python opencv3 FLANN单应性匹配
git:https://github.com/linyi0604/Computer-Vision
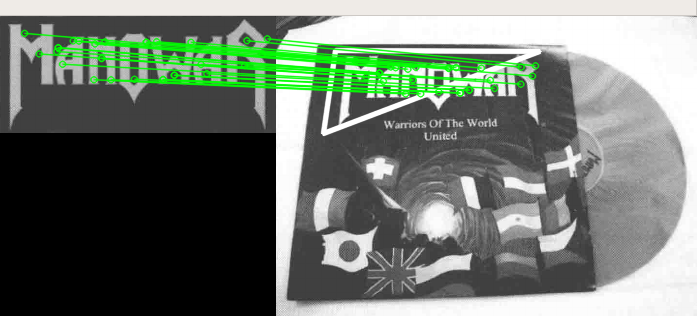
匹配准确率非常高。
单应性指的是图像在投影发生了 畸变后仍然能够有较高的检测和匹配准确率
# coding:utf-8 """
单应性匹配:
两幅图像中的一幅 出现投影畸变的时候,他们还能彼此匹配
""" import cv2
import numpy as np
# 最小匹配数量设为10个, 大于这个数量从中筛选出10个最好的
MIN_MATCH_COUNT = 10 # 读入两幅图片 图片中有相同部分
img1 = cv2.imread("../data/logo1.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("../data/album1.png", cv2.IMREAD_GRAYSCALE) # 获取sift特征检测器
sift = cv2.xfeatures2d.SIFT_create()
# 检测关键点 计算描述符
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None) # kdtree建立索引方式的常量参数
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50) # checks指定索引树要被遍历的次数
flann = cv2.FlannBasedMatcher(index_params, search_params)
# 进行匹配搜索
matches = flann.knnMatch(des1, des2, k=2) # 寻找距离近的放入good列表
good = []
for m, n in matches:
if m.distance < 0.7 * n.distance:
good.append(m) # 如果足够多 就筛选
if len(good) > MIN_MATCH_COUNT:
# 通过距离近的描述符 找到两幅图片的关键点
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2) # 单应性匹配图关键点匹配线。。不懂啥意思
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
matchesMask = mask.ravel().tolist() h, w = img1.shape # 计算第二张图相对于第一张图的畸变
pts = np.float32([[0, 0], [0, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv2.perspectiveTransform(pts, M)
img2 = cv2.polylines(img2, [np.int32(dst)], True, 255, 3, cv2.LINE_AA)
else:
matchesMask = None draw_params = dict(
matchColor=(0, 255, 0),
singlePointColor=None,
matchesMask=matchesMask,
flags=2
) img3 = cv2.drawMatches(img1, kp1, img2, kp2, good, None, **draw_params)
cv2.imshow("", img3)
cv2.waitKey()
python opencv3 FLANN单应性匹配的更多相关文章
- OpenCV仿射变换+投射变换+单应性矩阵
本来想用单应性求解小规模运动的物体的位移,但是后来发现即使是很微小的位移也会带来超级大的误差甚至错误求解,看起来这个方法各种行不通,还是要匹配知道深度了以后才能从三维仿射变换来入手了,纠结~ esti ...
- 机器学习进阶-案例实战-图像全景拼接-图像全景拼接(RANSCA) 1.sift.detectAndComputer(获得sift图像关键点) 2.cv2.findHomography(计算单应性矩阵H) 3.cv2.warpPerspective(获得单应性变化后的图像) 4.cv2.line(对关键点位置进行连线画图)
1. sift.detectAndComputer(gray, None) # 计算出图像的关键点和sift特征向量 参数说明:gray表示输入的图片 2.cv2.findHomography(kp ...
- 【Computer Vision】图像单应性变换/投影/仿射/透视
一.基础概念 1. projective transformation = homography = collineation. 2. 齐次坐标:使用N+1维坐标来表示N维坐标,例如在2D笛卡尔坐标 ...
- 单应性(homography)变换的推导
矩阵的一个重要作用是将空间中的点变换到另一个空间中.这个作用在国内的<线性代数>教学中基本没有介绍.要能形像地理解这一作用,比较直观的方法就是图像变换,图像变换的方法很多,单应性变换是其中 ...
- 相机标定 和 单应性矩阵H
求解相机参数的过程就称之为相机标定. 1.相机模型中的四个平面坐标系: 1.1图像像素坐标系(u,v) 以像素为单位,是以图像的左上方为原点的图像坐标系: 1.2图像物理坐标系(也叫像平面坐标系)(x ...
- OpenCV 之 平面单应性
上篇 OpenCV 之 图象几何变换 介绍了等距.相似和仿射变换,本篇侧重投影变换的平面单应性.OpenCV相关函数.应用实例等. 1 投影变换 1.1 平面单应性 投影变换 (Projectiv ...
- OpenCV-Python 特征匹配 + 单应性查找对象 | 四十五
目标 在本章节中,我们将把calib3d模块中的特征匹配和findHomography混合在一起,以在复杂图像中找到已知对象. 基础 那么我们在上一环节上做了什么?我们使用了queryImage,找到 ...
- opencv 仿射变换 投射变换, 单应性矩阵
仿射 estimateRigidTransform():计算多个二维点对或者图像之间的最优仿射变换矩阵 (2行x3列),H可以是部分自由度,比如各向一致的切变. getAffineTransform( ...
- 相机标定:PNP基于单应面解决多点透视问题
利用二维视野内的图像,求出三维图像在场景中的位姿,这是一个三维透视投影的反向求解问题.常用方法是PNP方法,需要已知三维点集的原始模型. 本文做了大量修改,如有不适,请移步原文: ...
随机推荐
- 倍增 Tarjan 求LCA
...
- 使用 TypeScript 改造构建工具及测试用例
最近的一段时间一直在搞TypeScript,一个巨硬出品.赋予JavaScript语言静态类型和编译的语言. 第一个完全使用TypeScript重构的纯Node.js项目已经上线并稳定运行了. 第二个 ...
- APScheduler API -- apscheduler.triggers.cron
apscheduler.triggers.cron API Trigger alias for add_job(): cron class apscheduler.triggers.cron.Cron ...
- Flip Bits
Determine the number of bits required to flip if you want to convert integer n to integer m. Notice ...
- Tslib的移植【转】
转自:http://www.cnblogs.com/uvsjoh/archive/2011/08/25/2152947.html移植Tslib 1 下载源码tslib-x.x.tar.gz 2 解压, ...
- 一步一步搭建11gR2 rac+dg之DG 机器配置(七)【转】
DG 机器配置 转自: 一步一步搭建11gR2 rac+dg之DG 机器配置(七)-lhrbest-ITPUB博客http://blog.itpub.net/26736162/viewspace-12 ...
- 安装Visual Studio Scrum 1.0过程模板
近几年里,Scrum变成了相当流行的软件开发方法学.因为它轻量.可迭代且快速等优点,以致于在敏捷开发中极受欢迎.微软甚至将TFS2010自带的MSF Agile5.0过程模板做得像Scrum,开发者们 ...
- COM组件服务访问权限
解决办法 :添加ASP.NET权限访问COM组件服务. IIS 5 上为 {MACHINE}\ASPNET IIS 6 和 IIS 7 上为网络服务:NETWORK SERVICE IIS 7.5 上 ...
- SQLAlchemy-方言(Dialects)
一: Dialects 文档是分为三个部分: SQLAlchemy ORM, SQLAlchemy Core, and Dialects. SQLAlchemy ORM:在SQLAlchemy ORM ...
- 读书笔记--C陷阱与缺陷(三)
第三章 1. 指针与数组 书中强调C中数组注意的两点: 1) C语言只有一维数组,但是数组元素可以是任何类型对象,是另外一个数组时就产生了二维数组.数组大小是常数(但GCC实现了变长数组..) ...