Arduino101学习笔记(十三)—— 101六轴传感器
一、相关API
1、begin:需要在其他CUIREIMU前调用
//*********************************************************************************************
//函数名称:CurieImu.begin()
//输入参数:无
//函数返回:无
//函数功能:开六轴传感器,必须第一个调用
//*********************************************************************************************
CurieIMU.begin();
2、得到陀螺仪的采样频率
//*********************************************************************************************
//函数名称:CurieImu.getGyroRate()
//输入参数:无
//函数返回:25 50 100 200 400 800 1600 3200(Hz)
//函数功能:得到陀螺仪的采样频率
//*********************************************************************************************
CurieIMU.getGyroRate();
3、设置陀螺仪的采样频率
他的数据速率也是采样频率,并影响读数的带宽。
//*********************************************************************************************
//函数名称:CurieImu.setGyroRate(int rate)
//输入参数:rate 采样频率 25 50 100 200 400 800 1600 3200(Hz)
//函数返回:无
//函数功能:无
//*********************************************************************************************
CurieImu.setGyroRate(int rate);
4、得到加速度计的采样频率
//*********************************************************************************************
//函数名称:CurieImu.getAccelerometerRate()
//输入参数:无
//函数返回:rate 采样频率 12.5 25 50 100 200 400 800 1600
//函数功能:返回加速度计的采样频率
//*********************************************************************************************
CurieIMU.getAccelerometerRate()
5、设置加速度计的采样频率
//*********************************************************************************************
//函数名称:CurieImu.setAccelerometerRate(float rate)
//输入参数:rate 采样频率 12.5 25 50 100 200 400 800 1600
//函数返回:无
//函数功能:返回加速度计的采样频率
//*********************************************************************************************
CurieIMU.setAccelerometerRate(float rate)
6、返回陀螺仪测量范围
//*********************************************************************************************
//函数名称:CurieImu.getGyroRange()
//输入参数:无
//函数返回:2000 (+/-2000°/s)
// 1000 (+/-1000°/s)
// 500 (+/-500°/s)
// 250 (+/-250°/s)
// 125 (+/-125°/s)
//函数功能:返回陀螺仪的测量范围
//*********************************************************************************************
CurieIMU.getGyroRange()
7、设置陀螺仪测量范围
//*********************************************************************************************
//函数名称:CurieImu.setGyroRange()
//输入参数:2000 (+/-2000°/s)
// 1000 (+/-1000°/s)
// 500 (+/-500°/s)
// 250 (+/-250°/s)
// 125 (+/-125°/s)
//函数返回:无
//函数功能:返回陀螺仪的测量范围
//*********************************************************************************************
CurieIMU.setGyroRange()
8、得到加速度计的测量范围
//*********************************************************************************************
//函数名称:CurieImu.getAccelerometerRange()
//输入参数:无
//函数返回:2 (+/- 2g)
// 4 (+/- 4g)
// 8 (+/- 8g)
// 16 (+/- 16g)
//函数功能:返回陀螺仪的测量范围
//*********************************************************************************************
CurieIMU.getAccelerometerRange()
9、设置加速度计的测量范围
//*********************************************************************************************
//函数名称:CurieImu.setAccelerometerRange(int range)
//输入参数:2 (+/- 2g)
// 4 (+/- 4g)
// 8 (+/- 8g)
// 16 (+/- 16g)
//函数返回:无
//函数功能:返回陀螺仪的测量范围
//*********************************************************************************************
CurieIMU.setAccelerometerRange(int range)
10、自动进行陀螺仪偏移计算
//*********************************************************************************************
//函数名称:CurieImu.autoCalibrateGyroOffset()
//输入参数:无
//函数返回:无
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.autoCalibrateGyroOffset()
11、自动进行加速计偏移计算
//*********************************************************************************************
//函数名称:CurieImu.autoCalibrateAccelerometerOffset(int, axis, int target)
//输入参数:axis: X_AXIS
// Y_AXIS
// Z_AXIS
// target: it can be 0 or 1. 1表示要取消重力的影响,即平躺时Z轴应该写1
//函数返回:无
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.autoCalibrateAccelerometerOffset(int, axis, int target)
12、偏移修正开关
//关闭
CurieIMU.noGyroOffset();
CurieIMU.noAccelerometerOffset(); //打开
CurieIMU.gyroOffsetEnabled();
CurieIMU.accelerometerOffsetEnabled();
13、得到陀螺仪偏移修正的数值
//*********************************************************************************************
//函数名称:CurieImu.getGyroOffset(int axis)
//输入参数:axis: X_AXIS
// Y_AXIS
// Z_AXIS
//函数返回:修正的偏移值,The returned value is from -31.25 °/s to +31.25 °/s in discrete steps of 0.061 °/s.
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.getGyroOffset(int axis)
14、设置陀螺仪偏移
//*********************************************************************************************
//函数名称:CurieImu.setGyroOffset(int axis, int offset)
//输入参数:axis: X_AXIS
// Y_AXIS
// Z_AXIS
// offset 偏移
//函数返回:
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.setGyroOffset(int axis, int offset)
15、得到陀螺仪偏移
//*********************************************************************************************
//函数名称:CurieImu.getAccelerometerOffset(int axis)
//输入参数:axis: X_AXIS
// Y_AXIS
// Z_AXIS
//函数返回:
//函数功能:
//*********************************************************************************************
CurieIMU.getAccelerometerOffset(int axis)
16、设置陀螺仪偏移
//*********************************************************************************************
//函数名称:CurieImu.setAccelerometerOffset(int axis, int offset)
//输入参数:axis: X_AXIS
// Y_AXIS
// Z_AXIS
// offset 偏移
//函数返回:
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.setAccelerometerOffset(int axis, int offset)
17、得到检测阈值
//*********************************************************************************************
//函数名称:CurieImu.getDetectionThreshold(int feature)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_TAP
//函数返回:
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.getDetectionThreshold(int feature)
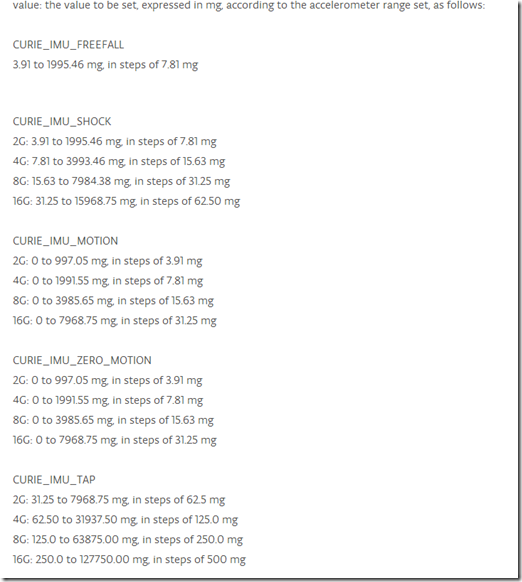
18、设置检测阈值
//*********************************************************************************************
//函数名称:CurieImu.setDetectionThreshold(int feature, float value)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_TAP
//函数返回:
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.setDetectionThreshold(int feature, float value)
19、得到检测的持续时间
//*********************************************************************************************
//函数名称:CurieImu.getDetectionDuration(int feature)
//输入参数:feature: the requested feature. It can assume one of these values:
- CURIE_IMU_TAP
- CURIE_IMU_TAP_QUIET
- CURIE_IMU_DOUBLE_TAP
- CURIE_IMU_ZERO_MOTION
//函数返回:
//函数功能:检测持续时间
//*********************************************************************************************
CurieIMU.getDetectionDuration(int feature)
20、设置检测的持续时间
//*********************************************************************************************
//函数名称:CurieImu.setDetectionDuration(int feature, float value)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_DOUBLE_TAP
// CURIE_IMU_TAP_SHOCK
// CURIE_IMU_TAP_QUIET P
//函数返回:
//函数功能:检测持续时间
//*********************************************************************************************
CurieIMU.setDetectionDuration(int feature, float value)
21、允许某个特征产生中断
//*********************************************************************************************
//函数名称:CurieImu.interrupts(int feature)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_STEP
// CURIE_IMU_TAP
// CURIE_IMU_TAP_SHOCK
// CURIE_IMU_TAP_QUIET
// CURIE_IMU_DOUBLE_TAP
//函数返回:
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.interrupts(int feature)
22、关闭某个特征产生中断
//*********************************************************************************************
//函数名称:CurieImu.noInterrupts(int feature)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_STEP
// CURIE_IMU_TAP
// CURIE_IMU_TAP_SHOCK
// CURIE_IMU_TAP_QUIET
// CURIE_IMU_DOUBLE_TAP
//函数返回:
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.noInterrupts(int feature)
23、返回某个特征是否开了中断
//*********************************************************************************************
//函数名称:CurieImu.interruptEnabled(int feature)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_STEP
// CURIE_IMU_TAP
// CURIE_IMU_TAP_SHOCK
// CURIE_IMU_TAP_QUIET
// CURIE_IMU_DOUBLE_TAP
//函数返回:TURE FALSE
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.interruptEnabled(int feature)
24、检测是否进入中断状态
//*********************************************************************************************
//函数名称:CurieImu.getInterruptStatus(int feature)
//输入参数:feature: the requested feature. It can assume one of these values:
// CURIE_IMU_FREEFALL
// CURIE_IMU_SHOCK
// CURIE_IMU_MOTION
// CURIE_IMU_ZERO_MOTION
// CURIE_IMU_STEP
// CURIE_IMU_TAP
// CURIE_IMU_TAP_SHOCK
// CURIE_IMU_TAP_QUIET
// CURIE_IMU_DOUBLE_TAP
//函数返回:TURE FALSE
//函数功能:进行陀螺仪偏移计算
//*********************************************************************************************
CurieIMU.getInterruptStatus(int feature)
25、返回步进检测模式的值
//*********************************************************************************************
//函数名称:CurieImu.getStepDetectionMode()
//输入参数:CURIE_IMU_STEP_MODE_NORMAL
// CURIE_IMU_STEP_MODE_SENSITIVE
// CURIE_IMU_STEP_MODE_ROBUST
// CURIE_IMU_STEP_MODE_UNKNOWN
//函数返回:TURE FALSE
//*********************************************************************************************
CurieIMU.getStepDetectionMode()
26、设置步进检测模式的值
//*********************************************************************************************
//函数名称:CurieImu.setStepDetectionMode(int mode)
//输入参数:CURIE_IMU_STEP_MODE_NORMAL
// CURIE_IMU_STEP_MODE_SENSITIVE
// CURIE_IMU_STEP_MODE_ROBUST
// CURIE_IMU_STEP_MODE_UNKNOWN
//函数返回:TURE FALSE
//*********************************************************************************************
CurieIMU.setStepDetectionMode(in mode)
27、读取6轴传感器的数值
//*********************************************************************************************
//函数名称:CurieImu.readMotionSensor(int ax, int ay, int az, int gx, int gy, int gz)
//输入参数:ax: a variable in which the accelerometer's value along x will be stored.
// ay: a variable in which the accelerometer's value along y will be stored.
// az: a variable in which the accelerometer's value along z will be stored.
// gx: a variable in which the gyro's value along x will be stored.
// gy: a variable in which the gyro's value along y will be stored.
// gz: a variable in which the gyro's value along z will be stored.
//函数返回:
//*********************************************************************************************
CurieIMU.readMotionSensor(int ax, int ay, int az, int gx, int gy, int gz)
28、读取加速度的数值
//*********************************************************************************************
//函数名称:CurieImu.readAccelerometer(int ax, int ay, int az)
//输入参数:ax: a variable in which the accelerometer's value along x will be stored.
// ay: a variable in which the accelerometer's value along y will be stored.
// az: a variable in which the accelerometer's value along z will be stored.
//函数返回:
//*********************************************************************************************
CurieIMU.readAccelerometer(int ax, int ay, int az)
29、读取陀螺仪的数值
//*********************************************************************************************
//函数名称:CurieImu.readGyro(int gx, int gy, int gz)
//输入参数:
// gx: a variable in which the gyro's value along x will be stored.
// gy: a variable in which the gyro's value along y will be stored.
// gz: a variable in which the gyro's value along z will be stored.
//函数返回:
//*********************************************************************************************
CurieIMU.readGyro(int gx, int gy, int gz)
30、读取温度值
//*********************************************************************************************
//函数名称:CurieImu.readTemperature()
//输入参数:
//函数返回:Celsius=(raw/32767.0)+23 16位的
//*********************************************************************************************
CurieIMU.readTemperature()
31、检测晃动
//*********************************************************************************************
//函数名称:CurieIMU.shockDetected(int axis, int direction)
//输入参数:axis: the axis to check for shock detection. It must have one of these values:
// X_AXIS
// Y_AXIS
// Z_AXIS
// direction: the direction to check for shock detection. It must have one of these values:
// POSITIVE from zero to positive axis values
// NEGATIVE from zero to negative axis values
//函数返回:Ture False
//*********************************************************************************************
CurieIMU.shockDetected(int axis, int direction)
32、检测动作
//*********************************************************************************************
//函数名称:CurieImu.motionDetected(int axis, int direction)
//输入参数:axis: the axis to check for shock detection. It must have one of these values:
// X_AXIS
// Y_AXIS
// Z_AXIS
// direction: the direction to check for shock detection. It must have one of these values:
// POSITIVE from zero to positive axis values
// NEGATIVE from zero to negative axis values
//函数返回:Ture False
//*********************************************************************************************
CurieIMU.motionDetected(int axis, int direction)
33、其他检测
CurieIMU.tapDetected(int axis, int direction)
CurieIMU.stepsDetected()
34、注册中断函数
//*********************************************************************************************
//函数名称:CurieIMU.attachInterrupt(voidFuncPtr callback)
//输入参数:注册中断函数
//函数返回:无
//*********************************************************************************************
CurieIMU.attachInterrupt(voidFuncPtr callback)
35、取消注册中断函数
CurieIMU.detachInterrupt()
二、
Arduino101学习笔记(十三)—— 101六轴传感器的更多相关文章
- 20145213《Java程序设计学习笔记》第六周学习总结
20145213<Java程序设计学习笔记>第六周学习总结 说在前面的话 上篇博客中娄老师指出我因为数据结构基础薄弱,才导致对第九章内容浅尝遏止地认知.在这里我还要自我批评一下,其实我事后 ...
- python3.4学习笔记(十三) 网络爬虫实例代码,使用pyspider抓取多牛投资吧里面的文章信息,抓取政府网新闻内容
python3.4学习笔记(十三) 网络爬虫实例代码,使用pyspider抓取多牛投资吧里面的文章信息PySpider:一个国人编写的强大的网络爬虫系统并带有强大的WebUI,采用Python语言编写 ...
- 【Unity Shaders】学习笔记——SurfaceShader(六)混合纹理
[Unity Shaders]学习笔记——SurfaceShader(六)混合纹理 转载请注明出处:http://www.cnblogs.com/-867259206/p/5619810.html 写 ...
- java之jvm学习笔记十三(jvm基本结构)
java之jvm学习笔记十三(jvm基本结构) 这一节,主要来学习jvm的基本结构,也就是概述.说是概述,内容很多,而且概念量也很大,不过关于概念方面,你不用担心,我完全有信心,让概念在你的脑子里变成 ...
- Nodejs学习笔记(十六)--- Pomelo介绍&入门
目录 前言&介绍 安装Pomelo 创建项目并启动 创建项目 项目结构说明 启动 测试连接 聊天服务器 新建gate和chat服务器 配置master.json 配置servers.json ...
- python3.4学习笔记(二十六) Python 输出json到文件,让json.dumps输出中文 实例代码
python3.4学习笔记(二十六) Python 输出json到文件,让json.dumps输出中文 实例代码 python的json.dumps方法默认会输出成这种格式"\u535a\u ...
- Go语言学习笔记十三: Map集合
Go语言学习笔记十三: Map集合 Map在每种语言中基本都有,Java中是属于集合类Map,其包括HashMap, TreeMap等.而Python语言直接就属于一种类型,写法上比Java还简单. ...
- Nodejs学习笔记(十六)—Pomelo介绍&入门
前言&介绍 Pomelo:一个快速.可扩展.Node.js分布式游戏服务器框架 从三四年前接触Node.js开始就接触到了Pomelo,从Pomelo最初的版本到现在,总的来说网易出品还算不错 ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第六章:在Direct3D中绘制
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第六章:在Direct3D中绘制 代码工程地址: https://gi ...
随机推荐
- Xcode 必备插件管理器 http://alcatraz.io
各种小插件,其中写注释用的 VVDocumenter 是必备的!
- mysql日常语句总结
#删除mysql的二进制日志文件 #将删除mysql-bin.*****1之前的日志文件 purge binary logs to 'mysql-bin.*****1'; #重新生成一个二进制日志文件 ...
- Django~Databases
更换数据库 migrate 下哈 admin 要重新建立 修改\mysite\settings.py DATABASES = { 'default': { 'ENGINE': 'd ...
- [转] git fetch与pull
原文: http://www.tech126.com/git-fetch-pull/ Git中从远程的分支获取最新的版本到本地有这样2个命令:1. git fetch:相当于是从远程获取最新版本到本地 ...
- Greedy:Subsequence(POJ 3061)
和最短序列 题目大意:找出一个序列中比至少和S相等的最短子序列(连续的) 本来这道题可以二分法来做复杂度O(NlogN),也可以用一个类似于游标卡尺的方法O(N)来做 先来讲游标卡尺法: 因为子序 ...
- ant使用指南详细入门教程
这篇文章主要介绍了ant使用指南详细入门教程,本文详细的讲解了安装.验证安装.使用方法.使用实例.ant命令等内容,需要的朋友可以参考下 一.概述 ant 是一个将软件编译.测试.部署等步骤联系在一起 ...
- 【Excel 4.0 函数】REGISTER
REGISTER.ID 返回指定的 DLL 或 代码资源注册过的函数 ID.如果 DLL 或 代码资源没有注册,这个函数将会注册它们,并返回 注册ID. REGISTER.ID 可以用于工作表(不同于 ...
- IOS - ARC改为非ARC
1.project -> Build settings -> Apple LLVM complier 3.0 - Language -> objective-C Automatic ...
- osgi学习
Bundle可以被动态地安装.启动.停止和卸载.Bundle是服务(Service)和组件(Component)的载体.在OSGi中,每个Bundle都有自己独立于其他Bundle的ClassLoad ...
- Linq查询
//Linq查询 List<A1> a1 = new List<A1>(); a1.Add(, Name = , Gender = true }); a1.Add(, Name ...