Cartographer源码阅读(5):PoseGraph位姿图
PoseGraph位姿图
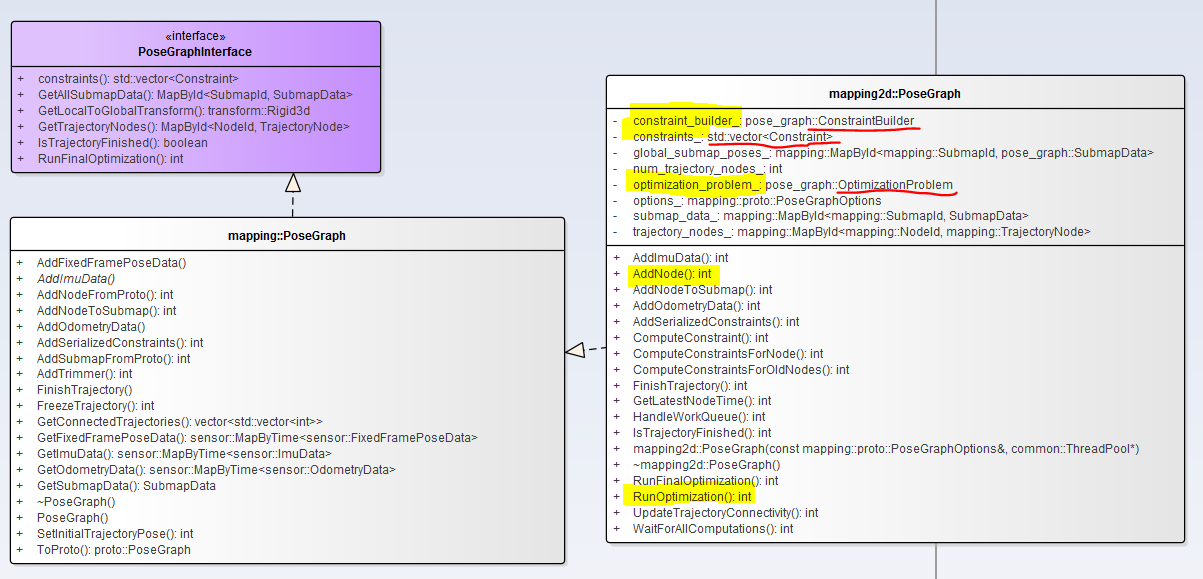
mapping2D::PoseGraph类的注释:
|
// Implements the loop closure method called Sparse Pose Adjustment (SPA) from |
1.继承关系mapping,mapping2D,mapping3D (以前叫sparse_pose_graph.h,目前名称被修改了)
类中一个很重要的类OptimizationProblem对象optimization_problem_,该类的注释是Implements the SPA loop closure method.即实现了SPA方法的闭环。
类的主要成员变量和成员函数如类图所示,其中重要的方法PoseGraph::RunOptimization()。
pose_graph::OptimizationProblem optimization_problem_;
pose_graph::ConstraintBuilder constraint_builder_ GUARDED_BY(mutex_);
std::vector<Constraint> constraints_ GUARDED_BY(mutex_);
接上一篇在PoseGraph::AddNode方法中调用了 AddTrajectoryIfNeeded() 和 PoseGraph::ComputeConstraintsForNode()方法。
- void PoseGraph::ComputeConstraintsForNode(
- const mapping::NodeId& node_id,
- std::vector<std::shared_ptr<const Submap>> insertion_submaps,
- const bool newly_finished_submap) {
- const auto& constant_data = trajectory_nodes_.at(node_id).constant_data;
- const std::vector<mapping::SubmapId> submap_ids = InitializeGlobalSubmapPoses(
- node_id.trajectory_id, constant_data->time, insertion_submaps);
- CHECK_EQ(submap_ids.size(), insertion_submaps.size());
- const mapping::SubmapId matching_id = submap_ids.front();
- const transform::Rigid2d pose = transform::Project2D(
- constant_data->local_pose *
- transform::Rigid3d::Rotation(constant_data->gravity_alignment.inverse()));
- const transform::Rigid2d optimized_pose =
- optimization_problem_.submap_data().at(matching_id).global_pose *
- pose_graph::ComputeSubmapPose(*insertion_submaps.front()).inverse() *
- pose;
- optimization_problem_.AddTrajectoryNode(
- matching_id.trajectory_id, constant_data->time, pose, optimized_pose,
- constant_data->gravity_alignment);
- for (size_t i = ; i < insertion_submaps.size(); ++i) {
- const mapping::SubmapId submap_id = submap_ids[i];
- // Even if this was the last node added to 'submap_id', the submap will only
- // be marked as finished in 'submap_data_' further below.
- CHECK(submap_data_.at(submap_id).state == SubmapState::kActive);
- submap_data_.at(submap_id).node_ids.emplace(node_id);
- const transform::Rigid2d constraint_transform =
- pose_graph::ComputeSubmapPose(*insertion_submaps[i]).inverse() * pose;
- constraints_.push_back(Constraint{submap_id,
- node_id,
- {transform::Embed3D(constraint_transform),
- options_.matcher_translation_weight(),
- options_.matcher_rotation_weight()},
- Constraint::INTRA_SUBMAP});
- }
- for (const auto& submap_id_data : submap_data_) {
- if (submap_id_data.data.state == SubmapState::kFinished) {
- CHECK_EQ(submap_id_data.data.node_ids.count(node_id), );
- ComputeConstraint(node_id, submap_id_data.id);
- }
- }
- if (newly_finished_submap) {
- const mapping::SubmapId finished_submap_id = submap_ids.front();
- SubmapData& finished_submap_data = submap_data_.at(finished_submap_id);
- CHECK(finished_submap_data.state == SubmapState::kActive);
- finished_submap_data.state = SubmapState::kFinished;
- // We have a new completed submap, so we look into adding constraints for
- // old nodes.
- ComputeConstraintsForOldNodes(finished_submap_id);
- }
- constraint_builder_.NotifyEndOfNode();
- ++num_nodes_since_last_loop_closure_;
- if (options_.optimize_every_n_nodes() > &&
- num_nodes_since_last_loop_closure_ > options_.optimize_every_n_nodes()) {
- CHECK(!run_loop_closure_);
- run_loop_closure_ = true;
- // If there is a 'work_queue_' already, some other thread will take care.
- if (work_queue_ == nullptr) {
- work_queue_ = common::make_unique<std::deque<std::function<void()>>>();
- HandleWorkQueue();
- }
- }
- }
可以看到对本类中ComputeConstraint、ComputeConstraintsForOldNodes、HandleWorkQueue方法的调用。这里有个pose_graph::ComputeSubmapPose方法在cartographer/mapping_2d/pose_graph/constraint_builder.h文件中。子图submap位姿?
- transform::Rigid2d ComputeSubmapPose(const Submap& submap)
- {
- return transform::Project2D(submap.local_pose());
- }
注意HandleWorkQueue()方法中调用了RunOptimization方法。
- void PoseGraph::HandleWorkQueue() {
- constraint_builder_.WhenDone(
- [this](const pose_graph::ConstraintBuilder::Result& result) {
- {
- common::MutexLocker locker(&mutex_);
- constraints_.insert(constraints_.end(), result.begin(), result.end());
- }
- RunOptimization();
- common::MutexLocker locker(&mutex_);
- for (const Constraint& constraint : result) {
- UpdateTrajectoryConnectivity(constraint);
- }
- TrimmingHandle trimming_handle(this);
- for (auto& trimmer : trimmers_) {
- trimmer->Trim(&trimming_handle);
- }
- trimmers_.erase(
- std::remove_if(
- trimmers_.begin(), trimmers_.end(),
- [](std::unique_ptr<mapping::PoseGraphTrimmer>& trimmer) {
- return trimmer->IsFinished();
- }),
- trimmers_.end());
- num_nodes_since_last_loop_closure_ = ;
- run_loop_closure_ = false;
- while (!run_loop_closure_) {
- if (work_queue_->empty()) {
- work_queue_.reset();
- return;
- }
- work_queue_->front()();
- work_queue_->pop_front();
- }
- LOG(INFO) << "Remaining work items in queue: " << work_queue_->size();
- // We have to optimize again.
- HandleWorkQueue();
- });
- }
PoseGraph::HandleWorkQueue
查看PoseGraph::RunOptimization方法,
- void PoseGraph::RunOptimization()
- {
- if (optimization_problem_.submap_data().empty())
- {
- return;
- }
- // No other thread is accessing the optimization_problem_, constraints_ and
- // frozen_trajectories_ when executing the Solve. Solve is time consuming, so
- // not taking the mutex before Solve to avoid blocking foreground processing.
- optimization_problem_.Solve(constraints_, frozen_trajectories_);
- common::MutexLocker locker(&mutex_);
- const auto& submap_data = optimization_problem_.submap_data();
- const auto& node_data = optimization_problem_.node_data();
- for (const int trajectory_id : node_data.trajectory_ids())
- {
- for (const auto& node : node_data.trajectory(trajectory_id))
- {
- auto& mutable_trajectory_node = trajectory_nodes_.at(node.id);
- mutable_trajectory_node.global_pose =
- transform::Embed3D(node.data.pose) *
- transform::Rigid3d::Rotation(mutable_trajectory_node.constant_data->gravity_alignment);
- }
- // Extrapolate all point cloud poses that were not included in the
- // 'optimization_problem_' yet.
- const auto local_to_new_global =
- ComputeLocalToGlobalTransform(submap_data, trajectory_id);
- const auto local_to_old_global =
- ComputeLocalToGlobalTransform(global_submap_poses_, trajectory_id);
- const transform::Rigid3d old_global_to_new_global =
- local_to_new_global * local_to_old_global.inverse();
- const mapping::NodeId last_optimized_node_id =
- std::prev(node_data.EndOfTrajectory(trajectory_id))->id;
- auto node_it = std::next(trajectory_nodes_.find(last_optimized_node_id));
- for (; node_it != trajectory_nodes_.EndOfTrajectory(trajectory_id); ++node_it)
- {
- auto& mutable_trajectory_node = trajectory_nodes_.at(node_it->id);
- mutable_trajectory_node.global_pose =
- old_global_to_new_global * mutable_trajectory_node.global_pose;
- }
- }
- global_submap_poses_ = submap_data;
- }
查看Constraint 结构体,该结构体在PoseGraphInterface中定义。
- // A "constraint" as in the paper by Konolige, Kurt, et al. "Efficient sparse
- // pose adjustment for 2d mapping." Intelligent Robots and Systems (IROS),
- // 2010 IEEE/RSJ International Conference on (pp. 22--29). IEEE, 2010.
- struct Constraint {
- struct Pose {
- transform::Rigid3d zbar_ij;
- double translation_weight;
- double rotation_weight;
- };
- SubmapId submap_id; // 'i' in the paper.
- NodeId node_id; // 'j' in the paper.
- // Pose of the node 'j' relative to submap 'i'.
- Pose pose;
- // Differentiates between intra-submap (where node 'j' was inserted into
- // submap 'i') and inter-submap constraints (where node 'j' was not inserted
- // into submap 'i').
- enum Tag { INTRA_SUBMAP, INTER_SUBMAP } tag;
- };
Cartographer源码阅读(5):PoseGraph位姿图的更多相关文章
- Cartographer源码阅读(9):图优化的前端——闭环检测
约束计算 闭环检测的策略:搜索闭环,通过匹配检测是否是闭环,采用了分支定界法. 前已经述及PoseGraph的内容,此处继续.位姿图类定义了pose_graph::ConstraintBuilder ...
- Cartographer源码阅读(7):轨迹推算和位姿推算的原理
其实也就是包括两个方面的内容:类似于运动模型的位姿估计和扫描匹配,因为需要计算速度,所以时间就有必要了! 1. PoseExtrapolator解决了IMU数据.里程计和位姿信息进行融合的问题. 该类 ...
- Cartographer源码阅读(6):LocalTrajectoryBuilder和PoseExtrapolator
LocalTrajectoryBuilder意思是局部轨迹的构建,下面的类图中方法的参数没有画进去. 注意其中的三个类:PoseExtrapolator类,RealTimeCorrelativeSca ...
- Cartographer源码阅读(4):Node和MapBuilder对象2
MapBuilder的成员变量sensor::Collator sensor_collator_; 再次阅读MapBuilder::AddTrajectoryBuilder方法.首先构造了mappin ...
- Cartographer源码阅读(3):程序逻辑结构
Cartographer早期的代码在进行3d制图的时候使用了UKF方法,查看现有的tag版本,可以转到0.1.0和0.2.0查看,包含kalman_filter文件夹. 文件夹中的pose_track ...
- Cartographer源码阅读(2):Node和MapBuilder对象
上文提到特别注意map_builder_bridge_.AddTrajectory(x,x),查看其中的代码.两点: 首先是map_builder_.AddTrajectoryBuilder(...) ...
- Cartographer源码阅读(1):程序入口
带着几个思考问题: (1)IMU数据的使用,如何融合,Kalman滤波? (2)图优化的具体实现,闭环检测的策略? (3)3D激光的接入和闭环策略? 1. 安装Kdevelop工具: http://b ...
- Cartographer源码阅读(8):imu_tracker
IMU的输入为imu_linear_acceleration 和 imu_angular_velocity 线加速和角速度.最终作为属性输出的是方位四元数. Eigen::Quaterniond ...
- 【原】AFNetworking源码阅读(六)
[原]AFNetworking源码阅读(六) 本文转载请注明出处 —— polobymulberry-博客园 1. 前言 这一篇的想讲的,一个就是分析一下AFSecurityPolicy文件,看看AF ...
随机推荐
- 从零开始搭建FAQ引擎--深度语义匹配
从零开始搭建FAQ引擎--深度语义匹配
- [Linux]systemd和sysV
转自:https://www.cnblogs.com/EasonJim/p/7168216.html 在Debian8中systemd和sysVinit同时存在,NTP就是在/etc/init.d/n ...
- linux和windows强制用户第一次登陆修改密码
linux: passwd -e root windows: 计算机右键->管理->本地用户和组->用户->administrator->下一次登陆修改密码 如果密码复杂 ...
- replay的意义
数据库重放: () 在测试环境中重新创建实际的生产数据库工作量. () 在生产中实施更改之前,确定和分析潜在的不稳定性. () 捕获生产中的工作量:
- 危险代码:如何使用Unsafe操作内存中的Java类和对象
危险代码:如何使用Unsafe操作内存中的Java类和对象—Part1 危险代码:如何使用Unsafe操作内存中的Java类和对象—Part2 危险代码:如何使用Unsafe操作内存中的Java类和对 ...
- git rebase 的使用
rebase 在 Git 中整合来自不同分支的修改主要有两种方法:merge 以及 rebase. 在本节中我们将学习什么是“rebase”,怎样使用“rebase”,并将展示该操作的惊艳之处,以及指 ...
- QT中事件处理器和事件过滤器实现实例
Qt中事件处理的方式,最常用的就是使用事件处理器(event handler)和事件过滤器(event filter)这两种方法.接下来,我们就来看看事件处理器和事件过滤器是怎么使用的. 事件处理器 ...
- linux下GPRS模块使用AT命令实现拨接电话,发中英文短信
开发板 :fl2440 cpu : s3c2440(arm9) 开发模块 :A7(GPRS/GPS) 远程登陆软件:PUTTY **** ...
- ubuntu16.04 在/etc/network/interfaces设置static ip无效
双网卡使用无线网卡上互联网,使用以太网卡连局域网,在/etc/network/interfaces里对以太网卡设置static ip无效,使用ifconfig临时设置也仅能工作一会,设置的ip马上就消 ...
- js 注意
1.如果想要动态加清除浮动的代码,可以这样做: document.getElementById("mainBody").innerHTML += "<div sty ...