韦东山freeRTOS系列教程之【第十章】软件定时器(software timer)
需要获取更好阅读体验的同学,请访问我专门设立的站点查看,地址:http://rtos.100ask.net/
系列教程总目录
本教程连载中,篇章会比较多,为方便同学们阅读,点击这里可以查看文章的 目录列表,目录列表页面地址:https://blog.csdn.net/thisway_diy/article/details/121399484
概述
软件定时器就是"闹钟",你可以设置闹钟,
在30分钟后让你起床工作
每隔1小时让你例行检查机器运行情况
软件定时器也可以完成两类事情:
- 在"未来"某个时间点,运行函数
- 周期性地运行函数
日常生活中我们可以定无数个"闹钟",这无数的"闹钟"要基于一个真实的闹钟。
在FreeRTOS里,我们也可以设置无数个"软件定时器",它们都是基于系统滴答中断(Tick Interrupt)。
本章涉及如下内容:
- 软件定时器的特性
- Daemon Task
- 定时器命令队列
- 一次性定时器、周期性定时器的差别
- 怎么操作定时器:创建、启动、复位、修改周期
10.1 软件定时器的特性
我们在手机上添加闹钟时,需要指定时间、指定类型(一次性的,还是周期性的)、指定做什么事;还有一些过时的、不再使用的闹钟。如下图所示:

使用定时器跟使用手机闹钟是类似的:
- 指定时间:启动定时器和运行回调函数,两者的间隔被称为定时器的周期(period)。
- 指定类型,定时器有两种类型:
- 一次性(One-shot timers):
这类定时器启动后,它的回调函数只会被调用一次;
可以手工再次启动它,但是不会自动启动它。 - 自动加载定时器(Auto-reload timers ):
这类定时器启动后,时间到之后它会自动启动它;
这使得回调函数被周期性地调用。
- 一次性(One-shot timers):
- 指定要做什么事,就是指定回调函数
实际的闹钟分为:有效、无效两类。软件定时器也是类似的,它由两种状态:
- 运行(Running、Active):运行态的定时器,当指定时间到达之后,它的回调函数会被调用
- 冬眠(Dormant):冬眠态的定时器还可以通过句柄来访问它,但是它不再运行,它的回调函数不会被调用
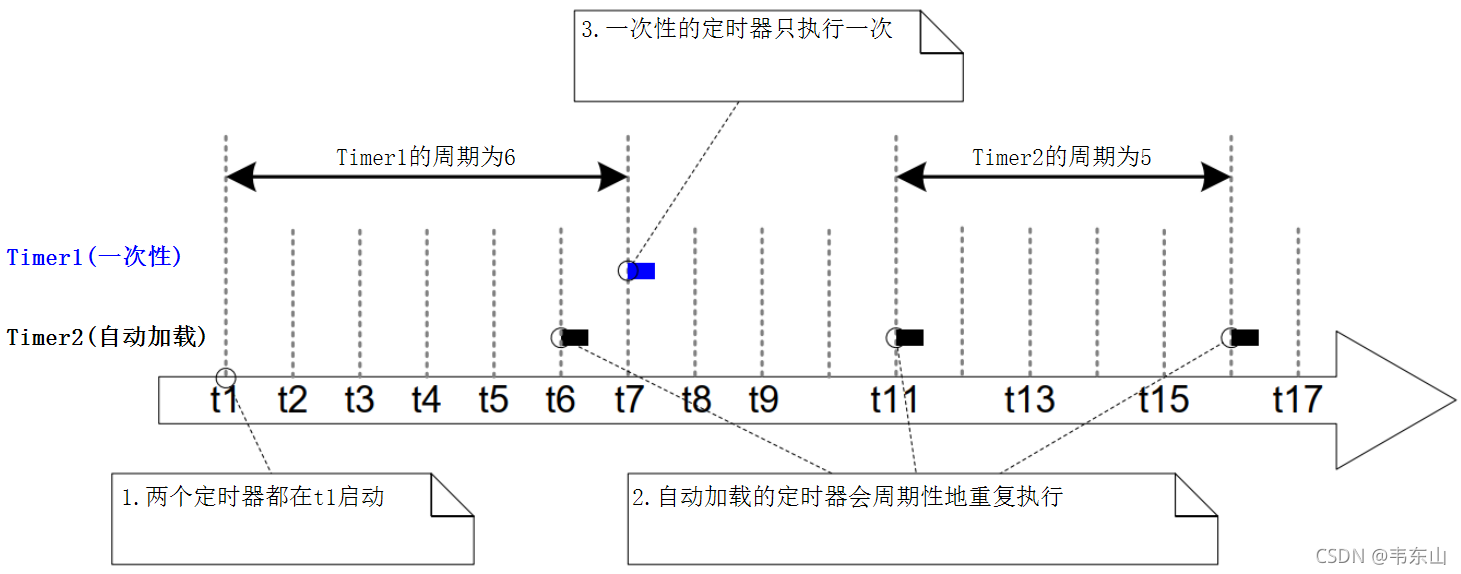
定时器运行情况示例如下:
- Timer1:它是一次性的定时器,在t1启动,周期是6个Tick。经过6个tick后,在t7执行回调函数。它的回调函数只会被执行一次,然后该定时器进入冬眠状态。
- Timer2:它是自动加载的定时器,在t1启动,周期是5个Tick。每经过5个tick它的回调函数都被执行,比如在t6、t11、t16都会执行。
10.2 软件定时器的上下文
10.2.1 守护任务
要理解软件定时器API函数的参数,特别是里面的xTicksToWait,需要知道定时器执行的过程。
FreeRTOS中有一个Tick中断,软件定时器基于Tick来运行。在哪里执行定时器函数?第一印象就是在Tick中断里执行:
- 在Tick中断中判断定时器是否超时
- 如果超时了,调用它的回调函数
FreeRTOS是RTOS,它不允许在内核、在中断中执行不确定的代码:如果定时器函数很耗时,会影响整个系统。
所以,FreeRTOS中,不在Tick中断中执行定时器函数。
在哪里执行?在某个任务里执行,这个任务就是:RTOS Damemon Task,RTOS守护任务。以前被称为"Timer server",但是这个任务要做并不仅仅是定时器相关,所以改名为:RTOS Damemon Task。
当FreeRTOS的配置项configUSE_TIMERS被设置为1时,在启动调度器时,会自动创建RTOS Damemon Task。
我们自己编写的任务函数要使用定时器时,是通过"定时器命令队列"(timer command queue)和守护任务交互,如下图所示:
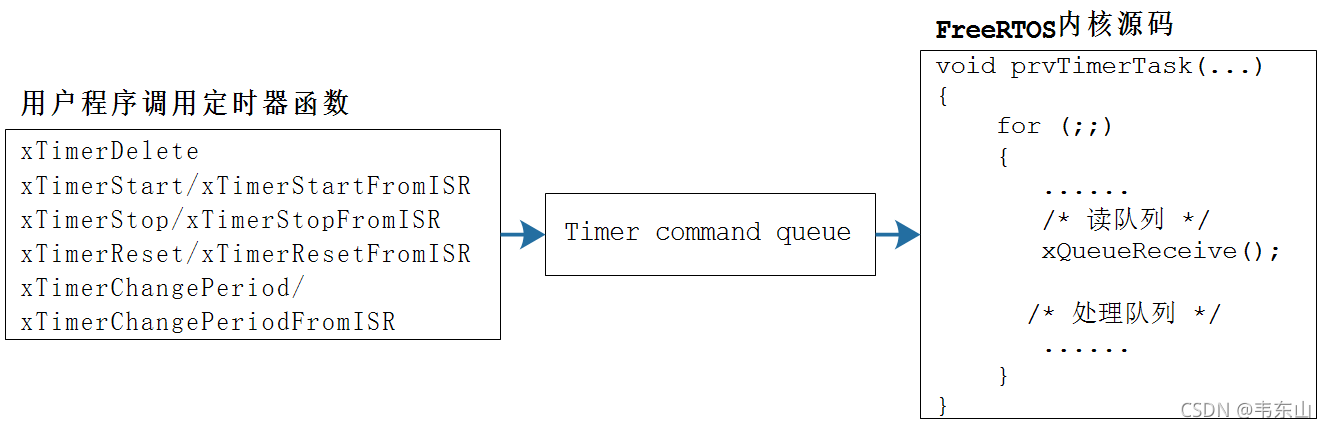
守护任务的优先级为:configTIMER_TASK_PRIORITY;定时器命令队列的长度为configTIMER_QUEUE_LENGTH。
10.2.2 守护任务的调度
守护任务的调度,跟普通的任务并无差别。当守护任务是当前优先级最高的就绪态任务时,它就可以运行。它的工作有两类:
- 处理命令:从命令队列里取出命令、处理
- 执行定时器的回调函数
能否及时处理定时器的命令、能否及时执行定时器的回调函数,严重依赖于守护任务的优先级。下面使用2个例子来演示。
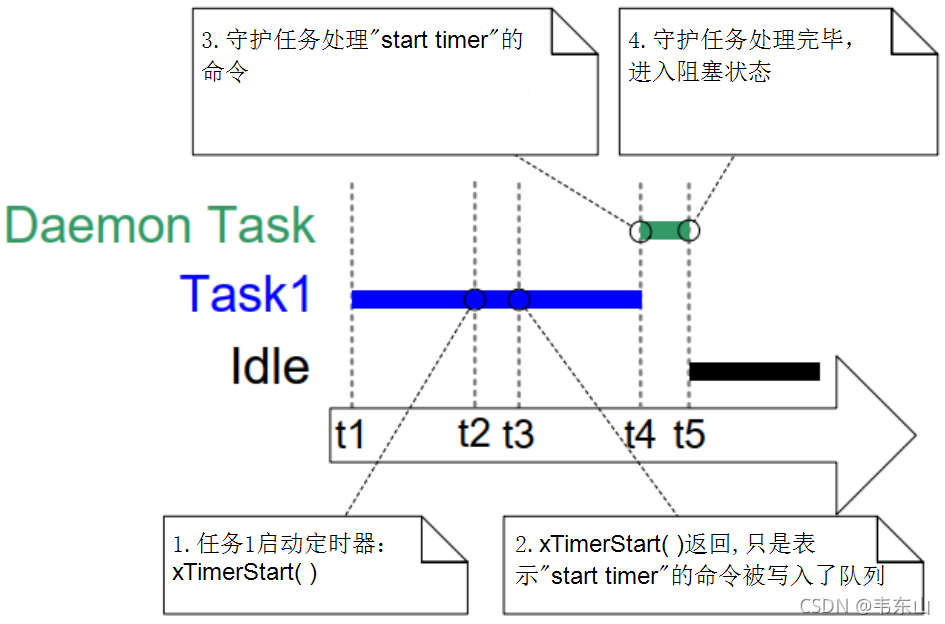
例子1:守护任务的优先性级较低
t1:Task1处于运行态,守护任务处于阻塞态。
守护任务在这两种情况下会退出阻塞态切换为就绪态:命令队列中有数据、某个定时器超时了。
至于守护任务能否马上执行,取决于它的优先级。t2:Task1调用
xTimerStart()
要注意的是,xTimerStart()只是把"start timer"的命令发给"定时器命令队列",使得守护任务退出阻塞态。
在本例中,Task1的优先级高于守护任务,所以守护任务无法抢占Task1。t3:Task1执行完
xTimerStart()
但是定时器的启动工作由守护任务来实现,所以xTimerStart()返回并不表示定时器已经被启动了。t4:Task1由于某些原因进入阻塞态,现在轮到守护任务运行。
守护任务从队列中取出"start timer"命令,启动定时器。t5:守护任务处理完队列中所有的命令,再次进入阻塞态。Idel任务时优先级最高的就绪态任务,它执行。
注意:假设定时器在后续某个时刻tX超时了,超时时间是"tX-t2",而非"tX-t4",从
xTimerStart()函数被调用时算起。
例子2:守护任务的优先性级较高
t1:Task1处于运行态,守护任务处于阻塞态。
守护任务在这两种情况下会退出阻塞态切换为就绪态:命令队列中有数据、某个定时器超时了。
至于守护任务能否马上执行,取决于它的优先级。t2:Task1调用
xTimerStart()
要注意的是,xTimerStart()只是把"start timer"的命令发给"定时器命令队列",使得守护任务退出阻塞态。
在本例中,守护任务的优先级高于Task1,所以守护任务抢占Task1,守护任务开始处理命令队列。
Task1在执行xTimerStart()的过程中被抢占,这时它无法完成此函数。t3:守护任务处理完命令队列中所有的命令,再次进入阻塞态。
此时Task1是优先级最高的就绪态任务,它开始执行。t4:Task1之前被守护任务抢占,对
xTimerStart()的调用尚未返回。现在开始继续运行次函数、返回。t5:Task1由于某些原因进入阻塞态,进入阻塞态。Idel任务时优先级最高的就绪态任务,它执行。
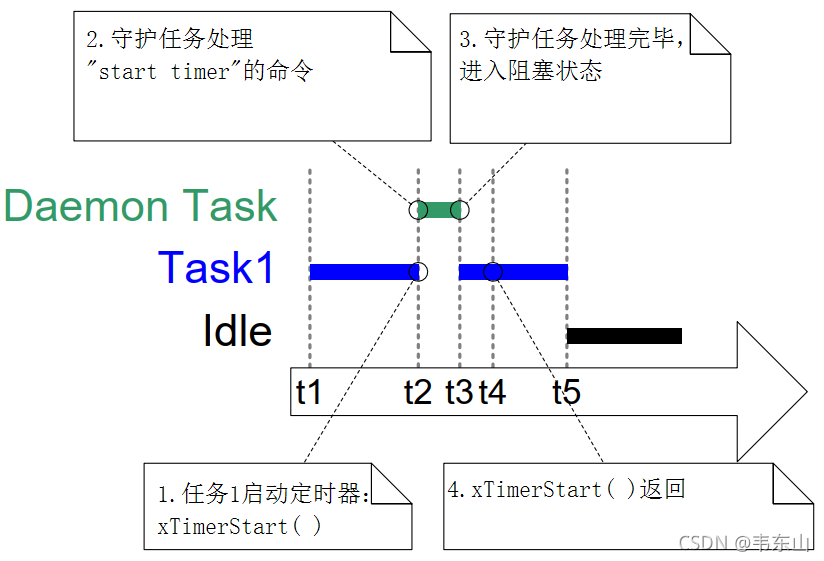
注意,定时器的超时时间是基于调用xTimerStart()的时刻tX,而不是基于守护任务处理命令的时刻tY。假设超时时间是10个Tick,超时时间是"tX+10",而非"tY+10"。
10.2.3 回调函数
定时器的回调函数的原型如下:
void ATimerCallback( TimerHandle_t xTimer );
定时器的回调函数是在守护任务中被调用的,守护任务不是专为某个定时器服务的,它还要处理其他定时器。
所以,定时器的回调函数不要影响其他人:
回调函数要尽快实行,不能进入阻塞状态
不要调用会导致阻塞的API函数,比如
vTaskDelay()可以调用
xQueueReceive()之类的函数,但是超时时间要设为0:即刻返回,不可阻塞
10.3 软件定时器的函数
根据定时器的状态转换图,就可以知道所涉及的函数:
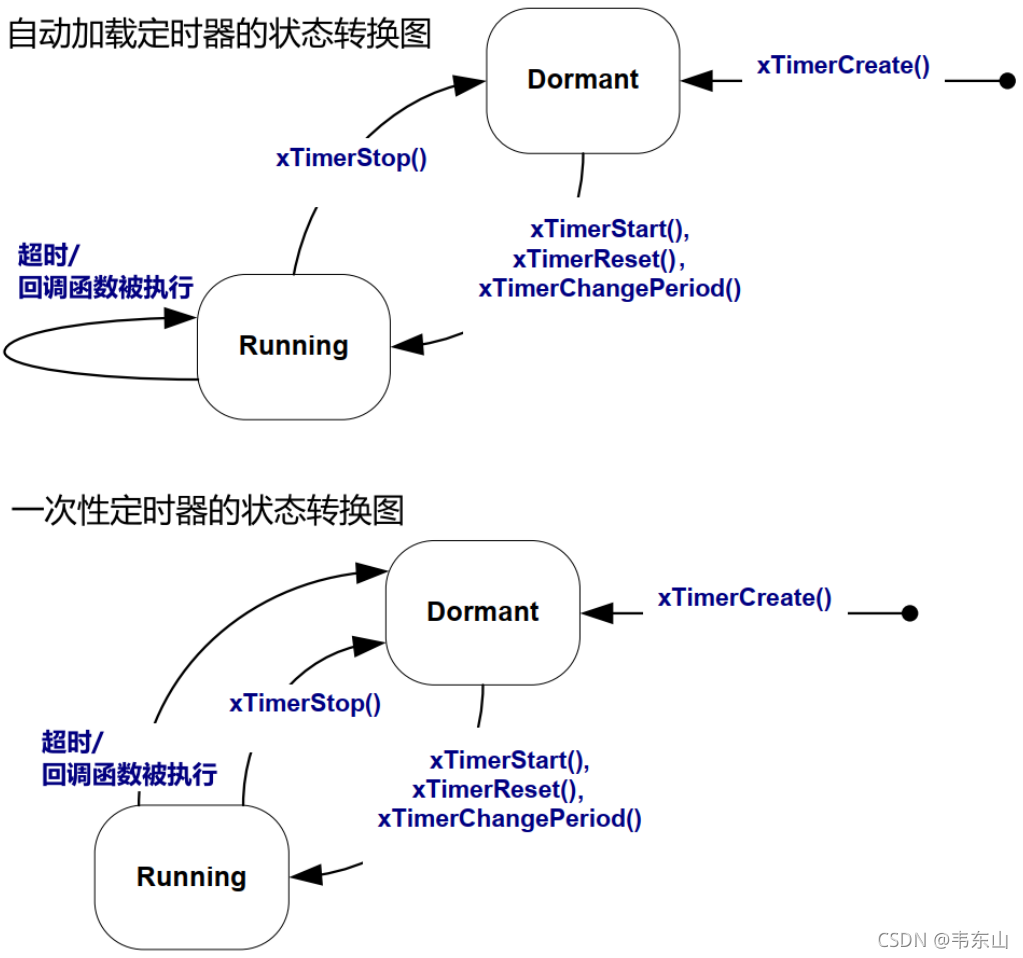
10.3.1 创建
要使用定时器,需要先创建它,得到它的句柄。
有两种方法创建定时器:动态分配内存、静态分配内存。函数原型如下:
/* 使用动态分配内存的方法创建定时器
* pcTimerName:定时器名字, 用处不大, 尽在调试时用到
* xTimerPeriodInTicks: 周期, 以Tick为单位
* uxAutoReload: 类型, pdTRUE表示自动加载, pdFALSE表示一次性
* pvTimerID: 回调函数可以使用此参数, 比如分辨是哪个定时器
* pxCallbackFunction: 回调函数
* 返回值: 成功则返回TimerHandle_t, 否则返回NULL
*/
TimerHandle_t xTimerCreate( const char * const pcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction );
/* 使用静态分配内存的方法创建定时器
* pcTimerName:定时器名字, 用处不大, 尽在调试时用到
* xTimerPeriodInTicks: 周期, 以Tick为单位
* uxAutoReload: 类型, pdTRUE表示自动加载, pdFALSE表示一次性
* pvTimerID: 回调函数可以使用此参数, 比如分辨是哪个定时器
* pxCallbackFunction: 回调函数
* pxTimerBuffer: 传入一个StaticTimer_t结构体, 将在上面构造定时器
* 返回值: 成功则返回TimerHandle_t, 否则返回NULL
*/
TimerHandle_t xTimerCreateStatic(const char * const pcTimerName,
TickType_t xTimerPeriodInTicks,
UBaseType_t uxAutoReload,
void * pvTimerID,
TimerCallbackFunction_t pxCallbackFunction,
StaticTimer_t *pxTimerBuffer );
回调函数的类型是:
void ATimerCallback( TimerHandle_t xTimer );
typedef void (* TimerCallbackFunction_t)( TimerHandle_t xTimer );
10.3.2 删除
动态分配的定时器,不再需要时可以删除掉以回收内存。删除函数原型如下:
/* 删除定时器
* xTimer: 要删除哪个定时器
* xTicksToWait: 超时时间
* 返回值: pdFAIL表示"删除命令"在xTicksToWait个Tick内无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerDelete( TimerHandle_t xTimer, TickType_t xTicksToWait );
定时器的很多API函数,都是通过发送"命令"到命令队列,由守护任务来实现。
如果队列满了,"命令"就无法即刻写入队列。我们可以指定一个超时时间xTicksToWait,等待一会。
10.3.3 启动/停止
启动定时器就是设置它的状态为运行态(Running、Active)。
停止定时器就是设置它的状态为冬眠(Dormant),让它不能运行。
涉及的函数原型如下:
/* 启动定时器
* xTimer: 哪个定时器
* xTicksToWait: 超时时间
* 返回值: pdFAIL表示"启动命令"在xTicksToWait个Tick内无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerStart( TimerHandle_t xTimer, TickType_t xTicksToWait );
/* 启动定时器(ISR版本)
* xTimer: 哪个定时器
* pxHigherPriorityTaskWoken: 向队列发出命令使得守护任务被唤醒,
* 如果守护任务的优先级比当前任务的高,
* 则"*pxHigherPriorityTaskWoken = pdTRUE",
* 表示需要进行任务调度
* 返回值: pdFAIL表示"启动命令"无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerStartFromISR( TimerHandle_t xTimer,
BaseType_t *pxHigherPriorityTaskWoken );
/* 停止定时器
* xTimer: 哪个定时器
* xTicksToWait: 超时时间
* 返回值: pdFAIL表示"停止命令"在xTicksToWait个Tick内无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerStop( TimerHandle_t xTimer, TickType_t xTicksToWait );
/* 停止定时器(ISR版本)
* xTimer: 哪个定时器
* pxHigherPriorityTaskWoken: 向队列发出命令使得守护任务被唤醒,
* 如果守护任务的优先级比当前任务的高,
* 则"*pxHigherPriorityTaskWoken = pdTRUE",
* 表示需要进行任务调度
* 返回值: pdFAIL表示"停止命令"无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerStopFromISR( TimerHandle_t xTimer,
BaseType_t *pxHigherPriorityTaskWoken );
注意,这些函数的xTicksToWait表示的是,把命令写入命令队列的超时时间。命令队列可能已经满了,无法马上把命令写入队列里,可以等待一会。
xTicksToWait不是定时器本身的超时时间,不是定时器本身的"周期"。
创建定时器时,设置了它的周期(period)。xTimerStart()函数是用来启动定时器。假设调用xTimerStart()的时刻是tX,定时器的周期是n,那么在tX+n时刻定时器的回调函数被调用。
如果定时器已经被启动,但是它的函数尚未被执行,再次执行xTimerStart()函数相当于执行xTimerReset(),重新设定它的启动时间。
10.3.4 复位
从定时器的状态转换图可以知道,使用xTimerReset()函数可以让定时器的状态从冬眠态转换为运行态,相当于使用xTimerStart()函数。
如果定时器已经处于运行态,使用xTimerReset()函数就相当于重新确定超时时间。假设调用xTimerReset()的时刻是tX,定时器的周期是n,那么tX+n就是重新确定的超时时间。
复位函数的原型如下:
/* 复位定时器
* xTimer: 哪个定时器
* xTicksToWait: 超时时间
* 返回值: pdFAIL表示"复位命令"在xTicksToWait个Tick内无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerReset( TimerHandle_t xTimer, TickType_t xTicksToWait );
/* 复位定时器(ISR版本)
* xTimer: 哪个定时器
* pxHigherPriorityTaskWoken: 向队列发出命令使得守护任务被唤醒,
* 如果守护任务的优先级比当前任务的高,
* 则"*pxHigherPriorityTaskWoken = pdTRUE",
* 表示需要进行任务调度
* 返回值: pdFAIL表示"停止命令"无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerResetFromISR( TimerHandle_t xTimer,
BaseType_t *pxHigherPriorityTaskWoken );
10.3.5 修改周期
从定时器的状态转换图可以知道,使用xTimerChangePeriod()函数,处理能修改它的周期外,还可以让定时器的状态从冬眠态转换为运行态。
修改定时器的周期时,会使用新的周期重新计算它的超时时间。假设调用xTimerChangePeriod()函数的时间tX,新的周期是n,则tX+n就是新的超时时间。
相关函数的原型如下:
/* 修改定时器的周期
* xTimer: 哪个定时器
* xNewPeriod: 新周期
* xTicksToWait: 超时时间, 命令写入队列的超时时间
* 返回值: pdFAIL表示"修改周期命令"在xTicksToWait个Tick内无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerChangePeriod( TimerHandle_t xTimer,
TickType_t xNewPeriod,
TickType_t xTicksToWait );
/* 修改定时器的周期
* xTimer: 哪个定时器
* xNewPeriod: 新周期
* pxHigherPriorityTaskWoken: 向队列发出命令使得守护任务被唤醒,
* 如果守护任务的优先级比当前任务的高,
* 则"*pxHigherPriorityTaskWoken = pdTRUE",
* 表示需要进行任务调度
* 返回值: pdFAIL表示"修改周期命令"在xTicksToWait个Tick内无法写入队列
* pdPASS表示成功
*/
BaseType_t xTimerChangePeriodFromISR( TimerHandle_t xTimer,
TickType_t xNewPeriod,
BaseType_t *pxHigherPriorityTaskWoken );
10.3.6 定时器ID
定时器的结构体如下,里面有一项pvTimerID,它就是定时器ID:
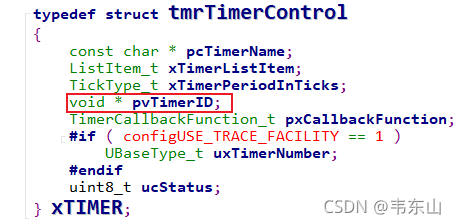
怎么使用定时器ID,完全由程序来决定:
- 可以用来标记定时器,表示自己是什么定时器
- 可以用来保存参数,给回调函数使用
它的初始值在创建定时器时由xTimerCreate()这类函数传入,后续可以使用这些函数来操作:
- 更新ID:使用
vTimerSetTimerID()函数 - 查询ID:查询
pvTimerGetTimerID()函数
这两个函数不涉及命令队列,它们是直接操作定时器结构体。
函数原型如下:
/* 获得定时器的ID
* xTimer: 哪个定时器
* 返回值: 定时器的ID
*/
void *pvTimerGetTimerID( TimerHandle_t xTimer );
/* 设置定时器的ID
* xTimer: 哪个定时器
* pvNewID: 新ID
* 返回值: 无
*/
void vTimerSetTimerID( TimerHandle_t xTimer, void *pvNewID );
10.4 示例24: 一般使用
本节程序为FreeRTOS_24_software_timer。
要使用定时器,需要做些准备工作:
/* 1. 工程中 */
添加 timer.c
/* 2. 配置文件FreeRTOSConfig.h中 */
#define configUSE_TIMERS 1 /* 使能定时器 */
#define configTIMER_TASK_PRIORITY 31 /* 守护任务的优先级, 尽可能高一些 */
#define configTIMER_QUEUE_LENGTH 5 /* 命令队列长度 */
#define configTIMER_TASK_STACK_DEPTH 32 /* 守护任务的栈大小 */
/* 3. 源码中 */
#include "timers.h"
main函数中创建、启动了2个定时器:一次性的、周期
static volatile uint8_t flagONEShotTimerRun = 0;
static volatile uint8_t flagAutoLoadTimerRun = 0;
static void vONEShotTimerFunc( TimerHandle_t xTimer );
static void vAutoLoadTimerFunc( TimerHandle_t xTimer );
/*-----------------------------------------------------------*/
#define mainONE_SHOT_TIMER_PERIOD pdMS_TO_TICKS( 10 )
#define mainAUTO_RELOAD_TIMER_PERIOD pdMS_TO_TICKS( 20 )
int main( void )
{
TimerHandle_t xOneShotTimer;
TimerHandle_t xAutoReloadTimer;
prvSetupHardware();
xOneShotTimer = xTimerCreate(
"OneShot", /* 名字, 不重要 */
mainONE_SHOT_TIMER_PERIOD, /* 周期 */
pdFALSE, /* 一次性 */
0, /* ID */
vONEShotTimerFunc /* 回调函数 */
);
xAutoReloadTimer = xTimerCreate(
"AutoReload", /* 名字, 不重要 */
mainAUTO_RELOAD_TIMER_PERIOD, /* 周期 */
pdTRUE, /* 自动加载 */
0, /* ID */
vAutoLoadTimerFunc /* 回调函数 */
);
if (xOneShotTimer && xAutoReloadTimer)
{
/* 启动定时器 */
xTimerStart(xOneShotTimer, 0);
xTimerStart(xAutoReloadTimer, 0);
/* 启动调度器 */
vTaskStartScheduler();
}
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
这两个定时器的回调函数比较简单:
static void vONEShotTimerFunc( TimerHandle_t xTimer )
{
static int cnt = 0;
flagONEShotTimerRun = !flagONEShotTimerRun;
printf("run vONEShotTimerFunc %d\r\n", cnt++);
}
static void vAutoLoadTimerFunc( TimerHandle_t xTimer )
{
static int cnt = 0;
flagAutoLoadTimerRun = !flagAutoLoadTimerRun;
printf("run vAutoLoadTimerFunc %d\r\n", cnt++);
}
逻辑分析仪如下图所示:
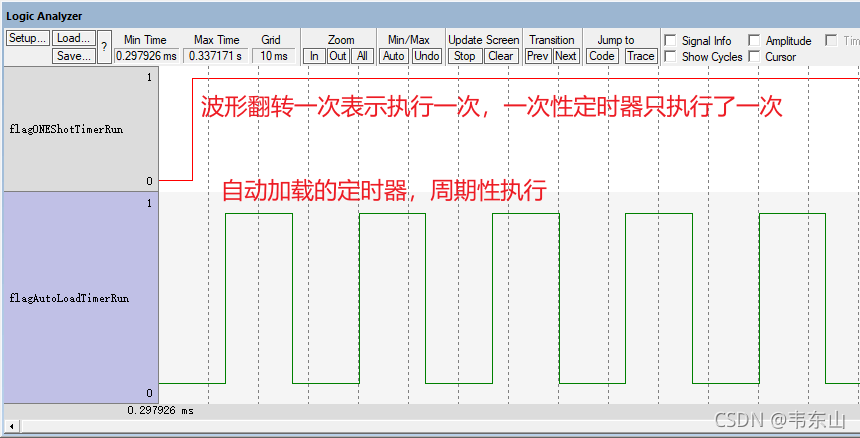
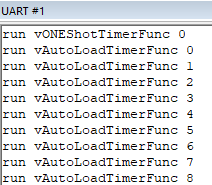
运行结果如下图所示:
10.5 示例25: 消除抖动
本节程序为FreeRTOS_25_software_timer_readkey。
在嵌入式开发中,我们使用机械开关时经常碰到抖动问题:引脚电平在短时间内反复变化。
怎么读到确定的按键状态?
- 连续读很多次,知道数值稳定:浪费CPU资源
- 使用定时器:要结合中断来使用
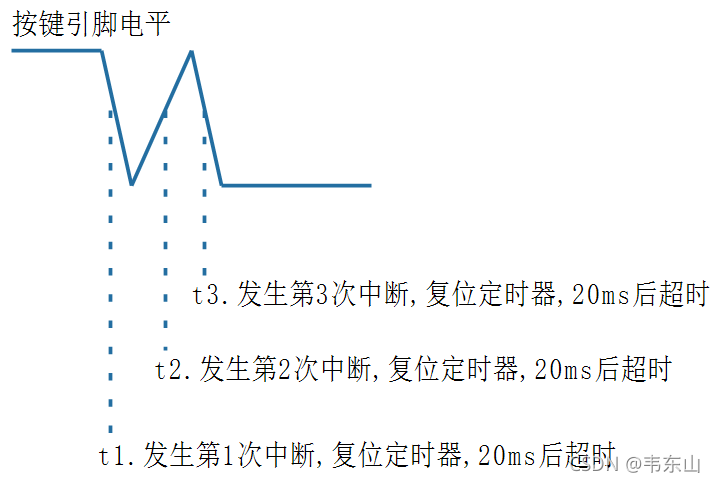
对于第2种方法,处理方法如下图所示,按下按键后:
- 在t1产生中断,这时不马上确定按键,而是复位定时器,假设周期时20ms,超时时间为"t1+20ms"
- 由于抖动,在t2再次产生中断,再次复位定时器,超时时间变为"t2+20ms"
- 由于抖动,在t3再次产生中断,再次复位定时器,超时时间变为"t3+20ms"
- 在"t3+20ms"处,按键已经稳定,读取按键值
main函数中创建了一个一次性的定时器,从来处理抖动;创建了一个任务,用来模拟产生抖动。代码如下:
/*-----------------------------------------------------------*/
static void vKeyFilteringTimerFunc( TimerHandle_t xTimer );
void vEmulateKeyTask( void *pvParameters );
static TimerHandle_t xKeyFilteringTimer;
/*-----------------------------------------------------------*/
#define KEY_FILTERING_PERIOD pdMS_TO_TICKS( 20 )
int main( void )
{
prvSetupHardware();
xKeyFilteringTimer = xTimerCreate(
"KeyFiltering", /* 名字, 不重要 */
KEY_FILTERING_PERIOD, /* 周期 */
pdFALSE, /* 一次性 */
0, /* ID */
vKeyFilteringTimerFunc /* 回调函数 */
);
/* 在这个任务中多次调用xTimerReset来模拟按键抖动 */
xTaskCreate( vEmulateKeyTask, "EmulateKey", 1000, NULL, 1, NULL );
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
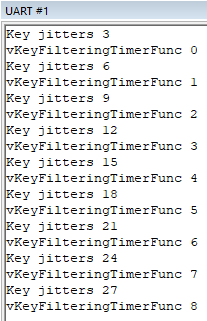
模拟产生按键:每个循环里调用3次xTimerReset,代码如下:
void vEmulateKeyTask( void *pvParameters )
{
int cnt = 0;
const TickType_t xDelayTicks = pdMS_TO_TICKS( 200UL );
for( ;; )
{
/* 模拟按键抖动, 多次调用xTimerReset */
xTimerReset(xKeyFilteringTimer, 0); cnt++;
xTimerReset(xKeyFilteringTimer, 0); cnt++;
xTimerReset(xKeyFilteringTimer, 0); cnt++;
printf("Key jitters %d\r\n", cnt);
vTaskDelay(xDelayTicks);
}
}
定时器回调函数代码如下:
static void vKeyFilteringTimerFunc( TimerHandle_t xTimer )
{
static int cnt = 0;
printf("vKeyFilteringTimerFunc %d\r\n", cnt++);
}
在人户函数中多次调用xTimerReset,只触发1次定时器回调函数,运行结果如下图所示:
韦东山freeRTOS系列教程之【第十章】软件定时器(software timer)的更多相关文章
- 实战SpringCloud响应式微服务系列教程(第十章)响应式RESTful服务完整代码示例
本文为实战SpringCloud响应式微服务系列教程第十章,本章给出响应式RESTful服务完整代码示例.建议没有之前基础的童鞋,先看之前的章节,章节目录放在文末. 1.搭建响应式RESTful服务. ...
- 韦东山 嵌入式linux教程 笔记
@ 目录 资源链接 一.常用命令 二.shell 三.如何更改PATH? 四.路径 五.vi编辑器 六.进阶命令 七.NAT配置网络 (第2篇-P34) 八.开发板挂载 Ubuntu 的 NFS 目录 ...
- 韦东山linux学习之ubuntu 9.10 软件源 问题
跟着开发板视频学习,安装了ubuntu9.10,然而由于现在官方已经不再提供软件更新的服务,软件我一直安装不上,搞了两天终于解决了. 一.安装VMware,配置等等就不详细说了,安装好系统后,网能连上 ...
- Microsemi Libero系列教程(一)——Libero开发环境介绍、下载、安装与注册
前言 相比与Xilinx和Altera在国内的市场,Microsemi的FPGA在国内应用很少很少,网上几乎没有详细的教程,刚开始使用时,遇到了各种问题,自己也走了不少弯路.本系列教程以Libero ...
- C++系列教程
C++系列教程: 本人是一个高二狗C++小白,之前徘徊在Python和易语言等一些语言之间,这是我几天学习收获的结果,该教程是我自己搜集整理,再加上自己对C++的理解编写的,也是一个偏经验类型的,希望 ...
- 开发快平台(M302I小e开发板系列教程)
开发快平台(M302I小e开发板系列教程) 开发块平台ESP8266模块相关理解 一. M302I小e开发板源码注释,源码基于:v1.4.0.8-u34.zip 1. user_main.c /*** ...
- Keil(MDK-ARM)系列教程(五)_Configuration(Ⅰ)
推荐 分享一个大神的人工智能教程.零基础!通俗易懂!风趣幽默!还带黄段子!希望你也加入到人工智能的队伍中来! http://www.captainbed.net/strongerhuang Ⅰ.写在前 ...
- RHEL7-RHCE培训系列教程,让您零基础入门Linux运维
本教程是旨在帮助那些刚入门IT行业或计划从事IT行业的初学者(包括开发人员和运维人员,以及想要在Linux系统维护上提升自己的网络管理员),0基础入门Linux运维,完整学习完成本系列课程相当于培训机 ...
- Angular2入门系列教程7-HTTP(一)-使用Angular2自带的http进行网络请求
上一篇:Angular2入门系列教程6-路由(二)-使用多层级路由并在在路由中传递复杂参数 感觉这篇不是很好写,因为涉及到网络请求,如果采用真实的网络请求,这个例子大家拿到手估计还要自己写一个web ...
- Angular2入门系列教程6-路由(二)-使用多层级路由并在在路由中传递复杂参数
上一篇:Angular2入门系列教程5-路由(一)-使用简单的路由并在在路由中传递参数 之前介绍了简单的路由以及传参,这篇文章我们将要学习复杂一些的路由以及传递其他附加参数.一个好的路由系统可以使我们 ...
随机推荐
- golang计时器
timer 计时器 用于在指定的Duration类型时间后调用函数或计算表达式. 如果只是想指定时间之后执行,使用time.Sleep() 使用NewTimer(),可以返回的Timer类型在计时器到 ...
- GOLANG-配置nginx反向代理端口 配置域名
目录 配置/etc/nginx/nginx.conf文件 新建/etc/nginx/conf.d/doc.haimait.conf文件 重启nginx服务 解析自己的域名到服务器的公网ip 配置/et ...
- 在jeecg-boot中密码的使用
1.生成密码并入库保存 String id= SnowflakeIdUtil.nextValue();//生成id operatCompany.setId(id); String salt = oCo ...
- postgresql性能优化3:分区表
一.分区表产生的背景 随着使用时间的增加,数据库中的数据量也不断增加,因此数据库查询越来越慢. 加速数据库的方法很多,如添加特定的索引,将日志目录换到单独的磁盘分区,调整数据库引擎的参数等.这些方法都 ...
- 使用自定义lua解析管理器调用lua脚本中的table
[5] 使用自定义lua解析管理器调用table 访问数组类型的table CallLuaEntrance测试脚本中内容: //------------------------------------ ...
- 解决小程序uni-app echars层级过高问题
使用 force-use-old-canvas="false" 使用微信小程序的cover-view会有很多问题,并且不一定生效,只需要在canvas的标签内添加 force-us ...
- uni.request二次封装
点击查看代码 const baseUrl = 'https://your-api-base-url.com'; function getAuthToken() { // 获取token的逻辑,可能会从 ...
- Vue3 项目
创建 Vue3 项目的步骤如下: 安装 Node.js Vue3 需要依赖 Node.js 环境,因此需要先安装 Node.js.可以从官网下载 Node.js 的安装包并安装,也可以使用包管理器安装 ...
- 数据库中存储bool对象的数据,使用Bit和Integer有什么区别,性能上有多大的差异
在数据库中存储布尔(Boolean)值时,常见的两种选择是使用 BIT 类型或 INTEGER 类型.两者在存储.性能和使用上的区别如下: 1. BIT 类型 存储:BIT 类型专门用于存储布尔值.通 ...
- 【漏洞复现】金蝶OA-EAS系统 uploadLogo.action 任意文件上传漏洞(0day)
阅读须知 此文所提供的信息只为网络安全人员对自己所负责的网站.服务器等(包括但不限于)进行检测或维护参考,未经授权请勿利用文章中的技术资料对任何计算机系统进行入侵操作.利用此文所提供的 ...