ARM开发板实现双系统引导的一种方法——基于迅为iTOP-4412开发板
前言
本文所用的uboot代码为迅为官方提供,开发板是迅为iTOP-4412开发板。本文如有错误,欢迎指正。
首先,我们确定一下系统启动的流程:首先启动uboot,uboot启动内核并挂载rootfs(根文件系统),内核启动完成且rootfs工作完成后,挂载emmc上的文件系统,操作系统正式开始工作。(读者要弄懂根文件系统和普通文件系统的区别与联系,网上资料很多,本文不作赘述。)
本文实现的双系统引导,都是基于Linux的,即两个系统使用同一个内核、同一个根文件系统,只是emmc上的文件系统有所不同。第一个系统是一个最小Linux系统,第二个系统是一个带Qt/E的Linux系统。uboot启动后会从mmcblk0p4分区中读取一定长度的字符串,若字符串是“qte”,则启动带Qt/E的Linux系统;若字符串是“lin”,则启动最小Linux系统。
1.分区信息
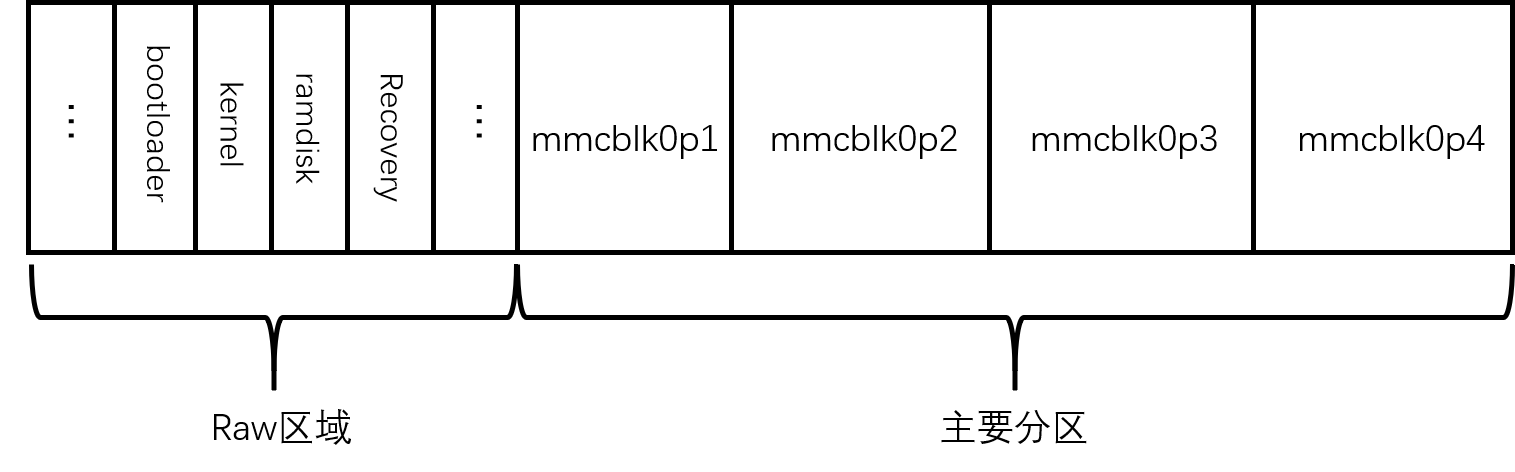
上图是emmc的分区信息。可以看到,分成了两个部分“Raw区域”和“主要分区”。Raw区域中我们主要关注bootloader、kernel、ramdisk这三个分区。ramdisk中存放根文件系统(rootfs),kernel中存放内核,bootloader中存放uboot。在主要分区中,mmcblk0p1指的是emmc的第一个分区,mmcblk0p2指的是emmc的第二个分区,mmcblk0p3指的是emmc的第三个分区,mmcblk0p4指的是emmc的第四个分区。mmcblk0指emmc,mmcblk1指SD卡。
(1) 打开开发板和串口终端,摁回车进入uboot模式,在串口终端输入命令“fdisk -p mmc”,可以看到开发板emmc的“主要分区”信息,如下图所示。

mmcblk0p1占12536MB,mmcblk0p2占1024MB,mmcblk0p3占1024MB,mmcblk0p4占300MB。
(2) 在串口终端输入命令“fastboot”,可以看到“Raw区域”和“主要分区”的详细信息,如下图所示。

其中,“bootloader”、“kernel”、“ramdisk”、“Recovery”分别对应“Raw区域”中的四个分区,“system”、“userdata”、“cache”、“fat”分别对应“主要分区”中的mmcblk0p2、mmcblk0p3、mmcblk0p4、mmcblk0p1四个分区。“system”中存放的就是操作系统的文件系统,在默认情况下,uboot引导起内核,内核启动完成后,会挂载位于“system”中的文件系统。要实现双系统引导,我们可以把第一个系统存放在“system”分区中,把第二个系统存放在“userdata”分区中,在启动时,让内核在两个分区的文件系统中进行选择。
(3) 在串口终端输入命令“printenv”,可以看到环境变量信息,如下图所示。

这里我们主要分析“bootcmd=movi read kernel 40008000;movi read rootfs 40df0000 100000;bootm 40008000 40df0000”这个语句,该语句的作用是把“movi read kernel 40008000;movi read rootfs 40df0000 100000;bootm 40008000 40df0000”赋给bootcmd变量。
而bootcmd变量的值就是uboot启动后要执行的命令:先把内核从kernel分区中读取到内存的0x40008000处;再从ramdisk分区中(此处的rootfs分区实际就是指ramdisk分区,因为uboot判断分区时只判断首字母,所以即使写rootfs,仍然会导向ramdisk分区,这里写成rootfs是为了方便用户理解)读取0x100000个字节到内存的0x40df0000处;最后使用bootm命令,启动(挂载)已经读取到内存中的内核和根文件系统。
在正常情况下,环境变量中还应有一个bootargs变量,bootargs的值就是uboot要传递给内核的参数,但是在上图的环境变量信息中并没有发现它,所以我们猜测迅为给的uboot源码中并没有给bootargs变量赋值。
2.uboot源码分析
(1) 在uboot源码的“iTop4412_uboot/include/movi.h”文件中可以看到Raw区域的信息,如下。
#define MAGIC_NUMBER_MOVI (0x24564236) #define SS_SIZE (16 * 1024) #define eFUSE_SIZE (1 * 512) // 512 Byte eFuse, 512 Byte reserved #define MOVI_BLKSIZE (1<<9)
//mj defined
#define FWBL1_SIZE (8* 1024) //IROM BL1 SIZE 8KB
#define BL2_SIZE (16 * 1024)//uboot BL2 16KB /* partition information */
#define PART_SIZE_UBOOT (495 * 1024)
#define PART_SIZE_KERNEL (6 * 1024 * 1024) #define PART_SIZE_ROOTFS (2 * 1024 * 1024)// 2M
#define RAW_AREA_SIZE (16 * 1024 * 1024)// 16MB #define MOVI_RAW_BLKCNT (RAW_AREA_SIZE / MOVI_BLKSIZE)
#define MOVI_FWBL1_BLKCNT (FWBL1_SIZE / MOVI_BLKSIZE)
#define MOVI_BL2_BLKCNT (BL2_SIZE / MOVI_BLKSIZE)
#define MOVI_ENV_BLKCNT (CONFIG_ENV_SIZE / MOVI_BLKSIZE)
#define MOVI_UBOOT_BLKCNT (PART_SIZE_UBOOT / MOVI_BLKSIZE)
#define MOVI_ZIMAGE_BLKCNT (PART_SIZE_KERNEL / MOVI_BLKSIZE)
#define ENV_START_BLOCK (544*1024)/MOVI_BLKSIZE #define MOVI_UBOOT_POS ((eFUSE_SIZE / MOVI_BLKSIZE) + MOVI_FWBL1_BLKCNT + MOVI_BL2_BLKCNT) #define MOVI_ROOTFS_BLKCNT (PART_SIZE_ROOTFS / MOVI_BLKSIZE)
Raw区域总大小为16MB,包含了BL1、BL2、环境变量、内核、rootfs、uboot等信息。我们主要关注kernel、rootfs、uboot这三部分。内核存放在kernel分区中,根文件系统(rootfs)存放在ramdisk分区中、uboot存放在bootloader分区中。
(2) 而对“Raw区域”和“主要分区”的操作,则在“iTop4412_uboot/common/cmd_fastboot.c”文件的“set_partition_table_sdmmc”函数中,如下(请看注释)。
static int set_partition_table_sdmmc()
{
int start, count;
unsigned char pid; pcount = ; #if defined(CONFIG_FUSED)
/* FW BL1 for fused chip */
strcpy(ptable[pcount].name, "fwbl1");
ptable[pcount].start = ;
ptable[pcount].length = ;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MOVI_CMD;
pcount++;
#endif /* Bootloader */
strcpy(ptable[pcount].name, "bootloader"); //Raw区域中的bootloader分区,存放uboot
ptable[pcount].start = ;
ptable[pcount].length = ;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MOVI_CMD;
pcount++; /* Kernel */
strcpy(ptable[pcount].name, "kernel"); //Raw区域中的kernel分区,存放内核
ptable[pcount].start = ;
ptable[pcount].length = ;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MOVI_CMD;
pcount++; /* Ramdisk */
strcpy(ptable[pcount].name, "ramdisk"); //Raw区域中的ramdisk分区,存放rootfs(根文件系统)
ptable[pcount].start = ;
ptable[pcount].length = 0x300000;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MOVI_CMD;
pcount++; /* Recovery*/
#ifdef CONFIG_RECOVERY //mj
strcpy(ptable[pcount].name, "Recovery"); //Raw区域中的Recovery分区
ptable[pcount].start = ;
ptable[pcount].length = 0x600000; //6MB
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MOVI_CMD;
pcount++; /* System */
get_mmc_part_info((dev_number_write == )?"":"", , &start, &count, &pid); //主要分区中的mmcblk0p2分区,存放操作系统的文件系统
if (pid != 0x83)
goto part_type_error;
strcpy(ptable[pcount].name, "system");
ptable[pcount].start = start * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].length = count * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MMC_CMD;
pcount++; /* User Data */
get_mmc_part_info((dev_number_write == )?"":"", , &start, &count, &pid); //主要分区中的mmcblk0p3分区
if (pid != 0x83)
goto part_type_error;
strcpy(ptable[pcount].name, "userdata");
ptable[pcount].start = start * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].length = count * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MMC_CMD;
pcount++; /* Cache */
get_mmc_part_info((dev_number_write == )?"":"", , &start, &count, &pid); //主要分区中的mmcblk0p4分区
if (pid != 0x83)
goto part_type_error;
strcpy(ptable[pcount].name, "cache");
ptable[pcount].start = start * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].length = count * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MMC_CMD;
pcount++; /* Fat */
get_mmc_part_info((dev_number_write == )?"":"", , &start, &count, &pid); //主要分区中的mmcblk0p1分区
if (pid != 0xc)
goto part_type_error;
strcpy(ptable[pcount].name, "fat");
ptable[pcount].start = start * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].length = count * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MMC_CMD;
pcount++; #if 1 // Debug
fastboot_flash_dump_ptn();
#endif LCD_setleftcolor(0x8a2be2); return ; part_type_error:
printf("Error: No MBR is found at SD/MMC.\n");
printf("Hint: use fdisk command to make partitions.\n"); return -;
}
(3) 在“iTop4412_uboot/board/samsung/smdkc210/smdkc210.c”文件的“board_late_init”函数中,可以看到关于bootcmd变量的信息,如下。
int board_late_init (void)
{
int ret = check_bootmode();
if ((ret == BOOT_MMCSD || ret == BOOT_EMMC441 || ret == BOOT_EMMC43 )
&& boot_mode == ) {
//printf("board_late_init\n");
char boot_cmd[]; #if 0
sprintf(boot_cmd, "movi read kernel 40008000;movi read rootfs 40d00000 100000;bootm 40008000 40d00000"); //这条语句不会编译
#else
#ifdef SMDK4412_SUPPORT_UBUNTU
sprintf(boot_cmd, "movi read kernel 40008000;bootm 40008000 40d00000"); //这条语句不会编译
#else
sprintf(boot_cmd, "movi read kernel 40008000;movi read rootfs 40df0000 100000;bootm 40008000 40df0000"); //只有这条关于bootcmd变量的语句会编译
#endif
#endif
/* end modify */
setenv("bootcmd", boot_cmd);
//setenv("bootargs", "root=/dev/mmcblk0p2");
} return ;
}
3.修改uboot源码
大概思路已经在前面讲过,为了方便读者理解,再详述一下双系统引导的思路。两个系统共用同一套uboot、内核、rootfs(根文件系统),在mmcblk0p2分区中存放一个系统,在mmcblk0p3中存放另一个系统,uboot每次启动时,会从mmcblk0p4分区中读取定长的字符串,根据字符串的内容来决定该引导哪一个系统。
(1) 打开“iTop4412_uboot/common/cmd_fastboot.c”文件,修改“set_partition_table_sdmmc”函数中有关mmcblk0p2分区和mmcblk0p3分区的命名部分(只修改分区名称,其他的不做修改),将原先的“system”和“userdata”两个分区名称改为“system_linux”和“system_qte”,方便记忆。
/* Linux System */
get_mmc_part_info((dev_number_write == )?"":"", , &start, &count, &pid); //主要分区中的mmcblk0p2分区,用于存放最小Linux系统
if (pid != 0x83)
goto part_type_error;
strcpy(ptable[pcount].name, "system_qte"); //分区名改为system_qte
ptable[pcount].start = start * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].length = count * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MMC_CMD;
pcount++; /* Qt/E System */
get_mmc_part_info((dev_number_write == )?"":"", , &start, &count, &pid); //主要分区中的mmcblk0p3分区,用于存放Qt/E系统
if (pid != 0x83)
goto part_type_error;
//strcpy(ptable[pcount].name, "userdata");
strcpy(ptable[pcount].name, "system_linux"); //分区名改为system_linux
ptable[pcount].start = start * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].length = count * CFG_FASTBOOT_SDMMC_BLOCKSIZE;
ptable[pcount].flags = FASTBOOT_PTENTRY_FLAGS_USE_MMC_CMD;
pcount++;
(2) 打开“iTop4412_uboot/common/main.c”文件,在“main_loop”函数中添加如下代码
char bootargstr[];
run_command("mmc read 0 40008000 408000 10", ); //从emmc的0x408000块处读取0x10个块的数据到内存的0x40008000处,至于为什么从emmc的0x408000处读,请看后文的解析
memcpy(bootargstr, (char*)0x40008000, ); //把读取到的数据赋给bootargstr
if(!strncmp(bootargstr, "qte", )) //判断bootargstr的内容,如果是字符串“qte”
sprintf(bootargstr, "root=/dev/mmcblk0p2"); //把mmcblk0p2设置为系统的根,即启动带Qt/E的Linux系统
else
sprintf(bootargstr, "root=/dev/mmcblk0p3"); //把mmcblk0p3设置为根,即启动最小Linux系统
setenv("bootargs", bootargstr); //设置环境变量bootargs,把bootargstr字符串的内容赋给环境变量bootargs
添加位置如下图所示。

为什么要从emmc的0x408000块处读字符串呢?首先我们明确一下“mmc read”命令的用法:mmc read <device num> addr blk# cnt [partition],即从某设备的第blk#个块(一个块为512B)开始,读取cnt个块的数据,将数据存放到内存的addr位置。其次,在前文中我们曾经获取过emmc的“主要分区”信息,如下图

可以看到mmcblk0p4分区的起始块(block start #)是4227072,这是个十进制数,我们把它转换为十六进制,便得到了0x408000。
4.编译和烧写
(1) 编译修改后的uboot,用fastboot工具将其烧写到开发板中。
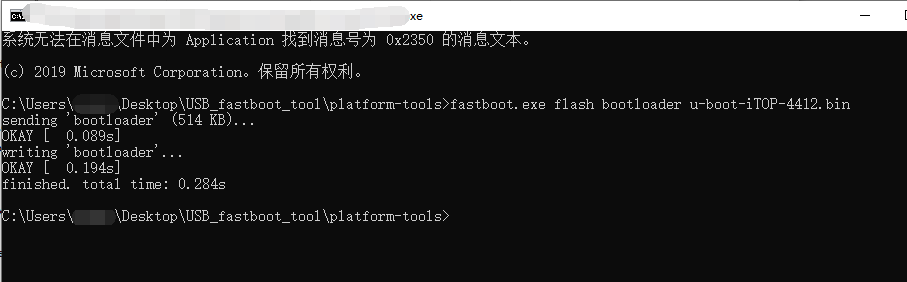
烧写完成后,重启开发板,并进入uboot模式。在串口终端输入命令“printenv”,可以看到环境变量中又添加了一个bootargs变量,它是用来告诉内核要挂载哪个分区中的文件系统的,挂载不同的文件系统,就实现了不同系统的引导。根据bootargs变量的值可知,目前要引导的系统是位于mmcblk0p3分区中的系统,即最小Linux系统。

在串口终端输入命令“fastboot”,可以看到原先的“system”和“userdata”分区名称已经被修改为“system_qte”和“system_linux”,如下图所示。

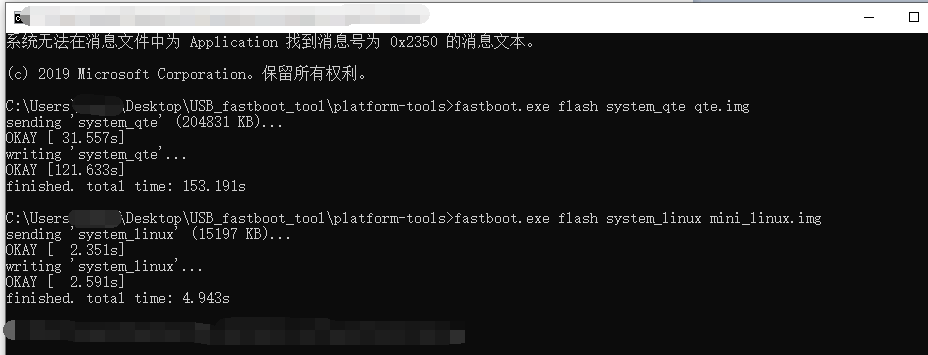
(2) 用fastboot工具把两个系统分别烧写进各自的分区中,如下图所示。
(3) 重启开发板(不要进入uboot模式),可以看到开发板进入到了最小Linux系统。
在串口终端输入命令“echo "qte" > /dev/mmcblk0p4”,该命令表示向mmcblk0p4分区的起始位置写入字符串“qte”

然后重启开发板,可以看到开发板进入到了Qt/E系统。
再在串口终端输入命令““echo "lin" > /dev/mmcblk0p4””,该命令表示向mmcblk0p4分区的起始位置写入字符串“lin”
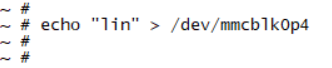
重启开发板,可以看到开发板又回到了最小Linux系统。
双系统引导成功!
ARM开发板实现双系统引导的一种方法——基于迅为iTOP-4412开发板的更多相关文章
- Win7&Ubuntu12.04 双系统引导问题
周末的时候手贱,重装系统,导致原来的ubuntu12.04和win7双系统的引导不见了,所以在此进行一下说明,如何修复. 1. win7和ubuntu12.04双系统引导修复 问题描述: 在重装 ...
- win10 + Ubuntu 20.04 LTS 双系统 引导界面美化
版权声明:本文为CSDN博主「ZChen1996」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明. 原文链接:https://blog.csdn.net/ZChen1 ...
- Win7与Ubuntu双系统时卸载Ubuntu的方法
Win7与Ubuntu双系统时卸载Ubuntu的方法 [日期:2010-03-26] 来源:Ubuntu社区 作者:Ubuntu编辑 [字体:大 中 小] 1. 下载MBRFix工具,放 ...
- 双系统中ubuntu的安装方法
双系统中ubuntu的安装方法 注意:给电脑安装双系统时,一定要先装Windows系统,再安装Linux系统! 原因是电脑开机后,要先执行一段bootloader引导程序:再由引导程序启动操作系统.W ...
- C# Windows Phone 8 WP8 开发,取得手机萤幕大小两种方法。
原文:C# Windows Phone 8 WP8 开发,取得手机萤幕大小两种方法. 一般我们在开发Windows Phone App时,需要取得萤幕的大小来自定义最佳化控制项的大小,但是开如何取得萤 ...
- centos7 ,windows7 grub2 双系统引导
因为原先的windows7 和 centos6.3 安装在一台笔记本上.因为centos6.3不能识别无线网卡,在网上找了找,要升级内核到3.2以上. 因为本人初级水平,不敢擅自行动,怕把window ...
- Linux/Windows双系统引导修复
安装双系统建议先安装windows,然后在安装Linux,使用Linux(grub2)引导双系统 如果重新安装了windows,则无法引导进入linux,需要修复引导 在windows下安装easyB ...
- CentOS7与Win7双系统引导问题
先安装的Win7,后安装的CentOS7,结果系统引导就只有CentOS7了.记得以前CentOS6.x系列没这个问题,主要是由于CentOS7.x使用grub2的原因吧. 方案一:使用Win PE. ...
- 使用 boot-repair 对 Windows + Ubuntu 双系统引导修复
问题描述: 由于在windows上进行更新/重装/修改了引导设置以后,windows会“自私”地重写引导,导致Ubuntu系统引导消失而无法选择Ubuntu启动.
随机推荐
- Android中Activity启动模式探索
Android中启动模式(launchMode)分为standard, singleTop, singleTask, singleInstance四种,可通过AndroidManifest.xml文件 ...
- 构建自己的js库
一.背景 web前端开发人员经常会用到一些现成的js库(框架).框架的使用增加了代码的模块化和可复用性,最主要的是屏蔽了浏览器之间差异性的实现,使得代码更加简洁,框架使用者只需要将注意力放在业务的实现 ...
- [转] 总结了N个真实线上故障
以下文章来源于架构师进阶之路 ,作者二马读书 1. JVM频繁FULL GC快速排查 在分享此案例前,先聊聊哪些场景会导致频繁Full GC: 内存泄漏(代码有问题,对象引用没及时释放,导致对象不能及 ...
- Spring 参数注入
一个(类)Bean可能包含多种属性,这些属性怎么配置??? 见下: 用People Dog Cat Tiger Panda五个类来学习一些常用的=_= 重点在XML <!--基本类型注入- ...
- .Net Core下基于Emit的打造AOP
之前的基于DispatchProxy的AOP组件,实现了属性注入,但是这个依旧有很多限制 比如不支持构造器注入,继承DispatchProxy的子类必须是公开类 个人有点代码洁癖,不喜欢这种不能控制的 ...
- 改变对象的字符串显示__str__repr
改变对象的字符串显示 # l=list('hello') # # print(l) # file=open('test.txt','w') # print(file) class Foo: def _ ...
- Android 给服务器发送网络请求
今天听得有点蒙,因为服务器的问题,这边建立服务器的话,学长用的是Idea建立的Spring之类的方法去搞服务器. 然后就是用Android去给这个服务器发送请求,大致效果还是懂的,就是像网站发送请求, ...
- 使用QT实现一个简单的登陆对话框(纯代码实现C++)
使用QT实现一个简单的登陆对话框(纯代码实现C++) 效果展示 使用的QT控件 控件 描述 QLable 标签 QLineEdit 行文本框 QPushButton 按扭 QHBoxLayout 水平 ...
- 对象原型之__proto__
对象都会有一个__proto__指向构造函数的prototype原型对象,对象之所以能够使用构造函数的prototype原型对象的方法,就是因为有__proto__原型的存在. funct ...
- BIGI行情http请求实时行情数据方式
BIGI行情http请求实时行情数据方式 新浪财经文华财经并非实时行情数据源,所以获取的行情数据源也并非实时的.以下介绍的方法和新浪财经获取行情数据源的方法是一致的.需要实时行情数据源可以向BIGI行 ...