一定的相关性,为了防止算法被固定在某些特定的状态空间,从Replay Buffer中随机抽样选取场景进行训练(打乱场景之间的顺序,减少相邻场景的相关性)

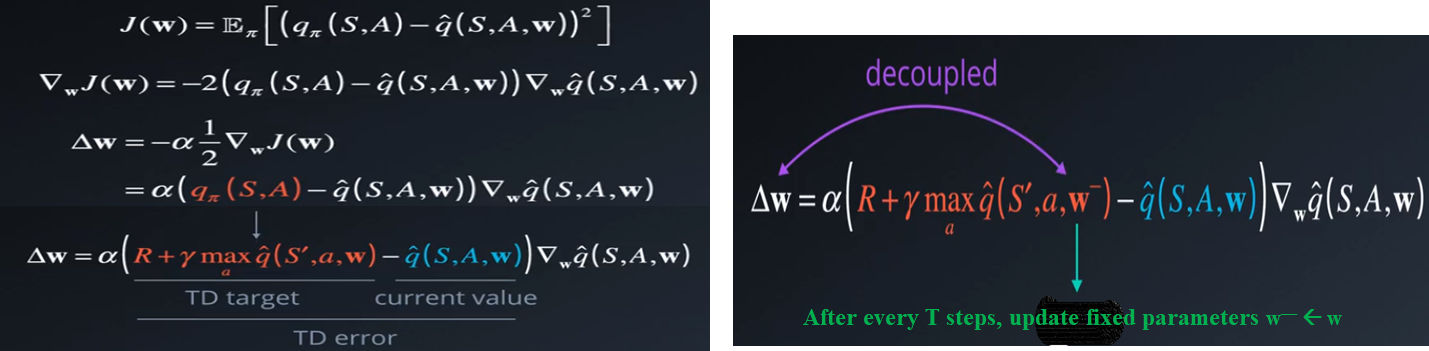
- Fixed Q-targets:针对Deep Q-Learning中计算Q值的神经网络的权重系数的更新,有公式如左图所示,此时将TD target近似为了$q_{\pi}(S,A)$的真值,但是当不断更新权重系数时TD target也是不断变化的,这就会使得在训练过程中$q_{\pi}(S,A)$的估计值要接近一个不断变化的值,加大了训练难度,减小了训练效率。解决方案如右图所示,使用相对固定的参数来估计TD target
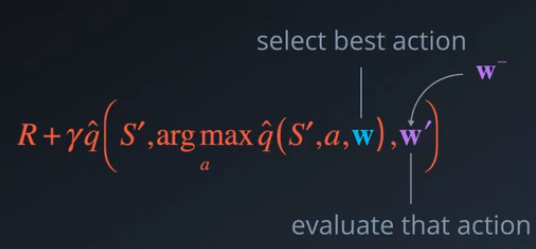
- Double DQNs:解决TD target对$q_{\pi}(S,A)$的真值可能高估的问题,方案是在计算TD target时使用两个不同的神经网络,将动作$a$的选择过程与TD target的计算过程进行分割。如果和Fixed Q-targets结合起来,可以直接使用$w$和$w^{-}$这两组参数(如下图所示)
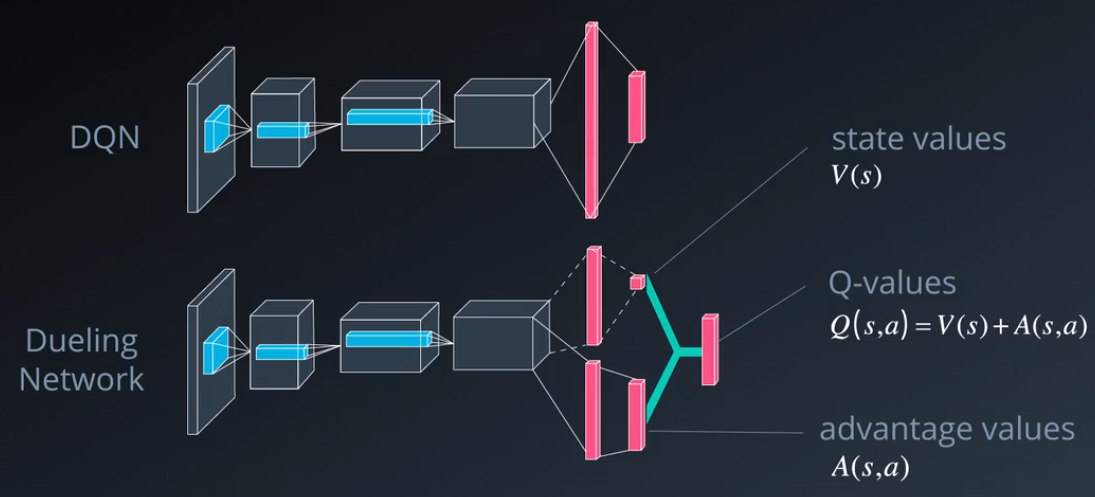
- Dueling DQN:如下图所示,相对于直接计算action-value function $Q(s,a)$,将$Q(s,a)$分解为state-value function $V(s)$与advantage-value function $A(s,a)$之和,这样做的原因是多数状态下采取何种行动对$Q(s,a)$的值影响不大,适合直接对状态函数$V(s)$进行估计,再叠加上不同行动对其的影响。在实际计算中,为了使得从$Q(s,a)$能够唯一确定$V(s)$与$A(s,a)$,可以令$A(s,a)$的均值(即$\frac{1}{|\mathcal{A}|}\sum_{a^{\prime}} A(s,a^{\prime})$)为0
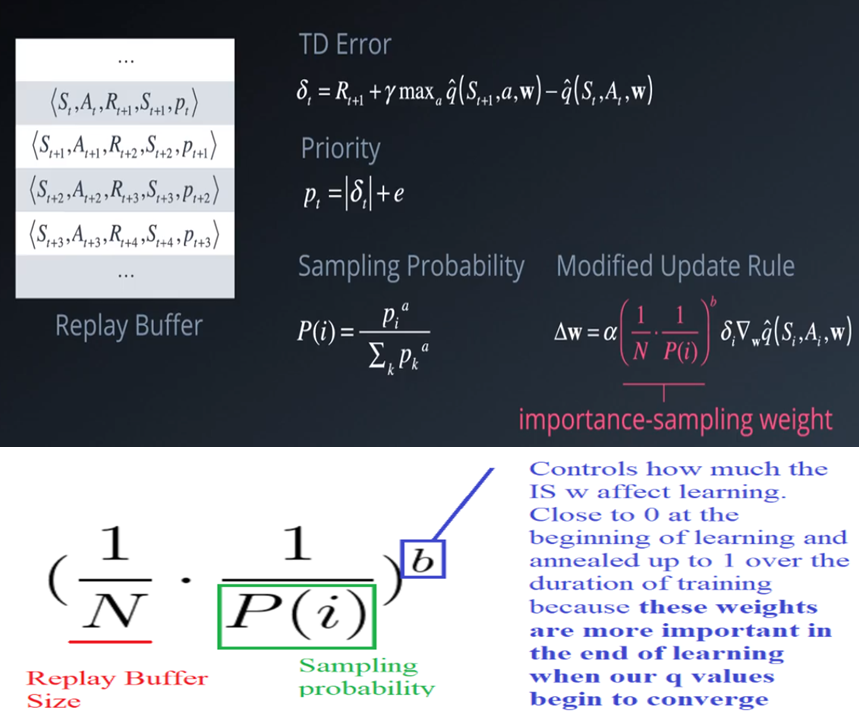
Prioritized Experience Replay:如下图所示,对Replay Buffer中的每个场景加入一个优先级,一个场景的TD error越大,它对应的优先级就越大。其中$e$是一个大于0的常数,防止抽样概率为0;$a$控制按优先级抽样和均匀抽样的比重,$a=1$时完全按优先级抽样,$a=0$时退化为均匀抽样;另外由于是按照优先级进行抽样,还需要改写神经网络中权重系数的更新规则,针对优先级高的场景减少权重更新的步长,使权重更新的过程与场景出现的真实概率一致(特别是在训练的后期,通过参数$b$控制),避免过拟合高优先级的场景
代码实现
使用vizdoom强化学习环境,以其中的一个任务为基础进行训练,该任务要确保玩家活着走到目标位置(要做到这一点,路上要躲避敌人的射击或者杀死敌人,否则不可能成功)。该任务每步的奖励与玩家和目标的距离变化有关(+dX for getting closer, -dX for getting further),此外若玩家死亡会有-100的惩罚。
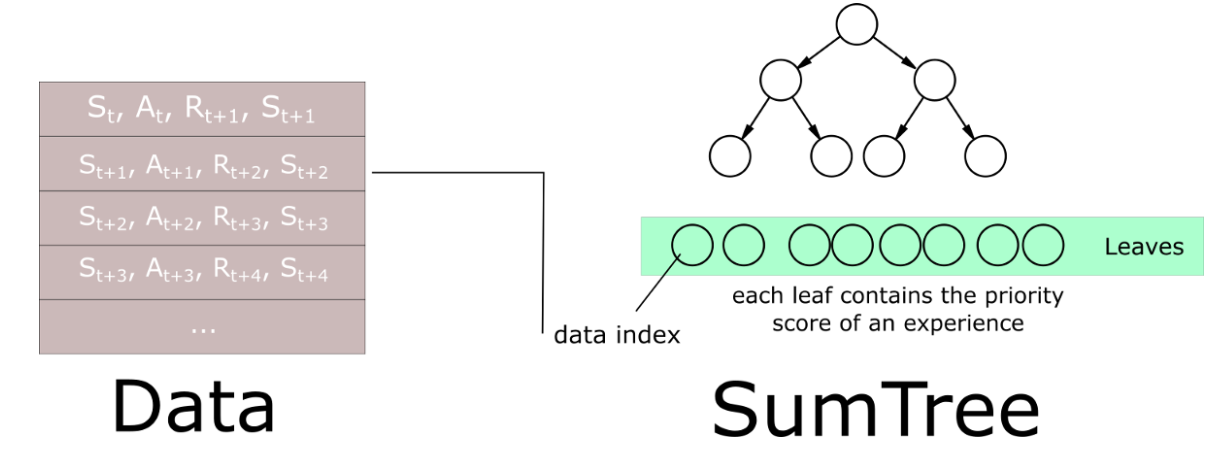
值得注意的是在代码中使用SumTree(二叉树,每个父节点的值是两个子节点的值的和)这一数据结构来存储Replay Buffer中的Priority,具体结构如下图所示,这样做的目的是方便按优先级进行抽样,可以使得每次抽样以及更新优先级的计算均为$O(\ln{n})$。在抽样过程中抽得的叶子节点$x$满足$P(x\leq{k})=\frac{\sum_{i=1}^{k}Priority_i}{\sum_{i=1}^{n}Priority_i},\text{ }k\in\{1,2,\cdots,n\}$
import tensorflow as tf # Deep Learning library
import numpy as np # Handle matrices
from vizdoom import * # Doom Environment
import random # Handling random number generation
import time # Handling time calculation
from skimage import transform# Help us to preprocess the frames
from collections import deque# Ordered collection with ends
import matplotlib.pyplot as plt # Display graphs
import warnings # This ignore all the warning messages that are normally printed during the training because of skiimage
warnings.filterwarnings('ignore') ### Here we create our environment
def create_environment():
game = DoomGame()
# Load the correct configuration
game.load_config("deadly_corridor.cfg")
# Load the correct scenario (in our case deadly_corridor scenario)
game.set_doom_scenario_path("deadly_corridor.wad")
game.init()
# Create an hot encoded version of our actions (7 possible actions)
possible_actions = np.identity(7,dtype=int).tolist()
return game, possible_actions
game, possible_actions = create_environment() ### Preprocess(reduce the complexity of states and the training time)
def preprocess_frame(frame):
# Grayscale frame(color not add important information, already done by the config file)
# Crop the screen (remove part that contains no information)
cropped_frame = frame[15:-5,20:-20] #[Up: Down, Left: right]
# Normalize Pixel Values
normalized_frame = cropped_frame/255.0
# Resize
preprocessed_frame = transform.resize(normalized_frame, [100,120])
return preprocessed_frame # 100x120x1 frame ### Stack frames
stack_size = 4 #stack 4 frames
# Initialize deque with zero-images, one array for each image
stacked_frames = deque([np.zeros((100,120), dtype=np.int) for i in range(stack_size)], maxlen=4)
def stack_frames(stacked_frames, state, is_new_episode):
frame = preprocess_frame(state) #preprocess frame
if is_new_episode:
# Clear our stacked_frames
stacked_frames = deque([np.zeros((100,120), dtype=np.int) for i in range(stack_size)], maxlen=4)
# Because we're in a new episode, copy the same frame 4x
stacked_frames.append(frame)
stacked_frames.append(frame)
stacked_frames.append(frame)
stacked_frames.append(frame)
# Stack the frames
stacked_state = np.stack(stacked_frames, axis=2)
else:
# Append frame to deque, automatically removes the oldest frame
stacked_frames.append(frame)
# Build the stacked state
stacked_state = np.stack(stacked_frames, axis=2)
return stacked_state, stacked_frames ### Set the hyperparameters
# MODEL HYPERPARAMETERS
state_size = [100,120,4] # Our input is a stack of 4 frames hence 100x120x4 (Width, height, channels)
action_size = game.get_available_buttons_size() # 7 possible actions
learning_rate = 0.00025 # Alpha (i.e., learning rate)
# TRAINING HYPERPARAMETERS
total_episodes = 5000 # Total episodes for training
max_steps = 5000 # Max possible steps in an episode
batch_size = 64
# FIXED Q TARGETS HYPERPARAMETERS
max_tau = 10000 # The number of steps where we update our target network
# EXPLORATION HYPERPARAMETERS for epsilon greedy strategy
explore_start = 1.0 # exploration probability at start
explore_stop = 0.01 # minimum exploration probability
decay_rate = 0.00005 # exponential decay rate for exploration prob
# Q LEARNING hyperparameters
gamma = 0.95 # Discounting rate
# MEMORY HYPERPARAMETERS(If you have GPU change to 1 million)
pretrain_length = 100000 # Number of experiences stored in the Memory when initialized for the first time
memory_size = 100000 # Number of experiences the Memory can keep
# MODIFY THIS TO FALSE IF YOU JUST WANT TO SEE THE TRAINED AGENT
training = True ### Set up Deep Q network and Target network (both are Dueling Network)
class DDDQNNet:
def __init__(self, state_size, action_size, learning_rate, name):
self.state_size = state_size
self.action_size = action_size
self.learning_rate = learning_rate
self.name = name
# use tf.variable_scope to know which network we're using (DQN or target_net)
# it will be useful when we will update our w- parameters (by copy the DQN parameters)
with tf.variable_scope(self.name):
# create the placeholders
self.inputs_ = tf.placeholder(tf.float32, [None, *state_size], name="inputs") #[None,100,120,4]
self.ISWeights_ = tf.placeholder(tf.float32, [None,1], name='IS_weights')
self.actions_ = tf.placeholder(tf.float32, [None, action_size], name="actions_")
# Remember that target_Q is the R(s,a) + max Qhat(s', a')
self.target_Q = tf.placeholder(tf.float32, [None], name="target")
# first conv layer
self.conv1 = tf.layers.conv2d(inputs = self.inputs_, filters = 32, kernel_size = [8,8], \
strides = [4,4], padding = "VALID", name = "conv1", \
kernel_initializer=tf.contrib.layers.xavier_initializer_conv2d())
self.conv1_out = tf.nn.elu(self.conv1, name="conv1_out")
# second conv layer
self.conv2 = tf.layers.conv2d(inputs = self.conv1_out, filters = 64, kernel_size = [4,4], \
strides = [2,2], padding = "VALID", name = "conv2", \
kernel_initializer=tf.contrib.layers.xavier_initializer_conv2d())
self.conv2_out = tf.nn.elu(self.conv2, name="conv2_out")
# third conv layer
self.conv3 = tf.layers.conv2d(inputs = self.conv2_out, filters = 128, kernel_size = [4,4], \
strides = [2,2], padding = "VALID", name = "conv3", \
kernel_initializer=tf.contrib.layers.xavier_initializer_conv2d())
self.conv3_out = tf.nn.elu(self.conv3, name="conv3_out")
self.flatten = tf.layers.flatten(self.conv3_out)
# Here we separate into two streams (Dueling Network)
# The one that calculate V(s)
self.value_fc = tf.layers.dense(inputs = self.flatten, units = 512, activation = tf.nn.elu, \
kernel_initializer=tf.contrib.layers.xavier_initializer(), \
name="value_fc")
self.value = tf.layers.dense(inputs = self.value_fc, units = 1, activation = None, \
kernel_initializer=tf.contrib.layers.xavier_initializer(), \
name="value")
# The one that calculate A(s,a)
self.advantage_fc = tf.layers.dense(inputs = self.flatten, units = 512, activation = tf.nn.elu, \
kernel_initializer=tf.contrib.layers.xavier_initializer(), \
name="advantage_fc")
self.advantage = tf.layers.dense(inputs = self.advantage_fc, units = self.action_size, activation = None, \
kernel_initializer=tf.contrib.layers.xavier_initializer(), \
name="advantages")
# Agregating layer
# Q(s,a) = V(s) + (A(s,a) - 1/|A| * sum A(s,a'))
self.output = self.value + tf.subtract(self.advantage, tf.reduce_mean(self.advantage, axis=1, keepdims=True))
# Predicted Q value
self.Q = tf.reduce_sum(tf.multiply(self.output, self.actions_), axis=1)
# For computing priority and updating Sumtree
self.absolute_errors = tf.abs(self.target_Q - self.Q)
# The loss is modified because of Priority Experience Replay
self.loss = tf.reduce_mean(self.ISWeights_ * tf.squared_difference(self.target_Q, self.Q))
self.optimizer = tf.train.RMSPropOptimizer(self.learning_rate).minimize(self.loss)
# Reset the graph
tf.reset_default_graph()
# Instantiate the DQNetwork
DQNetwork = DDDQNNet(state_size, action_size, learning_rate, name="DQNetwork")
# Instantiate the target network
TargetNetwork = DDDQNNet(state_size, action_size, learning_rate, name="TargetNetwork") ### Data Struture to store experience and priority(SumTree)
class SumTree(object):
data_pointer = 0
# Here we initialize the tree with all nodes = 0, and initialize the data with all values = 0
def __init__(self, capacity):
self.capacity = capacity # Number of leaf nodes (final nodes) that contains experiences
# Generate the tree with all nodes values = 0
# Parent nodes = capacity - 1, Leaf nodes = capacity
self.tree = np.zeros(2 * capacity - 1)
# Contains the experiences (so the size of data is capacity)
self.data = np.zeros(capacity, dtype=object)
# Here we add our priority score in the sumtree leaf and add the experience in data
def add(self, priority, data):
# Look at what index we want to put the experience
tree_index = self.data_pointer + self.capacity - 1 # the leaves from left to right
self.data[self.data_pointer] = data # Update data frames
self.update(tree_index, priority) # Update the leaf
self.data_pointer += 1 # Add 1 to data_pointer
# If we're above the capacity, you go back to first index (we overwrite)
if self.data_pointer >= self.capacity:
self.data_pointer = 0
# Update the leaf priority score and propagate the change through tree
def update(self, tree_index, priority):
# Change = new priority score - former priority score
change = priority - self.tree[tree_index]
self.tree[tree_index] = priority
# Propagate the change through tree
while tree_index != 0:
tree_index = (tree_index - 1) // 2
self.tree[tree_index] += change
# Here we get the leaf and associated experience
# the returned index is the smallest index satisfying: sum(leaf priority) >= v for leaf index <= returned index
def get_leaf(self, v):
parent_index = 0
while True:
left_child_index = 2 * parent_index + 1
right_child_index = left_child_index + 1
# If we reach bottom, end the search
if left_child_index >= len(self.tree):
leaf_index = parent_index
break
else: # downward search
if v <= self.tree[left_child_index]:
parent_index = left_child_index
else:
v -= self.tree[left_child_index]
parent_index = right_child_index
data_index = leaf_index - self.capacity + 1
return leaf_index, self.tree[leaf_index], self.data[data_index]
@property
def total_priority(self):
return self.tree[0] # Returns the root node ### Create Replay Buffer and Prioritized Experience Replay
class Memory(object):
PER_e = 0.01 # Hyperparameter that we use to avoid some experiences to have 0 probability of being taken
PER_a = 0.6 # Hyperparameter that we use to make a tradeoff between taking only exp with high priority and sampling randomly
PER_b = 0.4 # importance-sampling, from initial value increasing to 1
PER_b_increment_per_sampling = 0.001
absolute_error_upper = 1. # clipped abs error
def __init__(self, capacity):
# Making the tree
self.tree = SumTree(capacity)
# Store a new experience in our tree
# Each new experience have a score of max_prority (it will be then improved when we use this exp to train our DDQN)
def store(self, experience):
# Find the max priority
max_priority = np.max(self.tree.tree[-self.tree.capacity:])
# If the max priority = 0 we can't put priority = 0 since this exp will never have a chance to be selected
# So we use an upper limit
if max_priority == 0:
max_priority = self.absolute_error_upper
self.tree.add(max_priority, experience) # set the max p for new exp
# First, to sample a minibatch of n size, the range [0, priority_total] is split into n ranges.
# Then a value is uniformly sampled from each range
# We search in the sumtree, the experience where priority score correspond to sample values are retrieved from
# Finally, we calculate IS weights for each minibatch element
def sample(self, n):
memory_b = [] # Create a sample array that will contains the minibatch
b_idx, b_ISWeights = np.empty((n,), dtype=np.int32), np.empty((n, 1), dtype=np.float32)
priority_segment = self.tree.total_priority / n # priority segment
# Here we increasing the PER_b each time we sample a new minibatch
self.PER_b = np.min([1., self.PER_b + self.PER_b_increment_per_sampling]) # max = 1
# Calculating the max_weight
p_min = np.min(self.tree.tree[-self.tree.capacity:]) / self.tree.total_priority
max_weight = (p_min * n) ** (-self.PER_b)
for i in range(n):
# A value is uniformly sample from each range
a, b = priority_segment * i, priority_segment * (i + 1)
value = np.random.uniform(a, b)
# Experience that correspond to each value is retrieved
index, priority, data = self.tree.get_leaf(value)
sampling_probabilities = priority / self.tree.total_priority # P(j)
# IS = (1/N * 1/P(i))**b /max wi == (N*P(i))**-b /max wi
b_ISWeights[i, 0] = np.power(n * sampling_probabilities, -self.PER_b)/ max_weight
b_idx[i]= index
experience = [data]
memory_b.append(experience)
return b_idx, memory_b, b_ISWeights
# Update the priorities on the tree
def batch_update(self, tree_idx, abs_errors):
abs_errors += self.PER_e # convert to abs and avoid 0
clipped_errors = np.minimum(abs_errors, self.absolute_error_upper)
ps = np.power(clipped_errors, self.PER_a)
for ti, p in zip(tree_idx, ps):
self.tree.update(ti, p) ### Deal with the empty memory problem (pre-populate memory by taking random actions and storing the experience)
memory = Memory(memory_size) # Instantiate memory
game.new_episode() # Render the environment
for i in range(pretrain_length):
# If it's the first step
if i == 0:
# First we need a state
state = game.get_state().screen_buffer
state, stacked_frames = stack_frames(stacked_frames, state, True)
action = random.choice(possible_actions) # Random action
reward = game.make_action(action) # Get the rewards
done = game.is_episode_finished() # Look if the episode is finished
# If the player is dead
if done:
# the episode ends so no next state
next_state = np.zeros((120,140), dtype=np.int)
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
# Add experience to memory
experience = state, action, reward, next_state, done
memory.store(experience)
# Start a new episode
game.new_episode()
# First we need a state
state = game.get_state().screen_buffer
# Stack the frames
state, stacked_frames = stack_frames(stacked_frames, state, True)
else:
# Get the next state
next_state = game.get_state().screen_buffer
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
# Add experience to memory
experience = state, action, reward, next_state, done
memory.store(experience)
# Our state is now the next_state
state = next_state ### Choose action from Q (use ϵ-greedy strategy)
def predict_action(explore_start, explore_stop, decay_rate, decay_step, state, actions):
exp_exp_tradeoff = np.random.rand() # First we randomize a number
explore_probability = explore_stop + (explore_start - explore_stop) * np.exp(-decay_rate * decay_step)
if (explore_probability > exp_exp_tradeoff):
# Make a random action (exploration)
action = random.choice(actions)
else:
# Get action from Q-network (exploitation)
# Estimate the Qs values state
Qs = sess.run(DQNetwork.output, feed_dict = {DQNetwork.inputs_: state.reshape((1, *state.shape))})
# Take the biggest Q value (= the best action)
choice = np.argmax(Qs)
action = actions[int(choice)]
return action, explore_probability ### Copy the parameters of DQN to Target_network (used for Fixed Q-target and Double DQN)
def update_target_graph():
# Get the parameters of our DQNNetwork
from_vars = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, "DQNetwork")
# Get the parameters of our Target_network
to_vars = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, "TargetNetwork")
op_holder = []
# Update our target_network parameters with DQNNetwork parameters
for from_var,to_var in zip(from_vars,to_vars):
op_holder.append(to_var.assign(from_var))
return op_holder ### Train the agent
saver = tf.train.Saver() # Saver will help us to save our model
if training == True:
with tf.Session() as sess:
sess.run(tf.global_variables_initializer()) # Initialize the variables
decay_step = 0 # Initialize the decay step
tau = 0 # Set tau = 0
game.init() # Init the game
# Update the parameters of our TargetNetwork with DQN_weights
update_target = update_target_graph()
sess.run(update_target)
for episode in range(total_episodes):
step = 0 # Set step to 0
episode_rewards = [] # Initialize the rewards of the episode
game.new_episode() # Make a new episode and observe the first state
state = game.get_state().screen_buffer
state, stacked_frames = stack_frames(stacked_frames, state, True)
while step < max_steps:
step += 1
tau += 1
decay_step +=1
# ϵ-greedy stragety
action, explore_probability = predict_action(explore_start, explore_stop, decay_rate, decay_step, state, possible_actions)
reward = game.make_action(action) # Do the action
done = game.is_episode_finished() # Look if the episode is finished
episode_rewards.append(reward) # Add the reward to total reward
# If the game is finished
if done:
# the episode ends so no next state
next_state = np.zeros((120,140), dtype=np.int)
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
# Set step = max_steps to end the episode
step = max_steps
# Get the total reward of the episode
total_reward = np.sum(episode_rewards)
print('Episode: {}'.format(episode), 'Total reward: {}'.format(total_reward), \
'Training loss: {:.4f}'.format(loss), 'Explore P: {:.4f}'.format(explore_probability))
# Add experience to memory
experience = state, action, reward, next_state, done
memory.store(experience)
else:
next_state = game.get_state().screen_buffer # Get the next state
# Stack the frame of the next_state
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
# Add experience to memory
experience = state, action, reward, next_state, done
memory.store(experience)
state = next_state
# LEARNING PART
tree_idx, batch, ISWeights_mb = memory.sample(batch_size) # Obtain random mini-batch from memory
states_mb = np.array([each[0][0] for each in batch], ndmin=3)
actions_mb = np.array([each[0][1] for each in batch])
rewards_mb = np.array([each[0][2] for each in batch])
next_states_mb = np.array([each[0][3] for each in batch], ndmin=3)
dones_mb = np.array([each[0][4] for each in batch])
target_Qs_batch = []
# DOUBLE DQN
# Use DQNNetwork to select the action a' to take at next_state s' (action with the highest Q-value)
# Use TargetNetwork to calculate the Q_val of Q(s',a')
# Get Q values for next_state
q_next_state = sess.run(DQNetwork.output, feed_dict = {DQNetwork.inputs_: next_states_mb})
# Calculate Qtarget for all actions at that state
q_target_next_state = sess.run(TargetNetwork.output, feed_dict = {TargetNetwork.inputs_: next_states_mb})
# Set Q_target = r if the episode ends at s+1, otherwise set Q_target = r + gamma * Qtarget(s',a')
for i in range(0, len(batch)):
terminal = dones_mb[i]
# We got a'
action = np.argmax(q_next_state[i])
# If we are in a terminal state, only equals reward
if terminal:
target_Qs_batch.append(rewards_mb[i])
else:
# Take the Qtarget for action a'
target = rewards_mb[i] + gamma * q_target_next_state[i][action]
target_Qs_batch.append(target)
targets_mb = np.array([each for each in target_Qs_batch])
# Optimize
_, loss, absolute_errors = sess.run([DQNetwork.optimizer, DQNetwork.loss, DQNetwork.absolute_errors], \
feed_dict={DQNetwork.inputs_: states_mb, DQNetwork.target_Q: targets_mb, \
DQNetwork.actions_: actions_mb, DQNetwork.ISWeights_: ISWeights_mb})
# Update priority
memory.batch_update(tree_idx, absolute_errors)
# Fixed Q target
if tau > max_tau:
# Update the parameters of our TargetNetwork with DQN_weights
update_target = update_target_graph()
sess.run(update_target)
tau = 0
print("Model updated")
# Save model every 5 episodes
if episode % 5 == 0:
save_path = saver.save(sess, "./models/model.ckpt")
print("Model Saved") ### Watch the agent play
with tf.Session() as sess:
game = DoomGame()
# Load the correct configuration (TESTING)
game.load_config("deadly_corridor_testing.cfg")
# Load the correct scenario (in our case deadly_corridor scenario)
game.set_doom_scenario_path("deadly_corridor.wad")
game.init()
# Load the model
saver.restore(sess, "./models/model.ckpt")
for i in range(10):
game.new_episode()
state = game.get_state().screen_buffer
state, stacked_frames = stack_frames(stacked_frames, state, True)
while not game.is_episode_finished():
# EPSILON GREEDY STRATEGY
exp_exp_tradeoff = np.random.rand()
explore_probability = 0.01
if (explore_probability > exp_exp_tradeoff):
# Make a random action (exploration)
action = random.choice(possible_actions)
else:
# Get action from Q-network (exploitation)
Qs = sess.run(DQNetwork.output, feed_dict = {DQNetwork.inputs_: state.reshape((1, *state.shape))})
choice = np.argmax(Qs) # Take the biggest Q value (= the best action)
action = possible_actions[int(choice)]
game.make_action(action)
done = game.is_episode_finished()
if done:
break
else:
next_state = game.get_state().screen_buffer
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
state = next_state
score = game.get_total_reward()
print("Score: ", score)
game.close()
深度强化学习:Deep Q-Learning的更多相关文章
- 强化学习9-Deep Q Learning
之前讲到Sarsa和Q Learning都不太适合解决大规模问题,为什么呢? 因为传统的强化学习都有一张Q表,这张Q表记录了每个状态下,每个动作的q值,但是现实问题往往极其复杂,其状态非常多,甚至是连 ...
- 强化学习_Deep Q Learning(DQN)_代码解析
Deep Q Learning 使用gym的CartPole作为环境,使用QDN解决离散动作空间的问题. 一.导入需要的包和定义超参数 import tensorflow as tf import n ...
- 深度增强学习--Deep Q Network
从这里开始换个游戏演示,cartpole游戏 Deep Q Network 实例代码 import sys import gym import pylab import random import n ...
- 【资料总结】| Deep Reinforcement Learning 深度强化学习
在机器学习中,我们经常会分类为有监督学习和无监督学习,但是尝尝会忽略一个重要的分支,强化学习.有监督学习和无监督学习非常好去区分,学习的目标,有无标签等都是区分标准.如果说监督学习的目标是预测,那么强 ...
- 深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction
转自https://zhuanlan.zhihu.com/p/25239682 过去的一段时间在深度强化学习领域投入了不少精力,工作中也在应用DRL解决业务问题.子曰:温故而知新,在进一步深入研究和应 ...
- 深度强化学习(DQN-Deep Q Network)之应用-Flappy Bird
深度强化学习(DQN-Deep Q Network)之应用-Flappy Bird 本文系作者原创,转载请注明出处:https://www.cnblogs.com/further-further-fu ...
- 一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm)
一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm) 2017-12-25 16:29:19 对于 A3C 算法感觉自己总是一知半解,现将其梳理一下,记录在此,也 ...
- (转) 深度强化学习综述:从AlphaGo背后的力量到学习资源分享(附论文)
本文转自:http://mp.weixin.qq.com/s/aAHbybdbs_GtY8OyU6h5WA 专题 | 深度强化学习综述:从AlphaGo背后的力量到学习资源分享(附论文) 原创 201 ...
- 深度强化学习——连续动作控制DDPG、NAF
一.存在的问题 DQN是一个面向离散控制的算法,即输出的动作是离散的.对应到Atari 游戏中,只需要几个离散的键盘或手柄按键进行控制. 然而在实际中,控制问题则是连续的,高维的,比如一个具有6个关节 ...
- 深度强化学习(DRL)专栏(一)
目录: 1. 引言 专栏知识结构 从AlphaGo看深度强化学习 2. 强化学习基础知识 强化学习问题 马尔科夫决策过程 最优价值函数和贝尔曼方程 3. 有模型的强化学习方法 价值迭代 策略迭代 4. ...
随机推荐
- oracle终止用户会话
1.创建两个测试用户进行实验 执行命令如下: create user test1 identified by 1; create user test2 identified by 1; grant d ...
- apache 添加多个站点
虚拟主机 (Virtual Host) 是在同一台机器搭建属于不同域名或者基于不同 IP 的多个网站服务的技术.可以为运行在同一物理机器上的各个网站指配不同的 IP 和端口,也可让多个网站拥有不同的域 ...
- Java 中的链式编程
前言 在写项目的时候,有一个实体类有好多个属性,new 出来之后需要不停的使用setXXX( )方法,效率低而且代码可读性差,查询了下发现可以实现实体类的链式编程. public class Us ...
- Module not found: Error: Can't resolve './style':配置 extensions 的坑
ERROR in ./src/index.js Module not found: Error: Can't resolve './style' in 'D:\gitcode\github\learn ...
- 疯狂Python讲义PDF高清完整版免费下载|百度网盘
百度网盘:疯狂Python讲义PDF高清完整版免费下载 提取码:uzba 内容简介 <疯狂Python讲义>既是一本适合初学者入门Python的图书(一个8岁的小朋友在未出版前已学习了本书 ...
- 金字塔卷积:Pyramidal Convolution
论文地址:https://arxiv.org/pdf/2006.11538.pdf github:https://github.com/iduta/pyconv 作者认为,当前CNN主要存在两个不足: ...
- 移动端rem字体适配JS
// 『REM』手机屏幕适配,兼容更改过默认字体大小的安卓用户 function adapt(designWidth, rem2px) { // designWidth:'设计图宽度' 1rem==r ...
- Spring学习之Spring与Mybatis的两种整合方式
本机使用IDEA 2020.1.MySql 8.0.19,通过Maven进行构建 环境准备 导入maven依赖包 <dependencies> <dependency> < ...
- Day02_企业权限管理(SSM整合)
学于黑马程序员和传智播客联合做的教学项目 感谢 黑马程序员官网 传智播客官网 个人根据教程的每天的工作进度的代码和资料 密码:cti5 b站在线视频 微信搜索"艺术行者",关注并回 ...
- PHP array_pop() 函数
实例 删除数组中的最后一个元素: <?php$a=array("red","green","blue");array_pop($a); ...