二叉树学习笔记之B树、B+树、B*树
动态查找树主要有二叉查找树(Binary Search Tree),平衡二叉查找树(Balanced Binary Search Tree), 红黑树 (Red-Black Tree ),
都是典型的二叉查找树结构,查找的时间复杂度 O(log2-N) 与树的深度相关,降低树的深度会提高查找效率,于是有了多路的B-tree/B+-tree/ B*-tree (B~Tree)。
二叉查找树
二叉查找树即搜索二叉树,或者二叉排序树(BSTree)。
一、关于二叉查找树
二叉查找树(Binary Search Tree)是指一棵空树或者具有下列性质的二叉树:
1. 若任意节点的左子树不空,则左子树上所有节点的值均小于它的根节点的值;
2. 若任意节点的右子树不空,则右子树上所有节点的值均大于它的根节点的值;
3. 任意节点的左、右子树也分别为二叉查找树。
4. 没有键值相等的节点,这个特征很重要,可以帮助理解二叉排序树的很多操作。
二叉查找树具有很高的灵活性,对其优化可以生成平衡二叉树,红黑树等高效的查找和插入数据结构。
二、基本性质
(1)二叉查找树是一个递归的数据结构,对二叉查找树进行中序遍历,可以得到一个递增的有序序列。
(2)二叉查找树上基本操作的执行时间和树的高度成正比。
对一棵n个节点的完全二叉树来说,树的高度为lgn,这些操作的最坏情况运行时间为O(lg n),而如果是线性链表结构,这些操作的最坏运行时间是O(n)。
一棵随机构造的二叉查找树的期望高度为O(lg n),但实际中并不能总是保证二叉查找树是随机构造的,
有些二叉查找树的变形能保证各种基本操作的最坏情况性能,比如红黑树的高度为O(lg n),而B树对维护随机访问的二级存储器上的数据库特别有效。
注意对复杂度的理解,所谓的O(lg n)就是指复杂度是对数级别,是数量级的比较,和对数的底数其实没关系,
只要底数是大于1的,就是相同的数量级,有些书上说二叉查找树的复杂度是O(log2-n),指的是相同的时间复杂度。
三、前驱和后继节点
一个节点的后继是该节点的后一个,即比该节点键值稍大的节点。
给定一个二叉查找树中的节点,找出在中序遍历顺序下某个节点的前驱和后继。
如果树中所有关键字都不相同,则某一节点x的前驱就是小于key[x]的所有关键字中最大的那个节点,后继即是大于key[x]中的所有关键字中最小的那个节点。根据二叉查找树的结构和性质,不用对关键字做任何比较,就可以找到某个节点的前驱和后继。
四、查找、插入与删除
(1)查找
利用二叉查找树左小右大的性质,可以很容易实现查找任意值和最大/小值。
在二叉查找树中查找一个给定的关键字k的过程与二分查找很类似,
首先是关键字k与树根的关键字进行比较,如果k比根的关键字大,则在根的右子树中查找,否则在根的左子树中查找,重复此过程,直到找到与遇到空节点为止。
在二叉查找树中查找x的过程如下:
1.若二叉树是空树,则查找失败。
2.若x等于根节点的数据,则查找成功,否则。
3.若x小于根节点的数据,则递归查找其左子树,否则。
4.递归查找其右子树。
(2)插入
二叉树查找树b插入操作x的过程如下:
1.若b是空树,则直接将插入的节点作为根节点插入。
2.x等于b的根节点的数据的值,则直接返回,否则。
3.若x小于b的根节点的数据的值,则将x要插入的节点的位置改变为b的左子树,否则。
4.将x要出入的节点的位置改变为b的右子树。
(3)删除
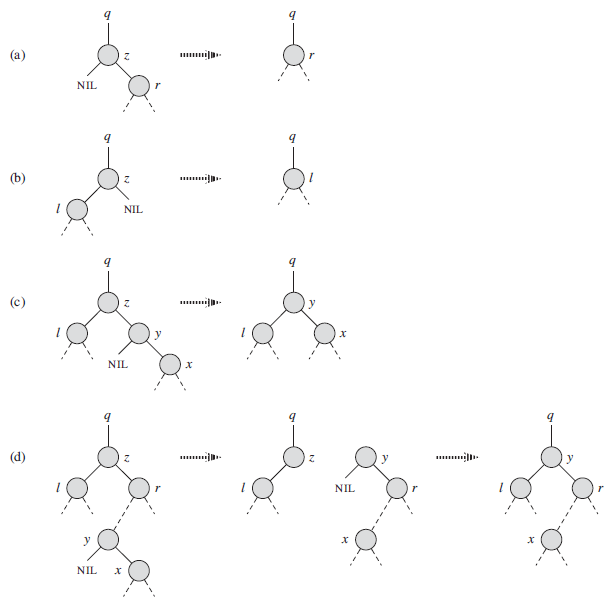
假设从二叉查找树中删除给定的结点z,分三种情况讨论:
1.节点z为叶子节点,没有孩子节点,那么直接删除z,修改父节点的指针即可。
2.节点z只有一个子节点或者子树,将节点z删除,根据二叉查找树的性质,将z的父节点与子节点关联就可以了。
3.节点Z有两个子节点,删除Z该怎样将Z的父结点与这两个孩子结点关联呢?
在删去节点Z之后,为保持其它元素之间的相对位置不变,可按中序遍历保持有序进行调整。
这种情况下可以用Z的后继节点来替代Z。
实现方法就是将后继从二叉树中删除,将后继的数据覆盖到Z中。
五、代码实现
public class BinarySearchTree <T extends Comparable<? super T>>{
//节点数据结构 静态内部类
static class BinaryNode<T>{
T data;
BinaryNode<T> left;
BinaryNode<T> right;
public BinaryNode(){
data=null;
}
public BinaryNode(T data) {
this(data,null,null);
}
public BinaryNode(T data,BinaryNode<T> left,BinaryNode<T> right){
this.data=data;
this.left=left;
this.right=right;
}
}
//私有的头结点
private BinaryNode<T> root;
//构造一棵空二叉树
public BinarySearchTree(){
root=null;
}
//二叉树判空
public boolean isEmpty(){
return root==null;
}
//清空二叉树
public void clear(){
root=null;
}
//检查某个元素是否存在
public boolean contains(T t){
return contains(t,root);
}
/**
* 从某个节点开始查找某个元素是否存在
* 在二叉查找树中查找x的过程如下:
* 1、若二叉树是空树,则查找失败。
* 2、若x等于根结点的数据,则查找成功,否则。
* 3、若x小于根结点的数据,则递归查找其左子树,否则。
* 4、递归查找其右子树。
*/
public boolean contains(T t,BinaryNode<T> node){
if(node==null){
return false;
}
/**
* 这就是为什么使用Comparable的泛型
* compareTo的对象也必须是实现了Comparable接口的泛型,
* 所以参数必须是BinaryNode<T> node格式
*/
int result=t.compareTo(node.data);
if(result>0){//去右子树查找
return contains(t,node.right);
}else if(result<0){//去左子树查找
return contains(t,node.left);
}else{
return false;
}
}
//插入元素
public void insert(T t){
root=insert(t,root);
}
/**
* 将节点插入到以某个节点为头的二叉树中
* 这个插入其实也是一个递归的过程
* 递归最深层的返回结果一个包含要插入的节点子树的头节点
*/
public BinaryNode insert(T t,BinaryNode<T> node){
//如果是空树,直接构造一棵新的二叉树
if(node==null){
return new BinaryNode<T>(t);
}
int result=t.compareTo(node.data);
if(result<0){
node.left=insert(t,node.left);
}else if(result>0){
node.right=insert(t,node.right);
}else{
;//即要插入的元素和头节点值相等,直接返回即可
}
return node;
}
/**
* 删除元素
* 返回调整后的二叉树头结点
*/
public BinaryNode delete(T t){
return delete(t,root);
}
/**
* 在以某个节点为头结点的树结构中删除元素
* 首先需要找到该关键字所在的节点p,然后具体的删除过程可以分为几种情况:
* p没有子女,直接删除p
* p有一个子女,直接删除p
* p有两个子女,删除p的后继q(q至多只有一个子女)
* 确定了要删除的节点q之后,就要修正q的父亲和子女的链接关系,
* 然后把q的值替换掉原先p的值,最后把q删除掉
*/
public BinaryNode delete(T t,BinaryNode<T> node){
if(node==null){//节点为空还要啥自行车
return node;
}
/**
* 首先要找到这个节点,所以还是得比较
*/
int result=t.compareTo(node.data);
/**
* 去左半部分找这个节点,
* 找到节点result==0,这个递归就停止
*/
if(result<0){
node.left=delete(t,node.left);
}else if(result>0){//去右半部分找这个节点
node.right=delete(t,node.right);
}
/**
* 如果这个节点的左右孩子都不为空,那么找到当前节点的后继节点,
*
*/
if(node.left!=null && node.right!=null){
/**
* node节点的右子树部分的最小节点,实际上就是它的后继节点
* 得到后继节点的值
*/
node.data = findMin(node.right).data;
/**
* 这个过程并不是删除后继节点,是一步一步的把所有的节点都替换上来
*/
node.right = delete(node.data,node.right);
}else{
/**
* 如果二叉搜索树中一个节点是完全节点,
* 那么它的前驱和后继节点一定在以它为头结点的子树中,应该是这样的
* 来到了只有一个头节点和一个子节点的情况
*/
node = (node.left!=null)?node.left:node.right;
}
//此处的node,是经过调整后的传入的root节点
return node;
}
/**
* 返回二叉树中的最小值节点
* 此时无比想念大根堆和小根堆
*/
public BinaryNode<T> findMin(BinaryNode node){
if(node==null)
return null;
/**
* 如果node不为空,就递归的去左边找
* 最小值节点肯定是左孩子为空的节点
*/
if(node.left!=null)
node=findMin(node.left);
return node;
}
}
B-树、B+树、B*树变体
关于这B树以及B树的两种变体,其实很好区分,
相比B树,B+树不维护关键字具体信息,不考虑value的存储,所有的我们需要的信息都在叶子节点上,
B*树在B+树的基础上增加了非叶子节点兄弟间的指针,在某些场景效率更高,
主要掌握B树的操作,也就掌握了这两种变体树的操作。
1.B树(B-tree),即B-树
B-树是为了磁盘或其它存储设备而设计的一种多叉平衡查找树。
(1)B-Tree的接点结构
B-tree中,每个结点包含:
本结点所含关键字的个数;
指向父结点的指针;
关键字;
指向子结点的指针数组;
#define Max l000 //结点中关键字的最大数目:Max=m-1,m是B-树的阶
#define Min 500 //非根结点中关键字的最小数目:Min=m/2-1
typedef int KeyType; //KeyType关键字类型由用户定义
typedef struct node{ //结点定义中省略了指向关键字代表的记录的指针
int keynum; //结点中当前拥有的关键字的个数,keynum<<Max
KeyType key[Max+1]; //关键字向量为key[1..keynum],key[0]不用。
struct node *parent; //指向双亲结点
struct node *son[Max+1];//指向孩子结点的指针数组,孩子指针向量为son[0..keynum]
}BTreeNode;
typedef BTreeNode *BTree;
(2)B-tree的特点
- B-tree是一种多路搜索树(并不是二叉的),对于一棵M阶树:
- 定义任意非叶子结点最多只有M个孩子;且M>2;
- 根结点的孩子数为[2, M],除非根结点为叶子节点;
- 除根结点以外的非叶子结点的儿子数为[M/2, M];
- 非叶子结点的关键字个数=指向儿子的指针个数-1;
- 每个非叶子结点存放至少M/2-1(取上整)和至多M-1个关键字;
- 非叶子结点的关键字:K[1], K[2], …, K[M-1];且K[i] < K[i+1];
- 非叶子结点的指针:P[1], P[2], …, P[M];其中P[1]指向关键字小于K[1]的子树,P[M]指向关键字大于K[M-1]的子树,其它P[i]指向关键字属于(K[i-1], K[i])的子树;
- 所有叶子结点位于同一层;
以M=3的一棵3阶B树为例:

一棵包含了24个英文字母的5阶B树的结构:

(3)B-tree高度与复杂度
B树的高度是 ,而不是其它几种树的H=log2n,其中T为度数(每个节点包含的元素个数),即所谓的阶数,n为总元素个数或总关键字数。
,而不是其它几种树的H=log2n,其中T为度数(每个节点包含的元素个数),即所谓的阶数,n为总元素个数或总关键字数。
B树查找的时间复杂度为O(Log2-N),下面是参考推导过程:

其中M为设定的非叶子结点最多子树个数,N为关键字总数;所以B-树的性能总是等价于二分查找(与M值无关),也就没有AVL树平衡的问题。
2.B-tree的基本操作
(1)查找操作
在B-树中查找给定关键字的方法类似于二叉排序树上的查找。不同的是在每个结点上确定向下查找的路径不一定是二路而是keynum+1路的。
对结点内的存放有序关键字序列的向量key[l..keynum] 用顺序查找或折半查找方法查找。若在某结点内找到待查的关键字K,则返回该结点的地址及K在key[1..keynum]中的位置;否则,确定K在某个key[i]和key[i+1]之间结点后,从磁盘中读son[i]所指的结点继续查找。直到在某结点中查找成功;或直至找到叶结点且叶结点中的查找仍不成功时,查找过程失败。
BTreeNode *SearchBTree(BTree T,KeyType K,int *pos)
{ //在B-树T中查找关键字K,成功时返回找到的结点的地址及K在其中的位置*pos
//失败则返回NULL,且*pos无定义
int i;
T→key[0]=k; //设哨兵.下面用顺序查找key[1..keynum]
for(i=T->keynum;K<t->key[i];i--); //从后向前找第1个小于等于K的关键字
if(i>0 && T->key[i]==1){ //查找成功,返回T及i
*pos=i;
return T;
} //结点内查找失败,但T->key[i]<K<T->key[i+1],下一个查找的结点应为
//son[i]
if(!T->son[i]) //*T为叶子,在叶子中仍未找到K,则整个查找过程失败
return NULL;
//查找插入关键字的位置,则应令*pos=i,并返回T,见后面的插入操作
DiskRead(T->son[i]); //在磁盘上读人下一查找的树结点到内存中
return SearchBTree(T->Son[i],k,pos); //递归地继续查找于树T->son[i]
}
(2)查找操作的时间开销
B-树上的查找有两个基本步骤:
1.在B-树中查找结点,该查找涉及读盘DiskRead操作,属外查找;
2.在结点内查找,该查找属内查找。
查找操作的时间为:
1.外查找的读盘次数不超过树高h,故其时间是O(h);
2.内查找中,每个结点内的关键字数目keynum<m(m是B-树的阶数),故其时间为O(nh)。
注意:
1.实际上外查找时间可能远远大于内查找时间。
2.B-树作为数据库文件时,打开文件之后就必须将根结点读人内存,而直至文件关闭之前,此根一直驻留在内存中,故查找时可以不计读入根结点的时间。
(3)插入操作
插入一个元素时,首先在B树中是否存在,如果不存在,即在叶子结点处结束,然后在叶子结点中插入该新的元素,注意:如果叶子结点空间足够,这里需要向右移动该叶子结点中大于新插入关键字的元素,如果空间满了以致没有足够的空间去添加新的元素,则将该结点进行“分裂”,将一半数量的关键字元素分裂到新的其相邻右结点中,中间关键字元素上移到父结点中(当然,如果父结点空间满了,也同样需要“分裂”操作),而且当结点中关键元素向右移动了,相关的指针也需要向右移。如果在根结点插入新元素,空间满了,则进行分裂操作,这样原来的根结点中的中间关键字元素向上移动到新的根结点中,因此导致树的高度增加一层。
(4)删除操作
首先查找B树中需删除的元素,如果该元素在B树中存在,则将该元素在其结点中进行删除,如果删除该元素后,首先判断该元素是否有左右孩子结点,如果有,则上移孩子结点中的某相近元素到父节点中,然后是移动之后的情况;如果没有,直接删除后,移动之后的情况。
3.B+树(B+-tree)
B+-tree是应文件系统所需而产生的一种B-tree的变形树。
(1)B树和B+树的对比
一棵m阶的B+树和m阶的B树的异同点在于:
1.有n棵子树的结点中含有n-1 个关键字;
2.所有的叶子结点中包含了全部关键字的信息,及指向含有这些关键字记录的指针,且叶子结点本身依关键字的大小自小而大的顺序链接。 (而B 树的叶子节点并没有包括全部需要查找的信息)
3.所有的非终端结点可以看成是索引部分,结点中仅含有其子树根结点中最大(或最小)关键字。 (而B 树的非终节点也包含需要查找的有效信息)
(2)为什么说B+-tree比B 树更适合实际应用中操作系统的文件索引和数据库索引?
- B+-tree的磁盘读写代价更低
B+-tree的内部结点并没有指向关键字具体信息的指针。因此其内部结点相对B 树更小。
如果把所有同一内部结点的关键字存放在同一盘块中,那么盘块所能容纳的关键字数量也越多。
一次性读入内存中的需要查找的关键字也就越多。相对来说IO读写次数也就降低了。
举个例子,假设磁盘中的一个盘块容纳16bytes,而一个关键字2bytes,一个关键字具体信息指针2bytes。
一棵9阶B-tree(一个结点最多8个关键字)的内部结点需要2个盘快。而B+ 树内部结点只需要1个盘快。当需要把内部结点读入内存中的时候,B 树就比B+ 树多一次盘块查找时间(在磁盘中就是盘片旋转的时间)。
- B+-tree的查询效率更加稳定
由于非终结点并不是最终指向文件内容的结点,而只是叶子结点中关键字的索引。所以任何关键字的查找必须走一条从根结点到叶子结点的路。所有关键字查询的路径长度相同,导致每一个数据的查询效率相当。
4.B*树(B*-tree)
B*-tree是B+-tree的变体,在B+树的基础上(所有的叶子结点中包含了全部关键字的信息,及指向含有这些关键字记录的指针),
B*树中非根和非叶子结点再增加指向兄弟的指针;
B*树定义了非叶子结点关键字个数至少为(2/3)*M,即块的最低使用率为2/3(代替B+树的1/2)。
下图是一棵典型的B*树:

二叉树学习笔记之B树、B+树、B*树的更多相关文章
- 二叉树学习笔记之经典平衡二叉树(AVL树)
二叉查找树(BSTree)中进行查找.插入和删除操作的时间复杂度都是O(h),其中h为树的高度.BST的高度直接影响到操作实现的性能,最坏情况下,二叉查找树会退化成一个单链表,比如插入的节点序列本身就 ...
- 洛谷P4197 Peaks&&克鲁斯卡尔重构树学习笔记(克鲁斯卡尔重构树+主席树)
传送门 据说离线做法是主席树上树+启发式合并(然而我并不会) 据说bzoj上有强制在线版本只能用克鲁斯卡尔重构树,那就好好讲一下好了 这里先感谢LadyLex大佬的博客->这里 克鲁斯卡尔重构树 ...
- [学习笔记]Segment Tree Beats!九老师线段树
对于这样一类问题: 区间取min,区间求和. N<=100000 要求O(nlogn)级别的算法 直观体会一下,区间取min,还要维护区间和 增加的长度很不好求.... 然鹅, 从前有一个来自杭 ...
- 二叉树学习笔记之二叉查找树(BSTree)
二叉查找树即搜索二叉树,或者二叉排序树(BSTree),学习回顾一下有关的知识. >>关于二叉查找树 二叉查找树(Binary Search Tree)是指一棵空树或者具有下列性质的二叉树 ...
- 左偏树 / 非旋转treap学习笔记
背景 非旋转treap真的好久没有用过了... 左偏树由于之前学的时候没有写学习笔记, 学得也并不牢固. 所以打算写这么一篇学习笔记, 讲讲左偏树和非旋转treap. 左偏树 定义 左偏树(Lefti ...
- 线段树学习笔记(基础&进阶)(一) | P3372 【模板】线段树 1 题解
什么是线段树 线段树是一棵二叉树,每个结点存储需维护的信息,一般用于处理区间最值.区间和等问题. 线段树的用处 对编号连续的一些点进行修改或者统计操作,修改和统计的复杂度都是 O(log n). 基础 ...
- CART分类与回归树 学习笔记
CART:Classification and regression tree,分类与回归树.(是二叉树) CART是决策树的一种,主要由特征选择,树的生成和剪枝三部分组成.它主要用来处理分类和回归问 ...
- Treap-平衡树学习笔记
平衡树-Treap学习笔记 最近刚学了Treap 发现这种数据结构真的是--妙啊妙啊~~ 咳咳.... 所以发一发博客,也是为了加深蒟蒻自己的理解 顺便帮助一下各位小伙伴们 切入正题 Treap的结构 ...
- zkw线段树学习笔记
zkw线段树学习笔记 今天模拟赛线段树被卡常了,由于我自带常数 \(buff\),所以学了下zkw线段树. 平常的线段树无论是修改还是查询,都是从根开始递归找到区间的,而zkw线段树直接从叶子结点开始 ...
随机推荐
- js刷新页面的几种方法
history.go(0) location.reload() location=location location.assign(location) document.execCommand('Re ...
- git 教程(1)--安装git
在Linux上安装Git 首先,你可以试着输入git,看看系统有没有安装Git: gi 如果你碰巧用Debian或Ubuntu Linux,通过一条sudo apt-get install git就可 ...
- Android自定义标题栏
预览一下效果: 素材: 新建一个布局title_bar.xml,代码如下: <?xml version="1.0" encoding="utf-8"?&g ...
- am335x sd卡启动系统参数设置
首先直接记录结果 在u-boot 中修改参数 #define AUTO_UPDATESYS */ 直接把这个参数注释掉. 这个参数是原来用来升级nor flash 启动系统设置的一个参数,也就是说, ...
- busybox microcom
/************************************************************************* * busybox microcom * 说明: ...
- BZOJ 1461: 字符串的匹配
Description 同上题. Sol KMP+树状数组. 写这题的时候我灰常naive...不管了...直接贴代码... Code /******************************* ...
- BZOJ 1090: [SCOI2003]字符串折叠
Sol 区间DP. 转移很简单,枚举会形成的断长转移就行,话说上一题我就跟这个是差不多的思路,转移改了改,然后死活过不了... 同样都是SCOI的题...相差4年... Code /********* ...
- PE355
似乎我和lyx讨论过这题..? LP可解决..(~0.8s)
- MySQL知识点链接
1.使用ab进行压力测试详解 http://www.365mini.com/page/apache-benchmark. ...
- MySQL 通过idb文件恢复Innodb 数据【转】
昨晚收到一则求助,一个用户的本地数据库的重要数据由于误操作被删除,需要进行紧急恢复,用户的数据库日常并没有进行过任何备份,binlog也没有开启,所以从备份和binlog入手已经成为不可能,咨询了丁奇 ...