立体视觉 StereoVision
双目相机
原理
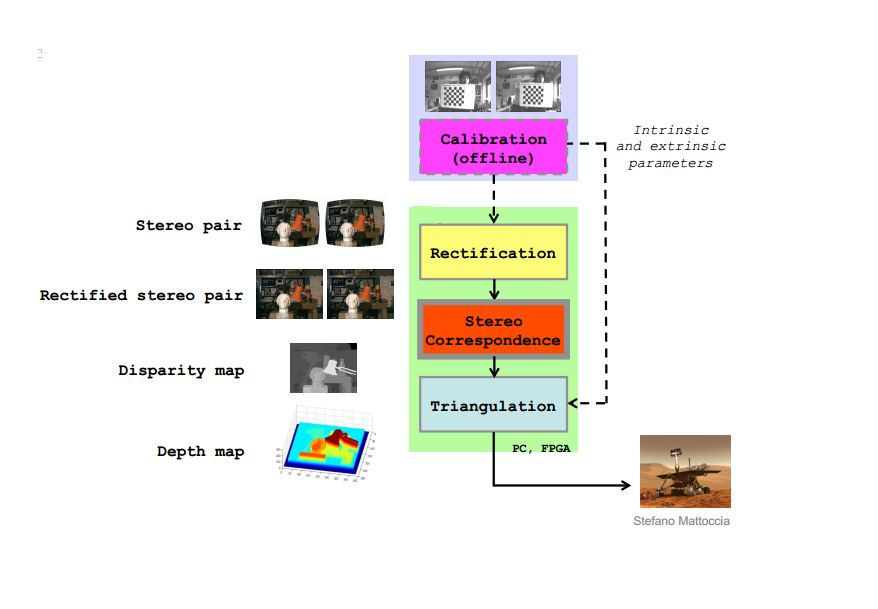
相机标定
图像校正
立体匹配
- 匹配代价计算(Matching Cost Computation:CC)
- 代价聚合(Cost Aggregation:CA)
- 视差计算(Disparity Computation )
- 视差精化(Disparity Refinement ):对上一步得到的粗估计的视差图进行精确计算,策略有很多,例如plane fitting,BP,动态规划等。这里不再熬述。
全局匹配算法得到的结果比较准确,但是其运行时间比较长,不适合实时运行。主要的算法有图割(graph cuts)、信念传播(belief propagation)、动态规划(Dynamic Programming )等算法。
局部匹配算法基本原理是给定在一幅图像上的某一点,选取该像素点邻域内的一个子窗口,在另一幅图像中的一个区域内,根据某种相似性判断依据,寻找与子窗口图像最为相似的子图,而其匹配的子图中对应的像素点就为该像素的匹配点。通常方法有SAD、SSD、NCC等等。
视差计算 Disparity map
深度计算 Depth map
多视角立体视觉 MVS
三维重建
链接:https://www.zhihu.com/question/53565660/answer/475141180
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
针对初学者
书籍I Computer Vision for Visual Effects
书籍II Computer Vision Algorithms and Applications
针对具备一定基础的同学
三维重建的每个基础模块挑选了 1-2 篇代表性文献,强烈建议阅读以下相关的原著文献, 这些文献是经过时间检验非常经典的文献,这将大大提升你们的科研和工程能力。 这些文章包括:
Sift 特征点检测
[1] Distinctive Image Features from Scale-Invariant Keypoints
增量 SFM
[2] Photo Tourism Exploring Photo Collections in 3D
[3] Structure-from-Motion Revisited
稠密匹配&&多视角立体视觉
[4] Multi-View Stereo for Community Photo Collections
表面重建
[5] Reconstruction and Representation of 3D Objects with Radial Basis
纹理贴图
[6] Let it be color! Large-Scale Texturing of 3D Reconstructions
相关网站
我们也提供一些相关的网站,这些网站是一些比较著名的开源系统。
MVE: https://www.gcc.tu-darmstadt.de/home/proj/mve/index.en.jsp
Bundler: http://www.cs.cornell.edu/~snavely/bundler/
VisualSFM: http://ccwu.me/vsfm/
OpenMVG: https://openmvg.readthedocs.io/en/latest/software/SfM/SfM/
ColMap: https://demuc.de/colmap/
相关的开源代码
https://github.com/colmap/colmap
https://github.com/simonfuhrmann/mve
Ref:
https://www.bilibili.com/video/BV1pk4y167eE 小亮
https://www.zhihu.com/question/53565660
SFM - Structure from Motion, 用一个移动的单目相机拍的照片可以得到深度信息,也可以用来做三维重建
SLAM - 同时定位和建图,和SFM解决同样的问题,只是强调了同时,就是实时性
Image Rectification - 图像矫正是通过分别对两张图片用单应(homography)矩阵变换(可以通过标定获得)得到的
Ref:
- 立体视觉算法汇总|单目、双目、多目
- 立体匹配算法原理与应用-奥比中光 讲了各种代价函数,E2E 各种网络
立体视觉 StereoVision的更多相关文章
- OpenCV+OpenGL 双目立体视觉三维重建
0.绪论 这篇文章主要为了研究双目立体视觉的最终目标--三维重建,系统的介绍了三维重建的整体步骤.双目立体视觉的整体流程包括:图像获取,摄像机标定,特征提取(稠密匹配中这一步可以省略),立体匹配,三维 ...
- 基于HALCON的双目立体视觉系统实现
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法.双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得 ...
- Cesium左右立体视觉续篇——遗留问题(渲染错误)以及临时替代方案
遗留问题详细说明 已解决部分 立体视觉中的视差: 横向渲染压缩. 遗留问题 1.左右分屏中的部分地图切片未渲染 问题描述:如下图(图片为解决问题后的图片),红色区域会显示黑色,无法正常显示影像.2.相 ...
- 在CesiumVR基础上实现3D左右立体视觉
整体思路 在VR模块的基础上调整视差,使其随距离发生变化: 左右分屏时,需要将左右屏的横向进行1/2压缩:这是因为3D-TV在对左右格式影像进行合并时,会进行拉伸: 左屏幕的相机相对于原来的(右屏)相 ...
- [OpenCV实战]49 对极几何与立体视觉初探
本文主要介绍对极几何(Epipolar Geometry)与立体视觉(Stereo Vision)的相关知识.对极几何简单点来说,其目的就是描述是两幅视图之间的内部对应关系,用来对立体视觉进行建模,实 ...
- 立体视觉-opencv中立体匹配相关代码
三种匹配算法比较 BM算法: 该算法代码: view plaincopy to clipboardprint? CvStereoBMState *BMState = cvCreateStereoBMS ...
- OpenCV stereo matching 代码 matlab实现视差显示
转载请注明出处:http://blog.csdn.net/wangyaninglm/article/details/44151213, 来自:shiter编写程序的艺术 基础知识 计算机视觉是一门研究 ...
- 【腾讯Bugly干货分享】WebVR如此近-three.js的WebVR示例解析
本文来自于腾讯bugly开发者社区,非经作者同意,请勿转载,原文地址:http://dev.qq.com/topic/57c7ff1689a6c9121b1adb16 作者:苏晏烨 关于WebVR 最 ...
- Atitit 图像处理类库大总结attilax qc20
Atitit 图像处理类库大总结attilax qc20 1.1. 选择与组合不同的图像处理类库1 1.2. Halcon 貌似商业工具,功能强大.1 1.3. Openvc Openvc功能也是比 ...
- VR系统的分类
转载请声明转载地址:http://www.cnblogs.com/Rodolfo/,违者必究. 根据用户参与和沉浸感的程度,通常把虚拟现实分为4大类:桌面虚拟现实系统.沉浸式虚拟现实系统.增强虚拟现实 ...
随机推荐
- UWP WinUI 制作一个路径矢量图标按钮样式入门
本文将告诉大家如何在 UWP 或 WinUI3 或 UNO 里,如何制作一个路径按钮.路径按钮就是使用几何路径轮廓表示内容的按钮,常见于各种图标按钮,或 svg 系贴图矢量图按钮 在网上有非常多矢量图 ...
- Linux Shell 常用命令 - 01篇
系列文章: Linux Shell 常用命令 - 02篇 0. 在线使用 Linux Shell 参考 https://www.sohu.com/a/343421845_298038 JS/UIX - ...
- LabVIEW之项目文件结构透析
代码的管理非常重要,LabVIEW本身自带很多代码管理工具.下面来剖析一个相对标准的小项目:
- 【原创软件】第2期:CAD文字快速批量替换工具CFR(CAD_FastReplace_V4)
01 背景 由于工作需要,开发了一套CAD文字快速批量替换软件CFR.主要目的是:实现dwg文件一次性完成单对/多对词组快速批量替换. 02 主要功能特色 (1)无需打开CAD,快速实现文字批量替换. ...
- Service Mesh Summit 回顾 | 轻舟服务网格的无侵入增强 Istio 经验
在云原生社区近日主办的 Service Mesh Summit 2022 服务网格峰会上,网易数帆云原生技术专家方志恒分享了轻舟服务网格无侵入增强 Istio 的经验,本文据此次分享整理,介绍了对无侵 ...
- 【游记】CSP 2023
day 0 和 printfmingren 整理了一下不会的知识点,发现有点多,遂开摆 音游真的太好玩了 对着<算法竞赛进阶指南>复习了下对拍器的写法,把部分算法的模板又打了一遍 感觉前途 ...
- JavaScript 监听组合按键
JavaScript监听组合按键 by:授客 QQ:1033553122 1. 思路 如图,通过监听并打印键盘keydown事件,得到图示内容,观察发现, 当按下的组合键包含Ctrl键时,ct ...
- 为什么我@Value中明明显示了值,他却是null
今天尝试把一些重要东西写入application.yml里,结果在使用的时候发现value取不出来值原因有2个: 1.没有写@compent,没有把这个类交给spring管理 2.在service层n ...
- leetcode2397. 被列覆盖的最多行数 回溯法/枝剪
第一次手搓一个回溯法,超时后采用枝剪勉强通过 class Solution { int max=0; int numSelect; public int maximumRows(int[][] mat ...
- 使用Nginx Proxy Manager配置Halo的反向代理和申请 SSL 证书
本文介绍Nginx Proxy Manager配置Halo的反向代理和申请 SSL 证书,如需要了解Halo 2的安装,参考如何在Linux云服务器上通过Docker Compose部署安装Halo, ...