1.移植3.4内核-分析内核启动过程,重新分区,烧写jffs2文件系统
1.在上章-移植uboot里.我们来分析下uboot是如何进入到内核的
首先,uboot启动内核是通过bootcmd命令行实现的,在我们之前移植的bootcmd命令行如下所示:
bootcmd=nand read 0x30000000 kernel; bootm 0x30000000 //bootm:从0x30000000处启动内核
1.1然后我们进入cmd_bootm.c,找到对应的bootm命令对应的do_bootm():
int do_bootm(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[])
{
boot_os_fn *boot_fn; //boot_fn是个数组函数
... .. boot_fn(, argc, argv, &images); //调用数组函数
... ...
}
上面的boot_os_fn是个typedef型,如下图所示:
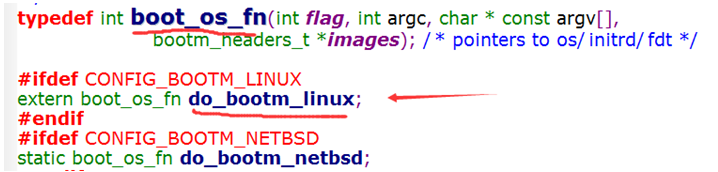
1.2由于定义了宏CONFIG_BOOTM_LINUX,最终会跳转到do_bootm ->do_bootm_linux()
代码如下所示:
int do_bootm_linux(int flag, int argc, char *argv[], bootm_headers_t *images)
{
/* No need for those on ARM */
if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
return -;
if (flag & BOOTM_STATE_OS_PREP) {
boot_prep_linux(images);
return ;
}
if (flag & BOOTM_STATE_OS_GO) {
boot_jump_linux(images);
return ;
} boot_prep_linux(images); //该函数会将各个tag参数保存在指定位置,比如:内存tag、bootargs环境变量tag、串口tag等
boot_jump_linux(images); //该函数会跳转到内核起始地址
return ;
}
1.3最终跳转到do_bootm ->do_bootm_linux-> boot_jump_linux()
代码如下所示:
static void boot_jump_linux(bootm_headers_t *images)
{
unsigned long machid = gd->bd->bi_arch_number; //获取机器ID
char *s;
void (*kernel_entry)(int zero, int arch, uint params);
unsigned long r2;
kernel_entry = (void (*)(int, int, uint))images->ep; //设置kernel_entry()的地址为0x30000000
s = getenv("machid"); //判断环境变量machid是否设置,若设置则使用环境变量里的值
if (s) {
strict_strtoul(s, , &machid); //重新获取机器ID
printf("Using machid 0x%lx from environment\n", machid); //使用环境变量的machid
}
... ...
r2 = gd->bd->bi_boot_params; //获取tag参数地址, gd->bd->bi_boot_params在setup_start_tag()函数里被设置
kernel_entry(, machid, r2); //跳转到0x30000000,r0=0,r1=机器ID,r2=tag参数地址
}
上面的machid默认值为MACH_TYPE_SMDK2410(也就是),我们也可以在环境变量里设置machid变量
1.4最终,便跳到内核执行代码,步骤如下所示:
- 1)根据R1(机器ID),来判断内核是否支持该机器,若支持则初始化机器相关函数
- 2)解析TAG参数,初始化串口,设置内存等
- 3)挂载根文件系统,并执行应用程序
2.接下来便从网上下载3.4.2内核来移植.
2.1修改Makefile,修改配置
tar xjf linux-3.4..tar.bz2
cd linux-3.4./
vi Makefile
找到下面这句话:
ARCH ?= $(SUBARCH)
CROSS_COMPILE ?= $(CONFIG_CROSS_COMPILE:"%"=%)
改为:
ARCH ?= arm
CROSS_COMPILE ?= arm-linux-
(PS:我使用的是4.3.2,若交叉编译工具版本太低,可能无法编译)
2.2 配置编译
cd arch/arm/configs //由于我们板子是arm板,进入该目录
ls ** //找到有mini2440_defconfig、
ls ** //找到有s3c2410_defconfig cd ../../..
make s3c2410_defconfig //配置2410, 更新.config配置文件
make uImage //编译,生成uImage
cp uImage /work/nfs_root/ uImage_new //用nfs下载
3进入uboot烧写
nfs 192.168.2.106:/work/nfs_root/uImage_new
bootm
如下图所示,发现串口输出乱码:

出现这个问题,可以先看看bootargs命令行的串口设置是否正确、uboot传递的机器ID是否正确.
3.1找到bootargs命令行的串口没有设置波特率,修改bootargs:
set bootargs root=/dev/mtdblock3 console=ttySAC0,
3.2 测试机器ID是否正确
在我们1.3小节代码分析里,讲到过uboot传递进来的机器ID可以通过环境变量machid来设置
所以任意设置一个ID,这样再次启动内核时,内核识别不出来,就会打印出所有设备对应的机器ID
进入uboot,输入:
set machid
tftp uImage
bootm
如下图所示,由于内核不支持这个机器ID,所以打印出内核能支持的ID表:
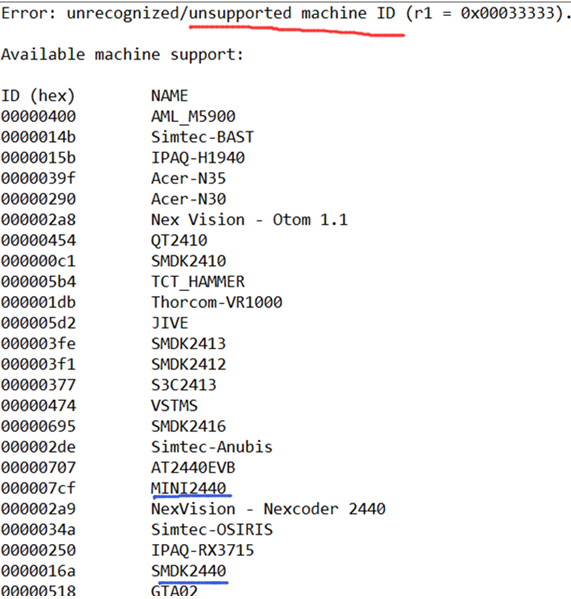
由于我们板子是2440,所以测试7cf(mini2440)以及16a(smdk2440)这两个机器ID,是否支持我们开发板
发现只有7cf(mini2440)这个ID,有串口输出正常.
来看看16a(smdk2440)为什么串口乱码,进入mach-smdk2440.c( 位于arch/arm/mach-s3c24xx)
找到问题出在smdk2440_map_io():
static void __init smdk2440_map_io(void)
{
s3c24xx_init_io(smdk2440_iodesc, ARRAY_SIZE(smdk2440_iodesc));
s3c24xx_init_clocks(); //初始化时钟clock
s3c24xx_init_uarts(smdk2440_uartcfgs, ARRAY_SIZE(smdk2440_uartcfgs));
}
由于我们板子上的晶振是12Mhz,而mdk2440_map_io()里,初始化的时钟是基于16934400hz的晶振.
所以将:
s3c24xx_init_clocks(); //初始化时钟clock
改为:
s3c24xx_init_clocks(); //初始化时钟clock
然后重新编译uImage:
make s3c2410_defconfig //将mach-s3c2440.c配置进内核
make uImage
cp uImage /work/nfs_root/ uImage_new
进入uboot,输入:
set machid 16a
nfs 192.168.2.106:/work/nfs_root/uImage_new
boom
启动内核,打印如下图所示:
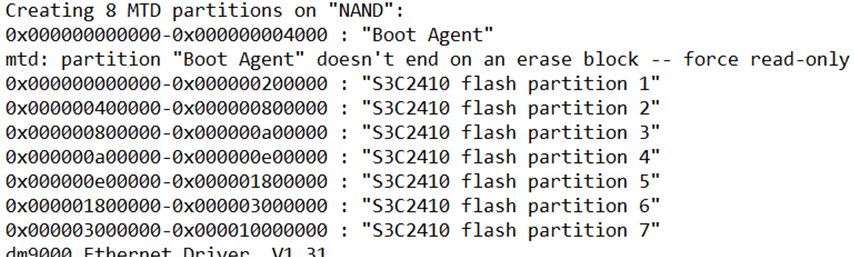
如上图所示,内核创建了个分区,而我们移植的uboot只有个分区,代码如下:
0x00000000-0x00040000 : "bootloader" //存放uboot
0x00040000-0x00060000 : "params" //存放环境变量
0x00060000-0x00260000 : "kernel" //存放内核
0x00260000-0x10000000 : "rootfs" //存放文件系统
uboot传递的文件系统路径root=/dev/mtdblock3,所以内核便卡死在启动文件系统上
4.所以接下来我们来修改内核分区
4.1在si里搜索上图出现的”S3C2410 flash partition”字段
如下图所示:

找到位于common-smdk.c中,里面有个数组smdk_default_nand_part[],内容如下所示:
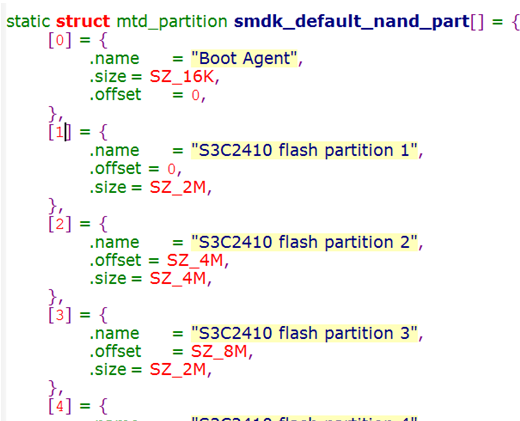
4.2接下来便修改smdk_default_nand_part[]数组(位于arch/arm/mach-s3c24xx/common-smdk.c)
修改为:
static struct mtd_partition smdk_default_nand_part[] = {
[] = {
.name = "bootloader", //0x00000000-0x00040000
.size = SZ_256K,
.offset = ,
},
[] = {
.name = "params", //0x00040000-0x00060000
.offset = MTDPART_OFS_APPEND,
.size = SZ_128K,
},
[] = {
.name = "kernel", //0x00060000-0x00260000
.offset = MTDPART_OFS_APPEND,
.size = SZ_2M,
},
[] = {
.name = "rootfs", //0x00260000-0x10000000
.offset = MTDPART_OFS_APPEND,
.size = MTDPART_SIZ_FULL,
}
};
上面部分宏的定义,如下所示:
- MTDPART_OFS_RETAIN: 填在offset里,表示先后保留多少size空间大小
- MTDPART_OFS_NXTBLK: 填在offset里,表示从下一个块开始
- MTDPART_OFS_APPEND: 填在offset里,表示该分区位置附加在上个分区结束的地址上
- MTDPART_SIZ_FULL: 填在size里,表示剩下的内存size都归于该分区
4.3若需要mini2440的机器ID,则还需要修改mini2440单板对应的mach-mini2440.c
因为该单板的mtd分区也不对,将里面的mini2440_default_nand_part[]内容改为和上面一样
4.4改好后,重启内核,发现内核还是启动不了以前的yaffs文件系统
如下图所示:

表示不支持该内核不支持yaffs文件系统,然后尝试使用ext3 ext2 cramfs vfat msdos iso9660等来挂载
4.5 尝试使用以前的jffs2文件系统
重新烧写jffs2,设置uboot环境变量,启动内核,打印如下图:

上图,表示jffs2已挂载,但是找不到init程序,因为这个文件系统的glibc库是交叉编译3.4版本的,由于3.4内核的交叉编译是4.3版本,所以不支持,接下来我们便重新制作文件系统
5.构造根文件系统
5.1首先编译安装busybox(参考以前的busybox安装章节)
进入https://busybox.net/下载busybox 1.20.0
tar -xjf busybox-1.20..tar.bz2
cd busybox-1.20.
make menuconfig //设置交叉编译前缀
进入Busybox Settings --->Build Options --->
() Cross Compiler prefix
在弹出的对话框里面写入:arm-linux-
make //编译
mkdir /work/nfs_root/fs_mini_mdev_new //创建要安装的文件系统目录
make install CONFIG_PREFIX=/work/nfs_root/fs_mini_mdev_new //指定安装位置
5.2 安装glibc库
输入$PATH找到交叉编译位于/work/tools/arm-linux-gcc-4.3.2/usr/local/arm/4.3.2位置,
通过find -name lib,找到有以下几个lib
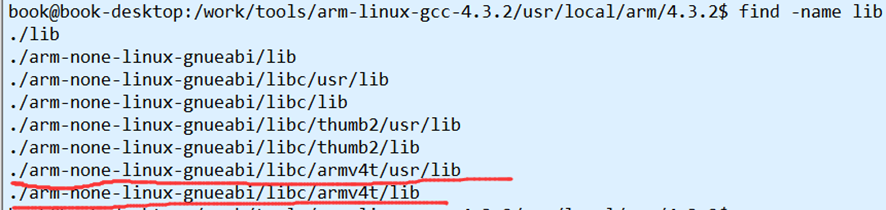
由于ARM9属于ARMv4T架构,所以拷贝上面两条红线处的lib到fs_mini_mdev_new里
mkdir /work/nfs_root/fs_mini_mdev_new/lib
mkdir /work/nfs_root/fs_mini_mdev_new/usr/lib -p
cp arm-none-linux-gnueabi/libc/armv4t/usr/lib/*.so* /work/nfs_root/fs_mini_mdev_new/usr/lib -d /* -d:保持链接 */
cp arm-none-linux-gnueabi/libc/armv4t/lib/*.so* /work/nfs_root/fs_mini_mdev_new/lib -d
5.3 构造etc目录
在etc目录下,需要构造以下3个文件
- etc/inittab : init进程会根据inittab文件里,来创建其它子进程,比如
- etc/init.d/rcS:脚本文件,里面用来执行命令,比如设置网卡,使用mount -a来装载/etc/fstab中的文件系统
- etc/fstab :里面保存要被挂载的哪个文件系统,比如proc、sysfs、tmpfs、devpts等系统
1)构造/etc/inittab
cd cd /work/nfs_root/fs_mini_mdev_new/
mkdir etc/
vi etc/inittab
添加以下几句:
::sysinit:/etc/init.d/rcS //内核启动时,执行/etc/init.d/rcS
console::askfirst:-/bin/sh //启动console对应的-/bin/sh进程之前,等待用户按enter键
::ctrlaltdel:/sbin/reboot //按下ctrl+alt+del组合键时,启动reboot命令
::shutdown:/bin/umount -a -r //系统关机前,卸载所有文件系统
2)构造etc/init.d/rcS
mkdir etc/init.d/
vi etc/init.d/rcS
添加以下几句:
mount -a //装载/etc/fstab中的文件系统
echo /sbin/mdev > /proc/sys/kernel/hotplug //使/sbin/medv指向hotplug,从而支持热拔插
mdev -s //使用medv命令自动创建/dev下的所有设备节点
并给rcS加上可执行权限:
sudo chmod +x etc/init.d/rcS //使脚本rcS能够执行命令
3)构造etc/fstab
PS:使用mdev命令需要sysfs、tmpfs、devpts这3个文件系统的支持
mkdir proc/ //创建proc要挂载的目录
mkdir sys/ //创建sysfs要挂载的目录,
mkdir dev/pts -p //创建devpts要挂载的目录
vi etc/fstab
添加以下几句
# device mount-point type options dump fsck order
proc /proc proc defaults
tmpfs /tmp tmpfs defaults
sysfs /sys sysfs defaults
devpts /dev/pts devpts defaults
5.4构造其它文件/目录
1)创建终端文件(dev/console和dev/null)
sudo mknod –m dev/console c
sudo mknod –m dev/null c
2)创建其它目录
mkdir mnt tmp root
6.制作jffs2映像文件
由于mkfs.jffs2工具之前已经安装好了,所以直接使用mkfs.jffs2命令:
cd /work/nfs_root/ //返回到上个目录
mkfs.jffs2 -n -s -e 128KiB -d fs_mini_mdev_new -o fs_mini_mdev_new.jffs2
//-n:表示每块不添加清除标记,-s:NAND的每页为2k,-e: NAND的每块为128kb
//-d fs_mini_mdev_new:表示要制作的根文件系统文件
//-o fs_mini_mdev_new.jffs2:表示生成的映像文件
7.烧写jffs2,启动内核
nfs 192.168.2.106:/work/nfs_root/fs_mini_mdev_new.jffs2
nand erase.part rootfs
nand write.jffs2 $filesize
set bootargs console=ttySAC0, root=/dev/mtdblock3 rootfstype=jffs2
nfs 192.168.2.106:/work/nfs_root/uImage_new
bootm
7.1启动内核
打印如下图所示:

进入si,搜索exitcode,找到0x00000004对应的宏定义是SIGILL,表示非法指令
是因为arm-linux-gcc-4.3.2是使用的EABI接口,内核由于未配置,所以出现非法
7.2 配置内核支持EABI
输入make menuconfig,搜索EABI,找到位于:
kernel feature->
[*] Use the ARM EABI to compile the kernel
make uImage
重新编译烧写内核就没问题了
未完待续,下章学习如何使内核支持yaffs系统
1.移植3.4内核-分析内核启动过程,重新分区,烧写jffs2文件系统的更多相关文章
- ARM linux解析之压缩内核zImage的启动过程
ARM linux解析之压缩内核zImage的启动过程 semilog@163.com 首先,我们要知道在zImage的生成过程中,是把arch/arm/boot/compressed/head.s ...
- Linux内核分析(四)----进程管理|网络子系统|虚拟文件系统|驱动简介
原文:Linux内核分析(四)----进程管理|网络子系统|虚拟文件系统|驱动简介 Linux内核分析(四) 两天没有更新了,上次博文我们分析了linux的内存管理子系统,本来我不想对接下来的进程管理 ...
- Windows内核分析——内核调试机制的实现(NtCreateDebugObject、DbgkpPostFakeProcessCreateMessages、DbgkpPostFakeThreadMessages分析)
本文主要分析内核中与调试相关的几个内核函数. 首先是NtCreateDebugObject函数,用于创建一个内核调试对象,分析程序可知,其实只是一层对ObCreateObject的封装,并初始化一些结 ...
- Nimbus<三>Storm源码分析--Nimbus启动过程
Nimbus server, 首先从启动命令开始, 同样是使用storm命令"storm nimbus”来启动看下源码, 此处和上面client不同, jvmtype="-serv ...
- mybatis源码分析:启动过程
mybatis在开发中作为一个ORM框架使用的比较多,所谓ORM指的是Object Relation Mapping,直译过来就是对象关系映射,这个映射指的是java中的对象和数据库中的记录的映射,也 ...
- workerman源码分析之启动过程
PHP一直以来以草根示人,它简单,易学,被大量应用于web开发,非常可惜的是大部分开发都在简单的增删改查,或者加上pdo,redis等客户端甚至分布式,以及规避语言本身的缺陷.然而这实在太委屈PHP了 ...
- 二、先在SD卡上启动U-boot,再烧写新的U-boot进Nandflash
1. 制作SD卡 先准备一张2G的SD卡(不能用8G的,2G的卡和8G的卡协议不一样),和烧写SD卡的工具write_sd以及需要烧写到SD卡中的u-boot-movi.bin.将SD卡格式化后连接到 ...
- Linux内核分析--内核中的数据结构双向链表续【转】
在解释完内核中的链表基本知识以后,下面解释链表的重要接口操作: 1. 声明和初始化 实际上Linux只定义了链表节点,并没有专门定义链表头,那么一个链表结构是如何建立起来的呢?让我们来看看LIST_H ...
- Linux内核分析--内核中的数据结构双向链表【转】
本文转自:http://blog.csdn.net/yusiguyuan/article/details/19840065 一.首先介绍内核中链表 内核中定义的链表是双向链表,在上篇文章--libev ...
随机推荐
- bzoj 3999: [TJOI2015]旅游
Description 为了提高智商,ZJY准备去往一个新世界去旅游.这个世界的城市布局像一棵树.每两座城市之间只有一条路径可 以互达.每座城市都有一种宝石,有一定的价格.ZJY为了赚取最高利益,她会 ...
- nginx php上传配置
.file_uploads 设为On,允许通过HTTP上传文件 2.upload_tmp_dir 文件上传至服务器时用于临时存储的目录,如果没指定,系统会使用默认的临时文件夹(我的机器是/tmp). ...
- Golang丰富的I/O 二----cgo版Hello World
h1 { margin-top: 0.6cm; margin-bottom: 0.58cm; direction: ltr; color: #000000; line-height: 200%; te ...
- Cleaner, more elegant, and harder to recognize (msdn blog)
It appears that some people interpreted the title of one of my rants from many months ago, "Cle ...
- 视觉SLAM的方案总结
MoNoSLAM:https://github.com/hanmekim/SceneLib2 以扩展卡尔曼滤波为后端,追踪前端非常稀疏的特征点,以相机的当前状态和所有路标点为状态量,更新其均值和协方差 ...
- Volatile的作用
众所周知,volatile关键字可以让线程的修改立刻通知其他的线程,从而达到数据一致的作用.那么它具体涉及到哪些内容呢? 关于缓存 计算机最大的存储空间就是磁盘(硬盘),但是访问的速度也是最慢的,价格 ...
- Flask快速入门,知识整理
一.Flask介绍(轻量级的框架,非常快速的就能把程序搭建起来) Flask是一个基于Python开发并且依赖jinja2模板和Werkzeug WSGI服务的一个微型框架,对于Werkzeug本质是 ...
- 关于linux命令ssh的总结
因为项目计算量比较大,需要将任务分布到多台电脑上面运行,因为对于分布式概念不熟,就想到了linux最简单的ssh协议,远程控制其他电脑,然后写shell脚本统一在所有电脑上运行程序.(我的操作系统为U ...
- Netty入门之客户端与服务端通信(二)
Netty入门之客户端与服务端通信(二) 一.简介 在上一篇博文中笔者写了关于Netty入门级的Hello World程序.书接上回,本博文是关于客户端与服务端的通信,感觉也没什么好说的了,直接上代码 ...
- Yarn篇--搭建yran集群
一.前述 有了上次hadoop集群的搭建,搭建yarn就简单多了.废话不多说,直接来 二.规划 三.配置如下 yarn-site.xml配置 <property> <n ...