OpenCV 之 图像分割 (一)
1 基于阈值
1.1 灰度阈值化
灰度阈值化,是最简单,速度最快的图像分割方法,广泛用于硬件图像处理领域 (例如,基于 FPGA 的实时图像处理等)。
设输入图像 $f$,输出图像 $g$,则阈值化公式为:
$\quad g(i, j) = \begin{cases} 1 & \text{当 f(i, j) ≥ T 时} \\0 & \text{当 f(i, j) < T 时} \\ \end{cases} $
即,遍历图像中所有像素,当像素值 $f (i, j) ≥ T$ 时,分割后的图像元素 $g (i, j)$ 是物体像素,否则为背景像素。
当各物体不接触,且 物体和背景的灰度值差别比较明显 时,灰度阈值化是非常合适的分割方法。

1.2 固定阈值化
固定阈值化函数为 threshold,如下:
double cv::threshold (
InputArray src, // 输入图像 (单通道,8位或32位浮点型)
OutputArray dst, // 输出图像 (大小和类型,都同输入)
double thresh, // 阈值
double maxval, // 最大灰度值(使用 THRESH_BINARY 和 THRESH_BINARY_INV类型时)
int type // 阈值化类型(THRESH_BINARY, THRESH_BINARY_INV; THRESH_TRUNC; THRESH_TOZERO, THRESH_TOZERO_INV)
)
1) THRESH_BINARY
$\qquad dst(x, y) = \begin{cases} maxval & \text{if src(x, y) > thresh} \\0 & \text{otherwise} \\ \end{cases} $
2) THRESH_TRUNC
$\qquad dst(x, y) = \begin{cases} threshold & \text{if src(x, y) > thresh} \\src(x, y) & \text{otherwise} \\ \end{cases} $
3) THRESH_TOZERO
$\qquad dst(x, y) = \begin{cases} src(x, y) & \text{if src(x, y) > thresh} \\0 & \text{otherwise} \\ \end{cases} $
1.3 自适应阈值化
整幅图像使用同一个阈值做二值化,对于一些情况并不适用,尤其是当图像中的不同区域,照明条件各不相同时。这种情况下,就需要自适应阈值算法,该算法可根据像素所在的区域,来确定一个适合的阈值。因此,对于一幅图中光照不同的区域,可取各自不同的阈值做二值化。
OpenCV 中,自适应阈值化函数为 adaptiveThreshold(),如下:
void cv::adaptiveThreshold (
InputArray src, //
OutputArray dst, //
double maxValue, //
int adaptiveMethod, // 自适应阈值算法,目前有 ADAPTIVE_THRESH_MEAN_C 和 ADAPTIVE_THRESH_GAUSSIAN_C 两种
int thresholdType, // 阈值化类型,同 threshold() 中的 type
int blockSize, // 邻域大小
double C //
)
1.4 示例
1)阈值化类型和阈值可选的代码示例,摘自 OpenCV 例程,略作修改
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp" using namespace cv; int threshold_value = ;
int threshold_type = ;
int const max_value = ;
int const max_type = ;
int const max_BINARY_value = ; Mat src, src_gray, dst;
const char* window_name = "Threshold Demo"; const char* trackbar_type = "Type: \n 0: Binary \n 1: Binary Inverted \n 2: Truncate \n 3: To Zero \n 4: To Zero Inverted";
const char* trackbar_value = "Value"; void Threshold_Demo(int, void*); int main( int, char** argv )
{
// 读图
src = imread("Musikhaus.jpg",IMREAD_COLOR);
if( src.empty() )
return -; // 转化为灰度图
cvtColor( src, src_gray, COLOR_BGR2GRAY );
// 显示窗口
namedWindow( window_name, WINDOW_AUTOSIZE );
// 滑动条 - 阈值化类型
createTrackbar( trackbar_type, window_name, &threshold_type,max_type,Threshold_Demo);
// 滑动条 - 阈值
createTrackbar( trackbar_value,window_name, &threshold_value,max_value,Threshold_Demo); Threshold_Demo(, ); waitKey();
} void Threshold_Demo(int, void*)
{
/* 0: Binary
1: Binary Inverted
2: Threshold Truncated
3: Threshold to Zero
4: Threshold to Zero Inverted
*/
threshold(src_gray, dst, threshold_value, max_BINARY_value, threshold_type);
imshow(window_name, dst);
}
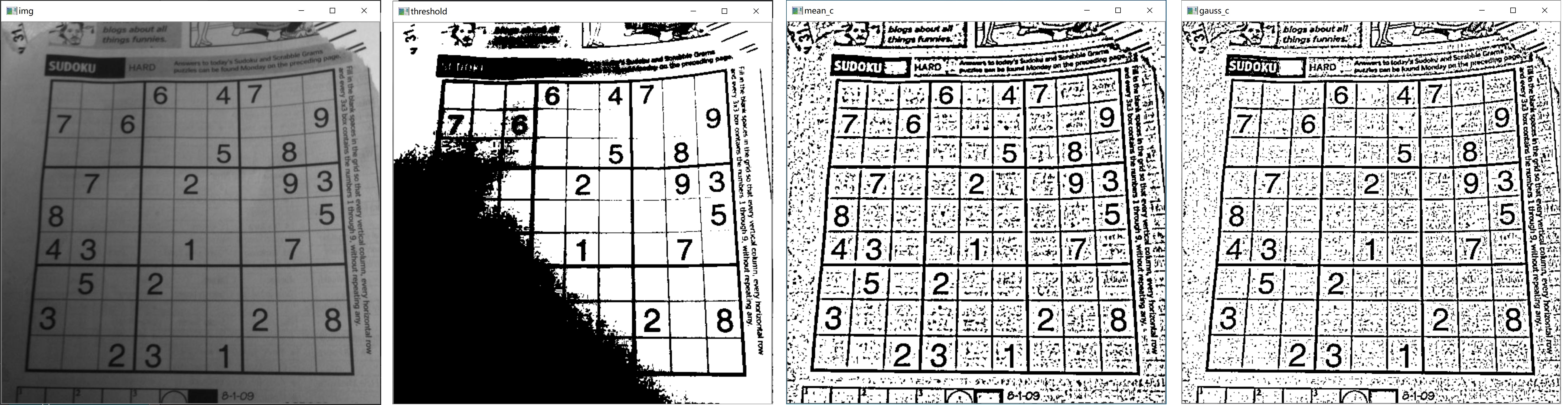
2)全局阈值和自适应阈值的比较,代码如下:
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp> using namespace cv; int main()
{
// read an image
Mat img = imread("sudoku.png");
cvtColor(img,img,COLOR_BGR2GRAY); // adaptive
Mat dst1, dst2, dst3;
threshold(img, dst1, , , THRESH_BINARY);
adaptiveThreshold(img, dst2, ,ADAPTIVE_THRESH_MEAN_C ,THRESH_BINARY,,);
adaptiveThreshold(img, dst3, ,ADAPTIVE_THRESH_GAUSSIAN_C ,THRESH_BINARY,,); // show images
imshow("img", img);
imshow("threshold", dst1);
imshow("mean_c", dst2);
imshow("gauss_c", dst3); waitKey();
}
对比显示的结果为:
2 基于边缘
前一篇 <OpenCV 之 边缘检测> 中,介绍了三种常用的边缘检测算子: Sobel, Laplace 和 Canny 算子。
实际上,边缘检测的结果是一个个的点,并不能作为图像分割的结果,必须采用进一步的处理,将边缘点沿着图像的边界连接起来,形成边缘链。
2.1 轮廓函数
OpenCV 中,可在图像的边缘检测之后,使用 findContours 寻找到轮廓,该函数参数如下:
image 一般为二值化图像,可由 compare, inRange, threshold , adaptiveThreshold, Canny 等函数来获得;
hierarchy 为可选的参数,如果不选择该参数,则可得到 findContours 函数的第二种形式;
// 形式一
void findContours (
InputOutputArray image, // 输入图像
OutputArrayOfArrays contours, // 检测到的轮廓
OutputArray hierarchy, // 可选的输出向量
int mode, // 轮廓获取模式 (RETR_EXTERNAL, RETR_LIST, RETR_CCOMP,RETR_TREE, RETR_FLOODFILL)
int method, // 轮廓近似算法 (CHAIN_APPROX_NONE, CHAIN_APPROX_SIMPLE, CHAIN_APPROX_TC89_L1, CHAIN_APPROX_TC89_KCOS)
Point offset = Point() // 轮廓偏移量
)
// 形式二
void findContours (
InputOutputArray image,
OutputArrayOfArrays contours,
int mode,
int method,
Point offset = Point()
)
drawContours 函数参数如下:
void drawContours (
InputOutputArray image, // 目标图像
InputArrayOfArrays contours, // 所有的输入轮廓
int contourIdx, //
const Scalar & color, // 轮廓颜色
int thickness = , // 轮廓线厚度
int lineType = LINE_8, //
InputArray hierarchy = noArray(), //
int maxLevel = INT_MAX, //
Point offset = Point() //
)
2.2 例程
代码摘自 OpenCV 例程,略有修改
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp" using namespace cv;
using namespace std; Mat src,src_gray;
int thresh = ;
int max_thresh = ;
RNG rng(); void thresh_callback(int, void* ); int main( int, char** argv )
{
// 读图
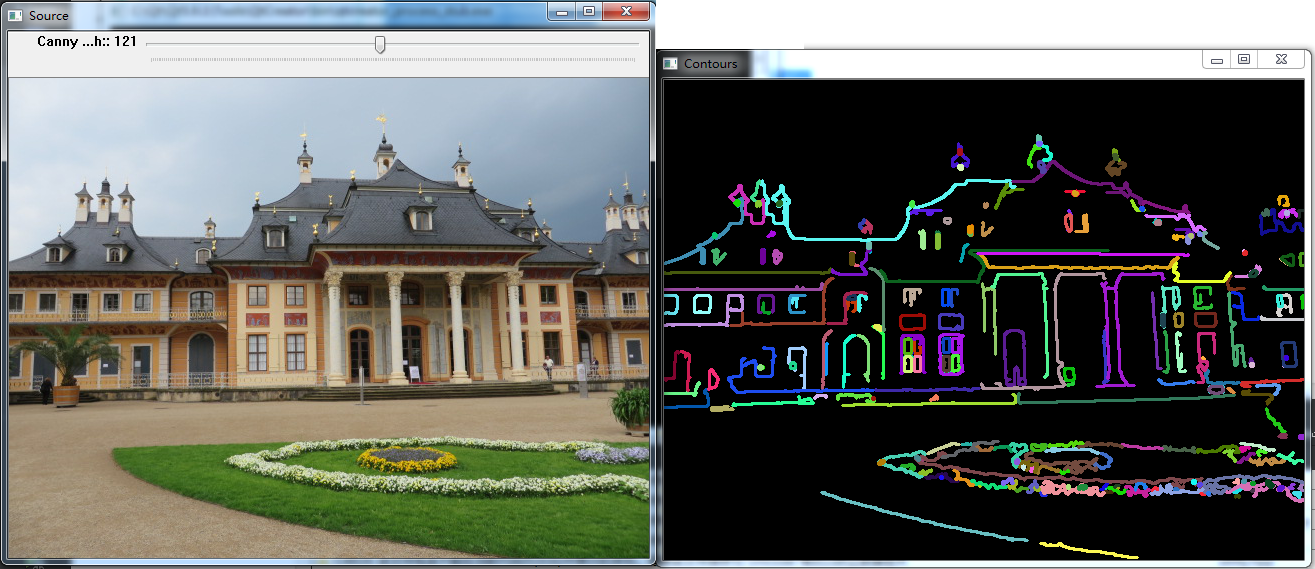
src = imread("Pillnitz.jpg", IMREAD_COLOR);
if (src.empty())
return -; // 转化为灰度图
cvtColor(src, src_gray, COLOR_BGR2GRAY );
blur(src_gray, src_gray, Size(,) ); // 显示
namedWindow("Source", WINDOW_AUTOSIZE );
imshow( "Source", src ); // 滑动条
createTrackbar("Canny thresh:", "Source", &thresh, max_thresh, thresh_callback ); // 回调函数
thresh_callback( , ); waitKey();
} // 回调函数
void thresh_callback(int, void* )
{
Mat canny_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy; // canny 边缘检测
Canny(src_gray, canny_output, thresh, thresh*, ); // 寻找轮廓
findContours( canny_output, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(, ) ); Mat drawing = Mat::zeros( canny_output.size(), CV_8UC3); // 画出轮廓
for( size_t i = ; i< contours.size(); i++ ) {
Scalar color = Scalar( rng.uniform(, ), rng.uniform(,), rng.uniform(,) );
drawContours( drawing, contours, (int)i, color, , , hierarchy, , Point() );
} namedWindow( "Contours", WINDOW_AUTOSIZE );
imshow( "Contours", drawing );
}
以 Dresden 的 Schloss Pillnitz 为源图,输出如下:
参考资料
OpenCV Tutorials / imgproc module / Basic Thresholding Operations
OpenCV Tutorials / imgproc module / Finding contours in your image
OpenCV-Python Tutorials / Image Processing in OpenCV / Image Thresholding
<图像处理、分析与机器视觉>_第3版 第 6 章
Topological structural analysis of digitized binary images by border following [J], Satoshi Suzuki, 1985
更新记录
2020年4月26日,增加 “1.3 自适应阈值化” 和 “1.4 示例 - 自适应阈值代码”
OpenCV 之 图像分割 (一)的更多相关文章
- opencv::分水岭图像分割
分水岭分割方法原理 (3种) - 基于浸泡理论的分水岭分割方法 (距离) - 基于连通图的方法 - 基于距离变换的方法 图像形态学操作: - 腐蚀与膨胀 - 开闭操作 分水岭算法运用 - 分割粘连对象 ...
- opencv::KMeans图像分割
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- opencv 金字塔图像分割
我所知的opencv中分割函数:watershed(只是看看效果,不能返回每类pixel类属),cvsegmentImage,cvPyrSegmentation(返回pixel类属) 金字塔分割原理篇 ...
- opencv kmeans 图像分割
利用kmeans算法,将彩色图像的像素点作为样本,rgb值作为样本的属性, 对图像所有的像素点进行分类,从而实现对图像中目标的分割. c++代码(openCV 2.4.11) Scalar color ...
- OpenCV meanshift 图像分割代码
参考:这个帖子的主要代码有错误,根据回帖改了一些 http://www.cnblogs.com/tornadomeet/archive/2012/06/06/2538695.html // means ...
- OpenCV 1 图像分割--分水岭算法代码
// watershed_test20140801.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" // // ch9_watershed ...
- opencv 彩色图像分割(inrange)
灰度图像大多通过算子寻找边缘和区域生长融合来分割图像. 彩色图像增加了色彩信息,可以通过不同的色彩值来分割图像,常用彩色空间HSV/HSI, RGB, LAB等都可以用于分割! 笔者主要介绍inran ...
- 图像金字塔及其在 OpenCV 中的应用范例(下)
前言 本文将主要讲解如何使用 OpenCV 实现图像分割,这也是图像金字塔在 OpenCV 中的一个重要应用. 关于图像分割 在计算机视觉领域,图像分割(Segmentation)指的是将数字图像细分 ...
- 第八节、图片分割之GrabCut算法、分水岭算法
所谓图像分割指的是根据灰度.颜色.纹理和形状等特征把图像划分成若干互不交迭的区域,并使这些特征在同一区域内呈现出相似性,而在不同区域间呈现出明显的差异性.我们先对目前主要的图像分割方法做个概述,后面再 ...
随机推荐
- Google Android Studio Kotlin 开发环境配置
Google 近日开发者大会宣布Kotlin成为Android开发的第一级语言,即Android官方开发语言,可见Google对Kotlin的重视,本文就介绍一下Android Studio下的Kot ...
- How to parse project properties or how to parse files with key-value pair
If a file has content like raven.enabled = false raven.host = "localhost" raven.port = 808 ...
- 如何安装Elasticsearch?
最近工作中要用到搜索引擎,由于目前用的搜索引擎是LeanCloud 提供的 ,不太好用,不支持范围等搜索,而且每天还收费30元,请求次数也有限制.基于这些原因,我们只好在自己的服务器上部署搜索引擎了. ...
- 基于Android的上课助手的概况及第一周冲刺详情
基于Android平台的上课助手 一. 功能简介 课表查询 课程提醒 空闲教室的查询 二. 开发环境 Android 三. 开发成员 组长:李志岩 成员:王亚蕊.孙 ...
- Android stdio打开特定网页
博主懒不想打字,直接上程序 package com.example.testopen; import android.app.Activity; import android.os.Bundle; ...
- 一、 开篇(ASP.NET MVC5 系列)
这个教程将教你一些用VS2013创建ASP.NET MVC 5 Web应用程序基础知识.为了避免开发工具的不一致而带来的一些小麻烦,建议你使用和我一样的开发工具VS2013英文版. 开发工具:Visu ...
- 聊一聊JQ中delegate事件委托的好处
下面举个例子 我们希望通过点击使得点击的li标签变红 <body style="height:2000px;"> <ul> <li>1111&l ...
- springboot + shiro + cas4.2.7 实战
1. 下载地址 https://github.com/apereo/cas/archive/v4.2.7.zip 2. 解压后, 用intellj idea 打开 3. 执行 gradle build ...
- JS组件系列——自己动手扩展BootstrapTable的treegrid功能
前言:上篇 JS组件系列——自己动手封装bootstrap-treegrid组件 博主自己动手封装了下treegrid的功能,但毕竟那个组件只是一个单独针对树形表格做的,适用性还比较有限.关注博主的 ...
- C++进阶引导
1.C++的用途和意义 t0185b047e29feffc26.jpg 总体来说,C++作为一门软件开发语言,它的流行度是在减少的.主要原因在于语言的复杂和灵活导致软件开发成本提高,这体现在开发周期和 ...